MAVLink Odometry X Y value 0
-
@Kris in the page, scroll to the bottom
-
@Kris wouldn't hurt to update QGC with the latest
-
@Adrian-Hidalgo Oh, ok sorry.

-
@Kris yeah, that's an older version of QGC. Would recommend updating, could be a mismatch of settings.
After updating, check again local_position_ned
If that doesn't work, try loading platform 1.12 seeker parameters
If that doesn't work, try I'd shift to system_image 3.3.0 to see if that would change it. Be sure to save the data partition when asks to wipe. -
@Adrian-Hidalgo Ok, I will try that.
Thank you so much for helping me with this.
I will post back here with the results. -
@Adrian-Hidalgo Sorry to bother you.
When I started the new version of PX4 v4.2.3 it was ok.
Then I started the Seeker and tons of errors started to happen.[D] at ../../qgroundcontrol/qgroundcontrol/src/QGCApplication.cc:281 - "Settings location "/home/kris/.config/QGroundControl.org/QGroundControl.ini" Is writable?: true" [D] at ../../qgroundcontrol/qgroundcontrol/src/QGCLoggingCategory.cc:120 - "Filter rules "*Log.debug=false\nGStreamerAPILog.debug=true\nqt.qml.connections=false"" [D] at ../../qgroundcontrol/qgroundcontrol/src/QGCApplication.cc:384 - "System reported locale: QLocale(English, Latin, United States) ; Name "en_US" ; Preffered (used in maps): "en-US"" [D] at ../../qgroundcontrol/qgroundcontrol/src/Vehicle/MAVLinkLogManager.cc:360 - "MAVLink logs directory: "/home/kris/Documents/QGroundControl/Logs"" [D] at ../../qgroundcontrol/qgroundcontrol/src/QtLocationPlugin/QGCMapEngine.cpp:164 - "Map Cache in: "/home/kris/.cache/QGCMapCache300" / "qgcMapCache.db"" [D] at qrc:/qml/MainRootWindow.qml:51 - "QGCCorePlugin(0x55bb212c6fa0) []" [D] at ../../qgroundcontrol/qgroundcontrol/src/MissionManager/MissionController.cc:2371 - "setCurrentPlanViewSeqNum" [D] at ../../qgroundcontrol/qgroundcontrol/src/MissionManager/MissionController.cc:2371 - "setCurrentPlanViewSeqNum" [E] at ../../qgroundcontrol/qgroundcontrol/src/VideoReceiver/GstVideoReceiver.cc:284 - "Stop called on empty URI" [E] at ../../qgroundcontrol/qgroundcontrol/src/VideoReceiver/GstVideoReceiver.cc:284 - "Stop called on empty URI" [D] at ../../qgroundcontrol/qgroundcontrol/src/MissionManager/MissionController.cc:1272 - "_recalcFlightPathSegments homePositionValid false" [D] at ../../qgroundcontrol/qgroundcontrol/src/MissionManager/MissionController.cc:1272 - "_recalcFlightPathSegments homePositionValid false" [D] at ../../qgroundcontrol/qgroundcontrol/src/QGCApplication.cc:848 - ""v4.2.0"" [!] at :0 - "Unable to start the client: "org.freedesktop.DBus.Error.AccessDenied" "Geolocation disabled for UID 1000"" [E] at ../../qgroundcontrol/qgroundcontrol/src/PositionManager/PositionManager.cpp:188 - "QGCPositionManager error 0" [D] at ../../qgroundcontrol/qgroundcontrol/src/comm/UDPLink.cc:205 - "Adding target QHostAddress("192.168.110.152") 14550" [D] at ../../qgroundcontrol/qgroundcontrol/src/MissionManager/MissionController.cc:1272 - "_recalcFlightPathSegments homePositionValid false" [D] at ../../qgroundcontrol/qgroundcontrol/src/MissionManager/MissionController.cc:2371 - "setCurrentPlanViewSeqNum" [D] at ../../qgroundcontrol/qgroundcontrol/src/MissionManager/MissionController.cc:2371 - "setCurrentPlanViewSeqNum" [D] at ../../qgroundcontrol/qgroundcontrol/src/MissionManager/MissionController.cc:1272 - "_recalcFlightPathSegments homePositionValid false" [D] at ../../qgroundcontrol/qgroundcontrol/src/MissionManager/MissionController.cc:1272 - "_recalcFlightPathSegments homePositionValid false" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" [I] at ../../qgroundcontrol/qgroundcontrol/src/FactSystem/ParameterManager.cc:829 - "Attemping load from cache" [I] at ../../qgroundcontrol/qgroundcontrol/src/FactSystem/ParameterManager.cc:919 - "Parameters cache match failed /home/kris/.config/QGroundControl.org/ParamCache/1_1.v2" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" [E] at ../../qgroundcontrol/qgroundcontrol/src/comm/UDPLink.cc:167 - "Error writing to QHostAddress("192.168.110.152") 14550" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" [E] at ../../qgroundcontrol/qgroundcontrol/src/comm/UDPLink.cc:167 - "Error writing to QHostAddress("192.168.110.152") 14550" [E] at ../../qgroundcontrol/qgroundcontrol/src/comm/UDPLink.cc:167 - "Error writing to QHostAddress("192.168.110.152") 14550" [E] at ../../qgroundcontrol/qgroundcontrol/src/comm/UDPLink.cc:167 - "Error writing to QHostAddress("192.168.110.152") 14550" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" [E] at ../../qgroundcontrol/qgroundcontrol/src/comm/UDPLink.cc:167 - "Error writing to QHostAddress("192.168.110.152") 14550" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" [E] at ../../qgroundcontrol/qgroundcontrol/src/comm/UDPLink.cc:167 - "Error writing to QHostAddress("192.168.110.152") 14550" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" -
The errors are continuous and eventually everything freezes. When QGC finally closes, I lose my internet connection on my host PC.
I dont know what's going on.
Maybe its because of the settings from voxl... -
@Kris before turning on the Seeker, QGC works fine? Are you able to navigate around the gui?
Hmm...You could try deleting the px4 parameters that were loaded onto the voxl. You'll have to calibrate all the sensors and load the correct parameters if you do choose to go this route.
It kinda seems like there's something with the obstacle avoidance. May first want to try disabling en_voa in vvpx4 (marking it false) as well as disabling dfs server before deleting px4 parameters -
I think Kris is printing out errors from QGC, which we do not have any influence of
The original issue was that PX4 is not incorporating VIO data.
For that, please try the parameters recommended for Seeker
Here are the default Seeker parameters for PX4 1.11:
-
@Adrian-Hidalgo @Chad-Sweet , Thank you.
I reverted back to v4.0.11 and QGC loaded normally with the drone.Maybe when I removed the QGC the first time and installed the newest version v4.2.3, I might have done it wrong.
I am researching into it now. I will try again soon with the v4.2.3
Any ideas on what is wrong?
-
@Adrian-Hidalgo yes, v4.2.3 was working fine before turning on the drone. As soon as I turned it on, the drone connected then disconnected a couple of times. finally disconnecting and eventually freezing PX4.
-
@Adrian-Hidalgo @Chad-Sweet
Ok, I got PX4 v4.2.3 to work.
The Odometry and the LOCAL_POSITION_NED are still reading 0 value for x and y.
So, I will try to restart some services in voxl. -
If voxl-inspect-qvio is showing good VIO data, there should be no need to change things on VOXL. the VOXL services are working properly.
You are most likely having issues with PX4 which runs on Flight Core. Please load the parameter files recommended and report back the result.
-
@Chad-Sweet I tried loading those two files again, but they are the same as what I already have loaded in PX4.
