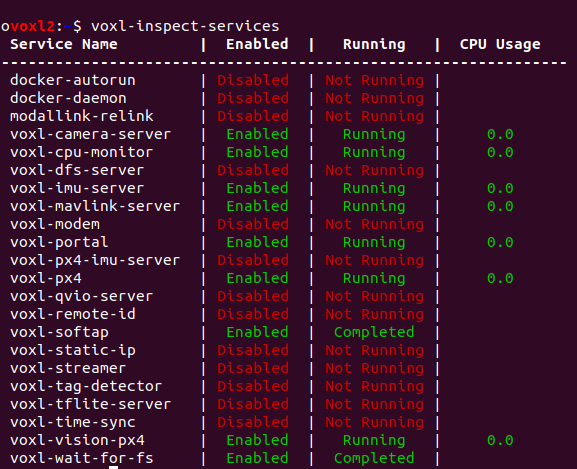
hey not sure if this is an @tom or @modaltb inquiry, but when following the steps for the kernel build guide, stuff is off with the drone. It boots up and I can adb fine, but there are issues with the wifi, similar to another post Tom helped me with two weeks ago, but for definitely not the same hardware-related reason. The wifi adaptable does not turn on and when you run voxl-wifi the mac address is undefined. I remember stepping through those scripts while troubleshooting the hardware issues and recall that script queries to find its mac address, which must be returning something invalid.
I have tested this with both of my drones. I can very easily flash them back with https://docs.modalai.com/sentinel-factory-reset/ and they operate as expected. While my desire is to edit part of the usb driver scripts, the kernel I am attempting to put on the drone is the unchanged version following the steps here https://docs.modalai.com/voxl2-kernel-build-guide/. The only deviation from the guide is that the guide is written for SDK 1.1.3. I have put 1.3.0 on both of my drones, and from my understanding the docker scripts pull the default branch of each repo which has the same commit tags as 1.7.8. I have included the output of dmesg for both the 1.3.0 image available from the downloads page, and the results when following the custom kernel build steps.
https://drive.google.com/drive/folders/14L5gLbAOfF2OcSW2rHFTI4VIoREkTCFJ?usp=sharing