@Eric-Katzfey we were on 1.3.2, flashed 1.3.5 and had success!
Posts
-
GPS Troubleshooting -
Voxl2 Immediately loses RCWe removed the RC and are able to fly with a wired gamepad.
Could the control loss be due to a voltage drop on the J19 12-PIN JST to the Rx? I will check later today.
-
UAV climbs out of control in POSITION mode (All QVIO sensors successfully calibrated)@Alex-Kushleyev As always, thanks Alex. I will plug away at it today and get back to you.
FYI FPV 4n1 ESC will be sent to you this week so you can evaluate when you get the time.
THanks,
RDJ -
UAV climbs out of control in POSITION mode (All QVIO sensors successfully calibrated)@Alex-Kushleyev When the UAV is stationary on the deck, looking at the same objects the VIO quality fluctuates, randomly from 0-100%. Occasionally (bad camera calibration/Not stationary/no position estimate) errors are sent. Is this a result of the camera server being overloaded, or are there any other issues we can investigate?
Thanks,
RDJ -
UAV climbs out of control in POSITION mode (All QVIO sensors successfully calibrated)@Alex-Kushleyev After logging 10 flights indoors/position we've noticed the Camera server is running at 100+%, and VIO around 30-40%. We disabled front and rear stereo for troubling shooting the tracking camera. Camera server dropped to 30-40% while running, but flight still tends to be erratic, but not uncontrollable.
Flight in Altitude and Manual are great, and honestly rather enjoyable.
Where should we start to optimize the tracking camera/VIO to keep dialing this in?
-
UAV climbs out of control in POSITION mode (All QVIO sensors successfully calibrated)@Alex-Kushleyev You are correct. After reviewing, studying and having a better understanding of the relationship between imu_apps and tracking we have achieved stable indoor flight in POSTION with QVIO.
Thank you for all you have done!
RDJ -
UAV climbs out of control in POSITION mode (All QVIO sensors successfully calibrated)Thank you for explaining this. We will review, test and get back to you.
Thanks again,
RDJ -
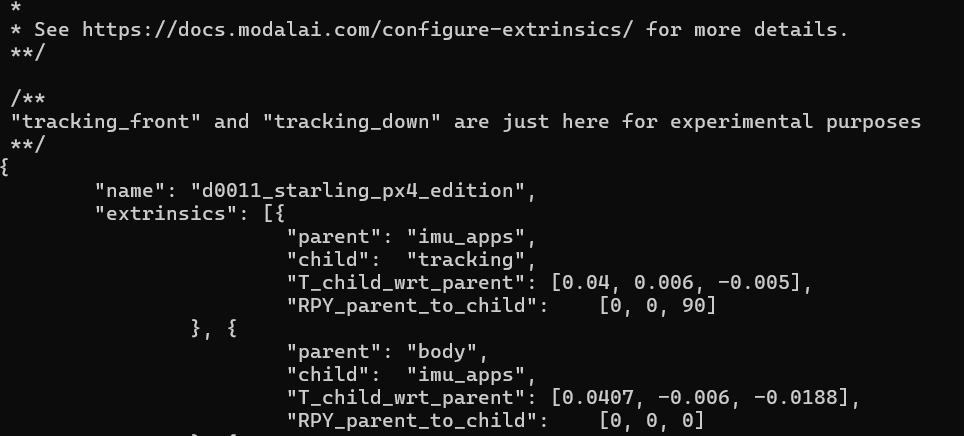
UAV climbs out of control in POSITION mode (All QVIO sensors successfully calibrated)@Moderator Yes, as per ModalAI documentation, is says putting the camera in a vertical plane is ideal for indoor only operations.
We modified camera t wrt body from 45 to 0 for the vertical placement of camera.
UAV had identical unstable flight before this value and camera position was modified.
-
UAV climbs out of control in POSITION mode (All QVIO sensors successfully calibrated)@Alex-Kushleyev was the issue referenced at the start of this post from March ever resolved? It seems they had the same issues with a Starling UAV.
-
UAV climbs out of control in POSITION mode (All QVIO sensors successfully calibrated)Hello Alex,
- Yes, vehicle is in standard configuration for C11 DevKit
- Extrinsic have been set for the placement of IMU and VIO
- If this is an incorrect transform between the VIO IMU (IMU Apps) and Camera, how do we correct it other than adjusting extrinsics.conf file?
- When hand flying VIO quality fluctuates through the entire range -1 - 100%, in a multiple indoor, highly lite conditions.
- As you can see in the video link posted, points are tracked, and stay tracked as the VIO quality drops to 0 after takeoff.
Any suggestions?
Thanks,
RDJ -
UAV climbs out of control in POSITION mode (All QVIO sensors successfully calibrated)@Moderator We have followed the QVIO trouble shooting steps.
I will post a screenshot of voxl-logger --preset_odometry and a short video clip of the QVIO overlay.
-Ryan
-
UAV climbs out of control in POSITION mode (All QVIO sensors successfully calibrated)Good morning team,

Starling gone rogue (uncontrollable) in Position flight mode
@Eric-Katzfey Hi, The first change of flight mode to "Altitude" was because of the loss of control of pilot (see it from the "Manual Control Output") on the ...
ModalAI Forum (forum.modalai.com)
We are experiencing the same issues when attempting to fly in POSITION mode.
UAV flies flawlessly in MANUAL mode, good vibes good gyros.
Indoor flight, tracking camera mounted vertically, not 45deg.
All cameras successfully calibrated.
QVIO Overlay in Web Portal is between 80-100% when armed on the deck.
Instantly drops to 6-13% on takeoff, with same number of points in QVIO Overlay.
UAV climbs, uncontrollably in POSTION and ALTITUDE modes, even after throttle reduced to 0.
Any help would be appreciated.
-
Motor issues when running ESC calibration@Alex-Kushleyev Thanks Alex, We will test it out. In the meantime my team will be sending the first FPV 4n1 ESC back, so you can investigate onsite.
Thank you,
RDJ -
Motor issues when running ESC calibration@Alex-Kushleyev I agree, what do you think the next troubleshooting step is for this issue?
-
Motor issues when running ESC calibration -
Motor issues when running ESC calibrationFrom the GCS, executed "take-off" command in "Position Mode" with props off. Motors smoothly increase. I "hand-flew" it up to 1m and UAV was adjusting for small movements correctly.
Executed "Land" and "hand-flew" it to the deck, landing detected and disarmed.
-
Motor issues when running ESC calibrationThrottle input is being "ignored" regardless of RC Channel input, same response (slow ramp up) when armed in any flight mode (Manual/Stab/Pos etc..) and throttle is increased, even when RC Channel is changed (1,2,3,4).
Motors respond correctly with pitch, yaw, and roll inputs.
PX4 FPV_RevBv4 params are uploaded, switched to 4S and put min/max RPM to 3000/40000.
-
Motor issues when running ESC calibration@Alex-Kushleyev No actionable response from throttle.
-
Motor issues when running ESC calibrationWe kept the custom ESC config for the 2203.5, and uploaded px4 FPV_RevB_v4.
Motors are more responsive in all channels, Throttle channel still conducts a "ramp up", but more aggresively when RC Tx input is applied.
-
Motor issues when running ESC calibrationcopy all, will do.
