Hi,
There are two answers to your question:
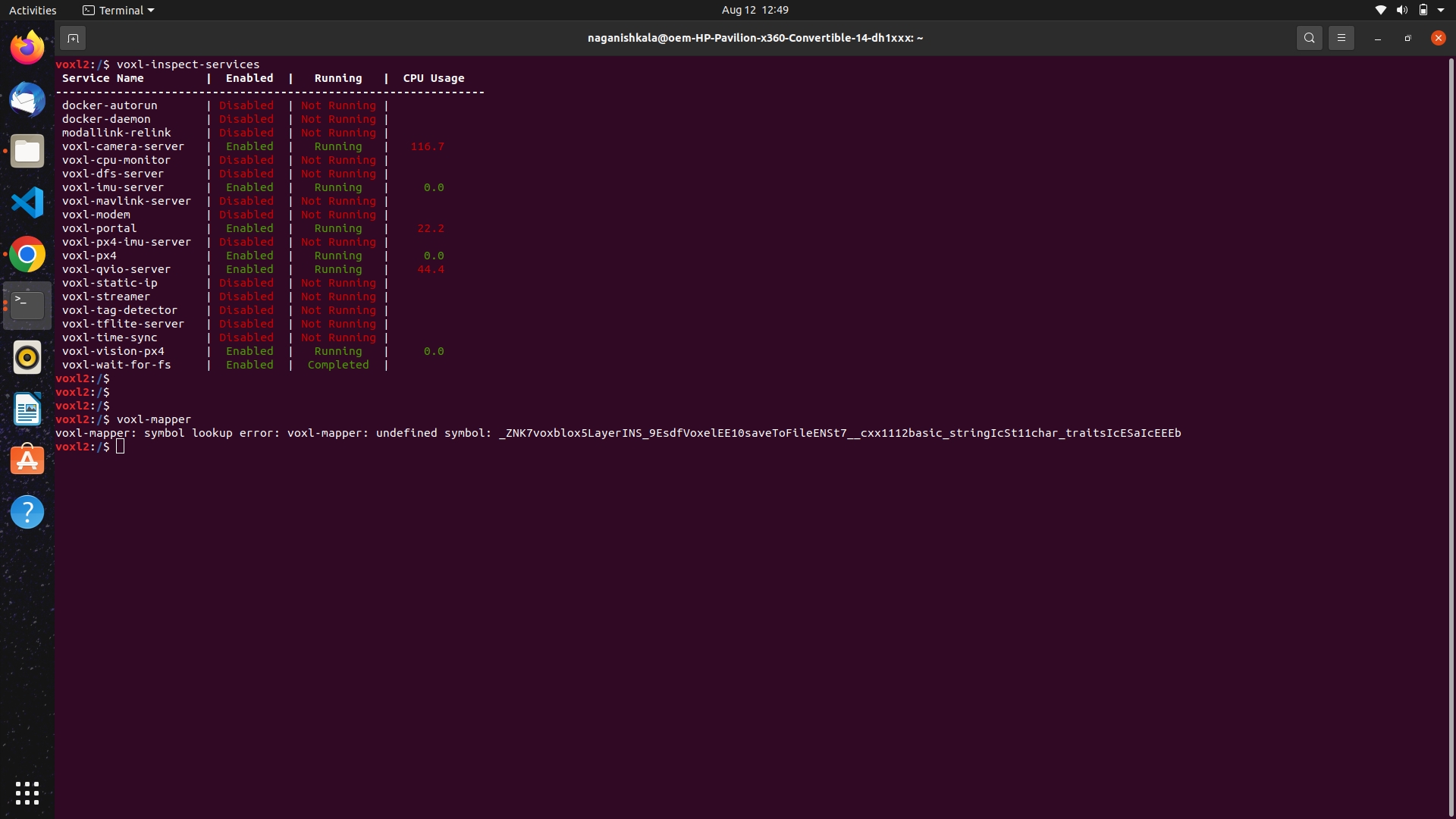
You can pipe depth input from voxl-dfs-server (if you're running stereo cameras) to voxl-mapper, or any other service that you may create that produces depth estimates (i.e. if you had a depth from motion project).
We absolutely plan to support the tof camera on voxl2, we're working on this right now internally and hope to support it in the next month or two.