Voxl-mapper on VOXL2
-
Hello,
I was wondering if there's any updates on voxl-mapper working on VOXL2? I saw the post saying that it was being worked on internally and wished to deploy voxl-mapper with the stereo camera input (for the depth sensor), or even purchase a ToF sensor in order to make a map of the indoors with the Sentinel drone. I saw this in the docs over SDK 0.9 and will follow this if still relevant.
Also, I am curious about the autonomous capability of the drone, or its capability for autonomous flight. Does the VOXL2 enable some sort of flight path planning which can be controlled either manually or autonomously? I wish to use it to navigate first in a small indoor drone cage but eventually move to autonomous flight capabilities where it can follow instructions based on what the vision system sees.
Thank you for your time as always!
-
voxl-mapper has been working on VOXL 2 for about a year. It should work out of the box on a Starling.
What you may be referring to is better documentation for using with stereo sensors instead of TOF sensors, but in general the voxl-mapper package is working.
This video shows how it works - https://www.youtube.com/watch?v=gqlSKRP8prc&ab_channel=ModalAI
-
voxl-mapper has been working on VOXL 2 for about a year. It should work out of the box on a Starling.
What you may be referring to is better documentation for using with stereo sensors instead of TOF sensors, but in general the voxl-mapper package is working.
This video shows how it works - https://www.youtube.com/watch?v=gqlSKRP8prc&ab_channel=ModalAI
@Moderator I see, does it also work out of the box on Sentinel? Or do some adjustments need to be made? I say this because I am not able to run it on the Sentinel currently.
-
@Moderator I see, does it also work out of the box on Sentinel? Or do some adjustments need to be made? I say this because I am not able to run it on the Sentinel currently.
-
voxl-mapper has been working on VOXL 2 for about a year. It should work out of the box on a Starling.
What you may be referring to is better documentation for using with stereo sensors instead of TOF sensors, but in general the voxl-mapper package is working.
This video shows how it works - https://www.youtube.com/watch?v=gqlSKRP8prc&ab_channel=ModalAI
@Moderator I will update it now and see if it becomes available
-
@Moderator @tom This might be a more general question but, is there any way to push the voxl-mapper code to the Sentinel from the Gitlab? I want to test out the pointcloud 3D reconstruction of the environment using the dfs server if possible? Is it SLAM capable with stereo on the Sentinel Development Drone, I see that it is availble for the Starling which has PMD TOF, Tracking, 4k30 image sensors but I haven't seen any documentation or video for the Sentinel which has 2 Stereo Pairs, Tracking, 4K High-Res image sensors.
What would be the best steps to move forward with my goal?
Thanks, as always!
-
@Moderator @tom This might be a more general question but, is there any way to push the voxl-mapper code to the Sentinel from the Gitlab? I want to test out the pointcloud 3D reconstruction of the environment using the dfs server if possible? Is it SLAM capable with stereo on the Sentinel Development Drone, I see that it is availble for the Starling which has PMD TOF, Tracking, 4k30 image sensors but I haven't seen any documentation or video for the Sentinel which has 2 Stereo Pairs, Tracking, 4K High-Res image sensors.
What would be the best steps to move forward with my goal?
Thanks, as always!
-
@Jgaucin If your Sentinel is on SDK 1.0, voxl-mapper 0.1.9 should be available onboard for installation by running
apt install voxl-mapper@tom Hello, due to the issue described in this discussion post here I wasn't able to run the dfs-server and therefore the voxl-mapper on SDK 1.0.0 on the Sentinel's VOXL2.
Now I am running into some issues after doing apt install voxl-mapper onto VOXL2 SDK 0.9.5 and running the command voxl-mapper on the Sentinel.
