@Alex-Kushleyev Copy all, we will try. Thank you.
Best posts made by rdjarvis
-
RE: Motor issues when running ESC calibrationposted in ESCs
-
RE: Motor issues when running ESC calibrationposted in ESCs
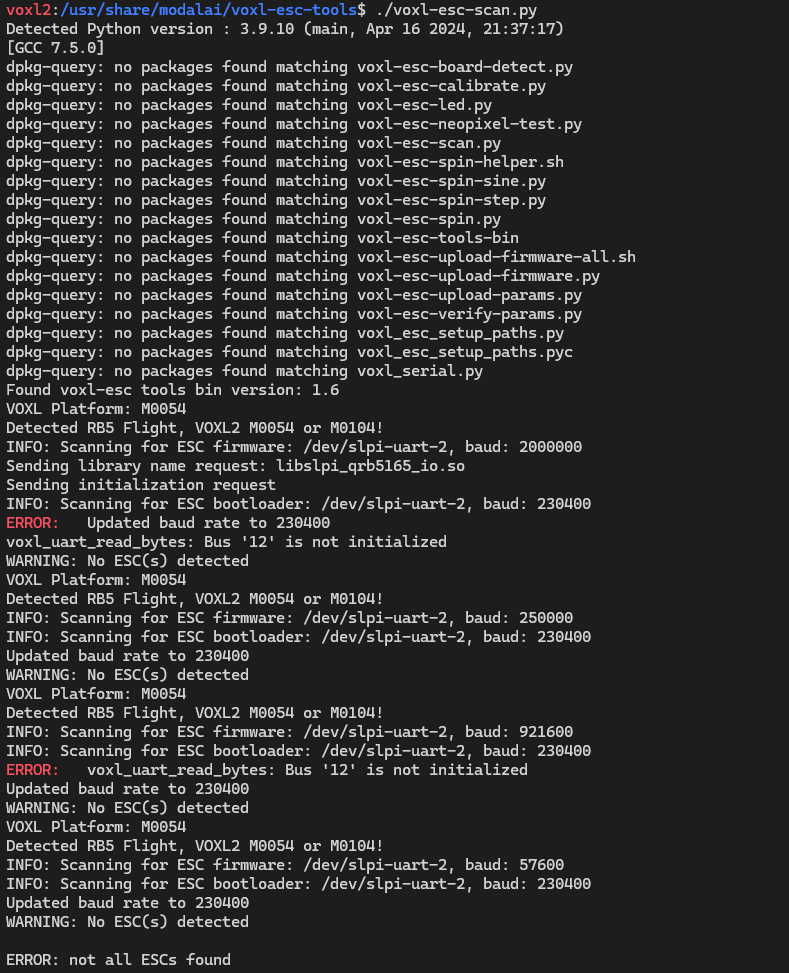
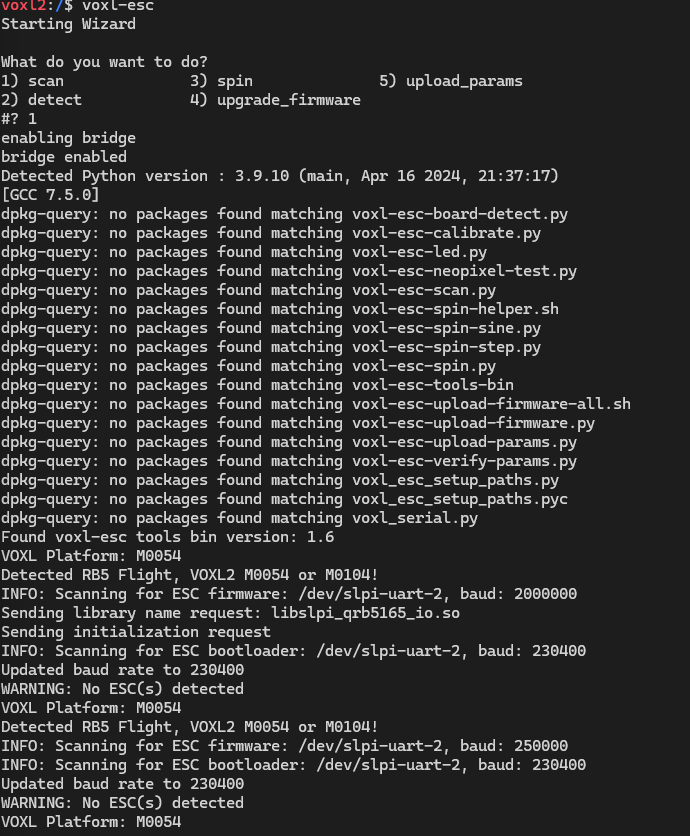
@Alex-Kushleyev after uploading the new params you sent the ESC no longer communicates with the VOXL2.
The ESC board is no longer recognized by VOXL2. All hardware is set up properly.
Screenshot 2024-04-17 110112.pngvoxl_uart_read_byte bus 12 is not initiated
Please point us in the right direction.
-
RE: Motor issues when running ESC calibrationposted in ESCs
@Alex-Kushleyev ESC gave
4 LEDs quickly flashing
4 LEDs flash 3 times
Motor chirps
{kind=link}
Latest posts made by rdjarvis
-
RE: GPS Troubleshootingposted in Ask your questions right here!