I got this message for both of the files (Seeker_v1_param_rev_A) and (ekf2_indoor_vio). -
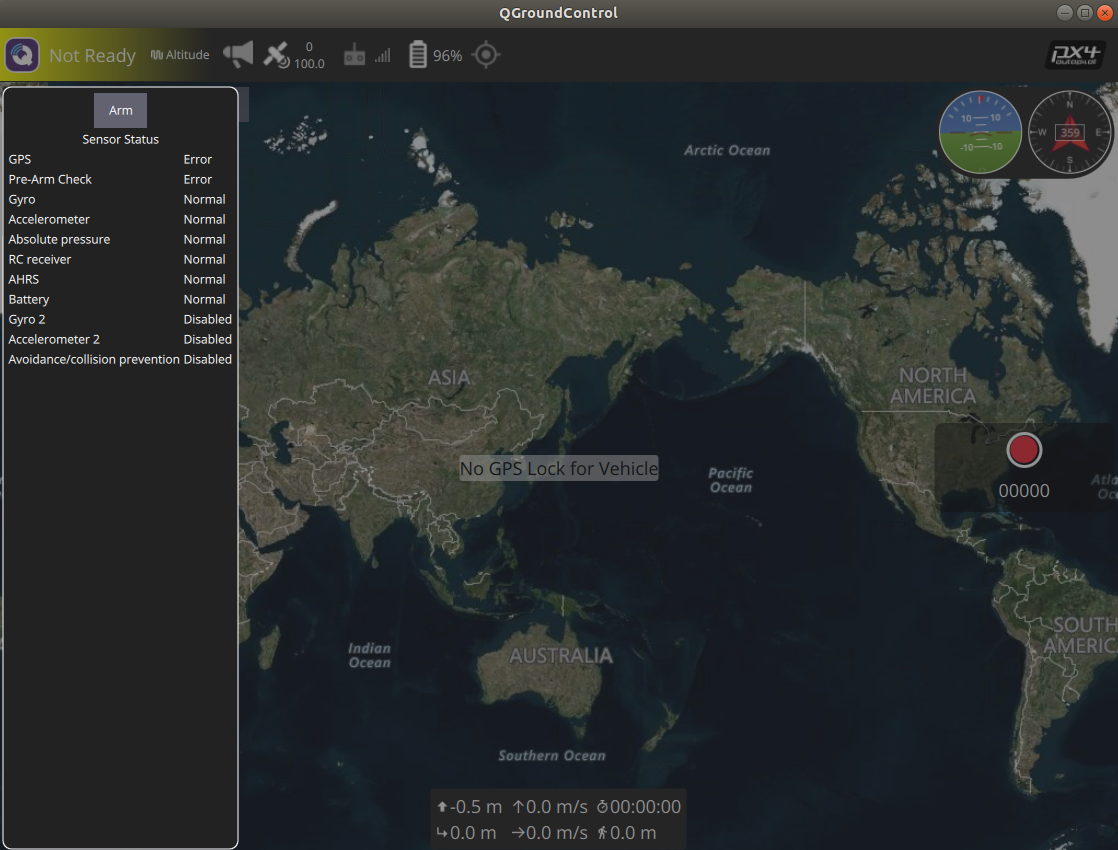
@Chad-Sweet
PX4 Sensor Status
-
I suppose I can disable voa and only have vio enabled in voxl-vision-px4.conf file and see if that gets the vio to work.
-
@Chad-Sweet
I think the QVIO data looks a little blurry on the right side.
Could this be the cause?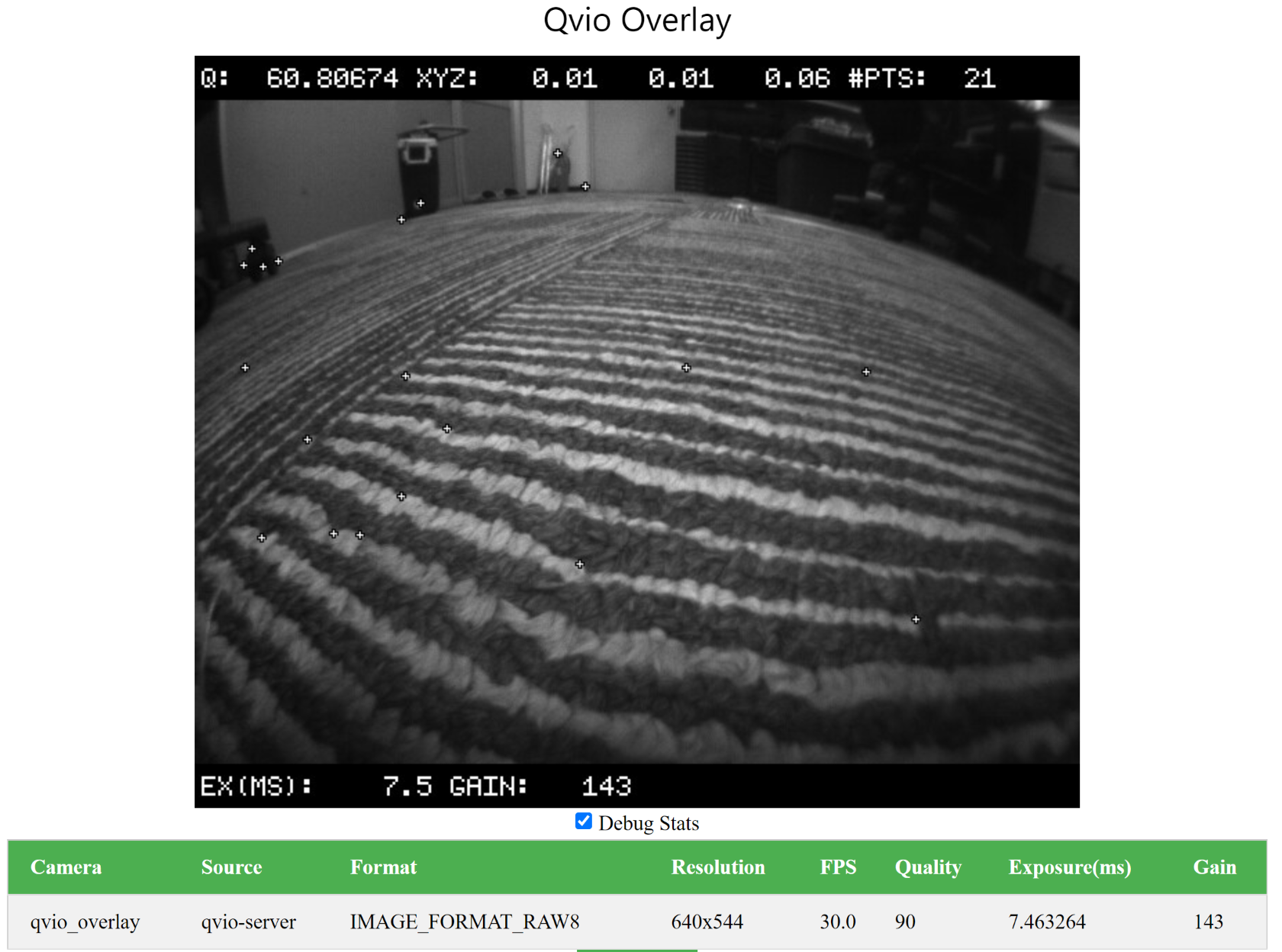
-
@Chad-Sweet
I ran the commandvoxl-inspect-cam qvioand these are the results.| Pipe Name |size(bytes)| height | width |exposure(ms)| gain | frame id |latency(ms)|Framt ERROR: received unreasonably large camera frame size ERROR: received unreasonably large camera frame size ERROR: received unreasonably large camera frame size ERROR: received unreasonably large camera frame size ERROR: only read 1520 bytes of data, expected 983401498 ERROR: only read 1520 bytes of data, expected 983149407 ERROR: only read 1520 bytes of data, expected 983930947 ERROR: received unreasonably large camera frame size ERROR: received unreasonably large camera frame size ERROR: received unreasonably large camera frame size ERROR: received unreasonably large camera frame size ERROR: received unreasonably large camera frame size ERROR: received unreasonably large camera frame size ERROR: received unreasonably large camera frame size ERROR: received unreasonably large camera frame size ERROR: received unreasonably large camera frame size ERROR: received unreasonably large camera frame size ERROR: received unreasonably large camera