"ERROR fetching tf from tf ringbuffer
there wasn't sufficient data in the buffer"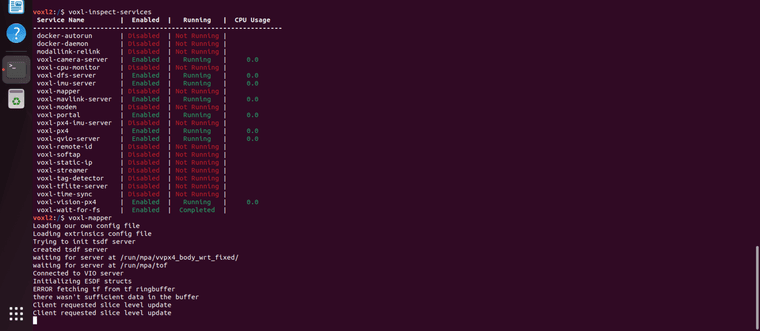
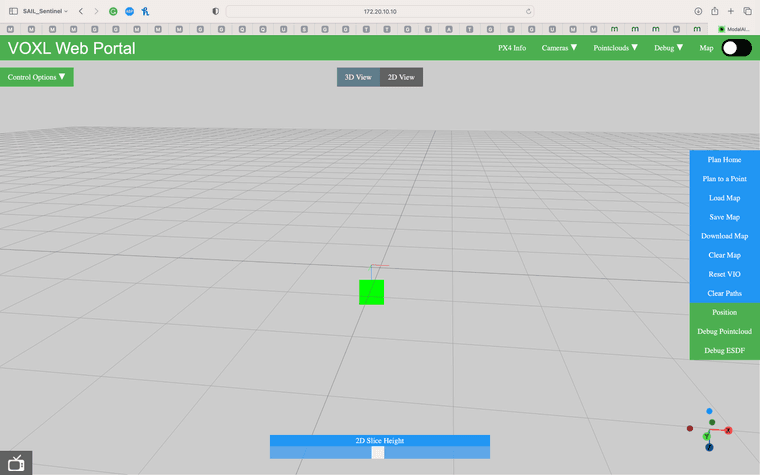
This only shows the following image onto voxl portal and does not construct a map.
Also, is this solution still relevant to 0.9.5? It states that there is an issue with the qvio server receiving a pose estimate here.
-
@tom Hello, due to the issue described in this discussion post here I wasn't able to run the dfs-server and therefore the voxl-mapper on SDK 1.0.0 on the Sentinel's VOXL2.
Now I am running into some issues after doing apt install voxl-mapper onto VOXL2 SDK 0.9.5 and running the command voxl-mapper on the Sentinel.
"ERROR fetching tf from tf ringbuffer
there wasn't sufficient data in the buffer"This only shows the following image onto voxl portal and does not construct a map.
Also, is this solution still relevant to 0.9.5? It states that there is an issue with the qvio server receiving a pose estimate here.
-
@tom nevermind, I got it figured out!
-
@tom nevermind, I got it figured out!
@Taylor-Presley Could you share how you solved the above error?