@Eric-Katzfey we were on 1.3.2, flashed 1.3.5 and had success!
-
RE: Voxl2 Immediately loses RCposted in Ask your questions right here!
We removed the RC and are able to fly with a wired gamepad.
Could the control loss be due to a voltage drop on the J19 12-PIN JST to the Rx? I will check later today.
-
RE: UAV climbs out of control in POSITION mode (All QVIO sensors successfully calibrated)posted in PX4 Autonomy Developer Kit
@Alex-Kushleyev As always, thanks Alex. I will plug away at it today and get back to you.
FYI FPV 4n1 ESC will be sent to you this week so you can evaluate when you get the time.
THanks,
RDJ -
RE: UAV climbs out of control in POSITION mode (All QVIO sensors successfully calibrated)posted in PX4 Autonomy Developer Kit
@Alex-Kushleyev When the UAV is stationary on the deck, looking at the same objects the VIO quality fluctuates, randomly from 0-100%. Occasionally (bad camera calibration/Not stationary/no position estimate) errors are sent. Is this a result of the camera server being overloaded, or are there any other issues we can investigate?
Thanks,
RDJ -
RE: UAV climbs out of control in POSITION mode (All QVIO sensors successfully calibrated)posted in PX4 Autonomy Developer Kit
@Alex-Kushleyev After logging 10 flights indoors/position we've noticed the Camera server is running at 100+%, and VIO around 30-40%. We disabled front and rear stereo for troubling shooting the tracking camera. Camera server dropped to 30-40% while running, but flight still tends to be erratic, but not uncontrollable.
Flight in Altitude and Manual are great, and honestly rather enjoyable.
Where should we start to optimize the tracking camera/VIO to keep dialing this in?
-
RE: UAV climbs out of control in POSITION mode (All QVIO sensors successfully calibrated)posted in PX4 Autonomy Developer Kit
@Alex-Kushleyev You are correct. After reviewing, studying and having a better understanding of the relationship between imu_apps and tracking we have achieved stable indoor flight in POSTION with QVIO.
Thank you for all you have done!
RDJ -
RE: UAV climbs out of control in POSITION mode (All QVIO sensors successfully calibrated)posted in PX4 Autonomy Developer Kit
Thank you for explaining this. We will review, test and get back to you.
Thanks again,
RDJ -
RE: UAV climbs out of control in POSITION mode (All QVIO sensors successfully calibrated)posted in PX4 Autonomy Developer Kit
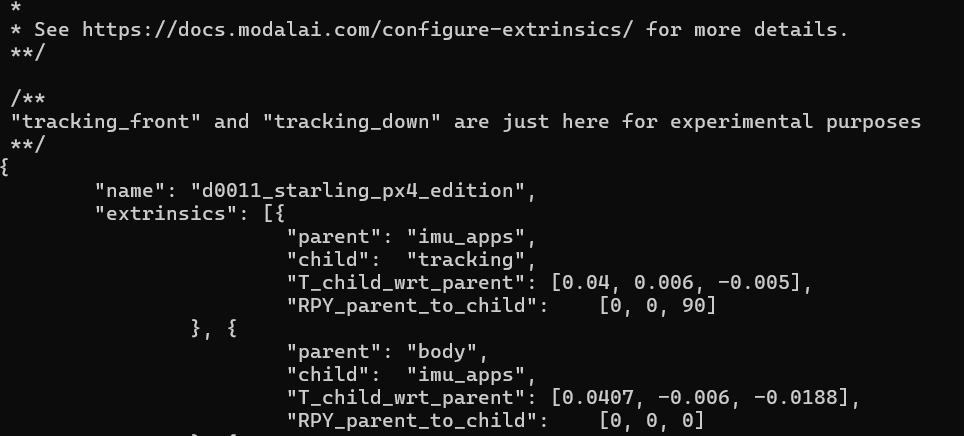
@Moderator Yes, as per ModalAI documentation, is says putting the camera in a vertical plane is ideal for indoor only operations.
We modified camera t wrt body from 45 to 0 for the vertical placement of camera.
UAV had identical unstable flight before this value and camera position was modified.
-
RE: UAV climbs out of control in POSITION mode (All QVIO sensors successfully calibrated)posted in PX4 Autonomy Developer Kit
@Alex-Kushleyev was the issue referenced at the start of this post from March ever resolved? It seems they had the same issues with a Starling UAV.
-
RE: UAV climbs out of control in POSITION mode (All QVIO sensors successfully calibrated)posted in PX4 Autonomy Developer Kit
Hello Alex,
- Yes, vehicle is in standard configuration for C11 DevKit
- Extrinsic have been set for the placement of IMU and VIO
- If this is an incorrect transform between the VIO IMU (IMU Apps) and Camera, how do we correct it other than adjusting extrinsics.conf file?
- When hand flying VIO quality fluctuates through the entire range -1 - 100%, in a multiple indoor, highly lite conditions.
- As you can see in the video link posted, points are tracked, and stay tracked as the VIO quality drops to 0 after takeoff.
Any suggestions?
Thanks,
RDJ