@Alex-Kushleyev Thanks. Now calibration is starting. Solution is to use 5x6 checkerboard with trimmed in half squares on edges. But even we can do full calibration, it says failed in the end. Re-projection error for stereo calibration ( standalone cameras calibrate fine ) is very high. Any solutions for this?
P
Latest posts made by plub
-
RE: Tracking camera calibration not progressingposted in VOXL-CAM
-
RE: Tracking camera calibration not progressingposted in VOXL-CAM
@Alex-Kushleyev What do you mean by "start" the camera calibration? I've used command which i have pasted in previous post. Then i was able to see camera calibrator tool and images from stereo cameras. Red rectangles showed up but when i placed the chessboard inside them, nothings happened. I am using checkerboard recommended by you: 9x6 OpenCV chessboard. I've tried various combinations in front of the camera but calibration didn't started.
thanks for trying to help
Piotr
-
RE: Tracking camera calibration not progressingposted in VOXL-CAM
@Troi same issue here but with stereo camera and command:
voxl-calibrate-camera stereo_front -s 6x9 -l 0.030Did you resolve this?
-
RE: Sentinel VOA not visible in QGCposted in Ask your questions right here!
@Zachary-Lowell-0 Flight tests resulted in the failure of VOA operations. I set CP_GUIDE_ANG to 30 degrees. Unfortunately, after takeoff, the drone behaved as if it was locked and allowed to move only one way with a lot of resistance. I tried changing the parameters randomly but nothing worked. Could you please share your set of parameters?
-
RE: Sentinel VOA not visible in QGCposted in Ask your questions right here!
@Zachary-Lowell-0 Thank you.
I've tested VOA in-flight with CP_GUIDE_ANG set to 0 deg as suggested and drone was able to fly Up and Down only. Forward/Back and Left/Right commands from the controller were ignored and drone becomes stationary.
When i've changed CP_GUIDE_ANG to 30 deg drone was normally controllable in short sway test.
I've not tested VOA feature with CP_GUIDE_ANG set 30 deg because it is not your recommended parameter and I was afraid of unpredictable behavior.What are your thoughts on this?
-
Sentinel VOA not visible in QGCposted in Ask your questions right here!
Hello, i am using Sentinel with system:
-
system-image: 1.7.10-M0054-14.1a-perf
-
kernel: #1 SMP PREEMPT Fri Sep 27 21:18:59 UTC 2024 4.19.125
-
hw platform: M0054
-
mach.var: 1.0.0
- voxl-suite: 1.3.5
I can see VOA pointcloud in Voxl Portal and debug_voa_linescan data from voxl-vision-hub. CP parameters set as suggested:
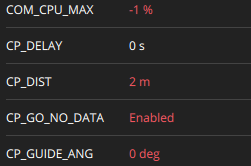
I am able to listen topic obstacle_distance in mavlink console but I am not able to see obstacle_distance in Mavlink inspector.

Could you please help me with this issue?
-
-
RE: Voxl-mapper on VOXL2posted in Mapping and Planning
@Zachary-Lowell-0 Does voxl-mapper need a TOF sensor to work properly?