Thanks
-
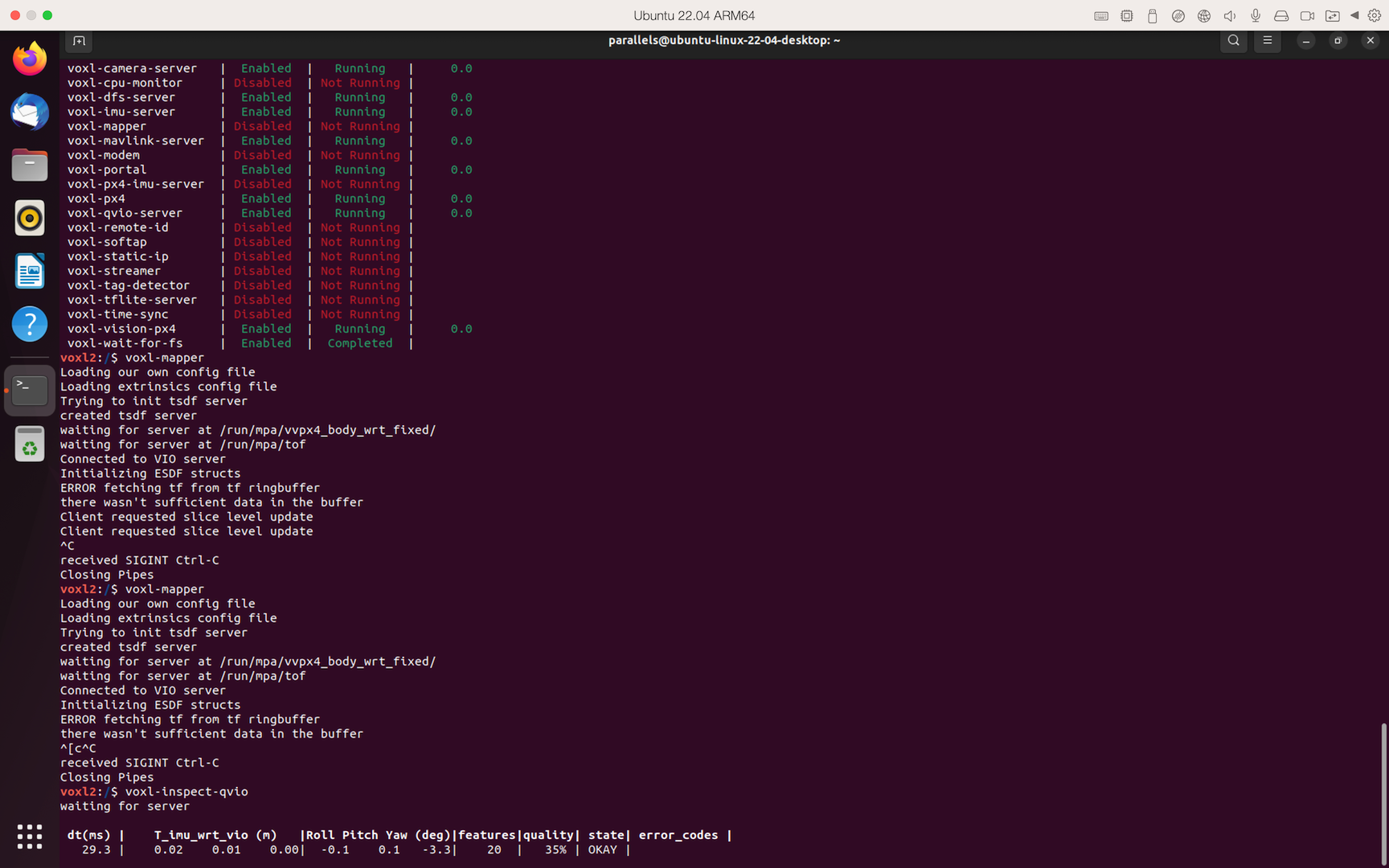
@Jetson-Nano can you upgrade to the most recent SDK please and paste the output of voxl-mapper - if its the ring buffer issue - which TOF are you using?
Also can you confirm the drone is in position mode prior to flight
-
@Jetson-Nano can you upgrade to the most recent SDK please and paste the output of voxl-mapper - if its the ring buffer issue - which TOF are you using?
Also can you confirm the drone is in position mode prior to flight
-
@Zachary-Lowell-0 Does voxl-mapper need a TOF sensor to work properly?
@plub yeah, unless you have other means to get the depth information. see the code: https://gitlab.com/voxl-public/voxl-sdk/services/voxl-mapper/-/blob/master/server/voxl-mapper/voxl_mapper.cc?ref_type=heads#L99
basically you need a depth sensor of sort.
-
@plub said in Voxl-mapper on VOXL2:
@Zachary-Lowell-0 Does voxl-mapper need a TOF sensor to work properly?
1 Reply Last reply a day ago Reply
@plub yes you need a modalAI tof for voxl-mapper to work properly - you can technically get by by using another TOF sensor but then youd personally need to write the code to popuilte the MPA with pointcloud data the the voxl-mapper client is subscribing to.
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login