frame size ERROR: received unreasonably large camera frame size ERROR: only read 1520 bytes of data, expected 983422103 ERROR: received unreasonably large camera frame size ERROR: only read 1520 bytes of data, expected 983595126 ERROR: received unreasonably large camera frame size ERROR: received unreasonably large camera frame size ERROR: received unreasonably large camera frame size ERROR: received unreasonably large camera frame size ERROR: received unreasonably large camera frame size ERROR: received unreasonably large camera frame size ERROR: received unreasonably large camera frame size ERROR: received unreasonably large camera frame size ERROR: received unreasonably large camera frame size ERROR: received unreasonably large camera frame size ERROR: received unreasonably large camera frame size ERROR: received unreasonably large camera frame size ERROR: received unreasonably large camera frame size ERROR: received unreasonably large camera frame size ERROR: received unreasonably large camera frame size ERROR: only read 1520 bytes of data, expected 983464840 ERROR: received unreasonably large camera frame size ERROR: received unreasonably large camera frame size ERROR: received unreasonably large camera frame size ERROR: received unreasonably large camera frame size ERROR: only read 1520 bytes of data, expected 983415196 ERROR: received unreasonably large camera frame size ERROR: received unreasonably large camera frame size ERROR: received unreasonably large camera frame size ERROR: received unreasonably large camera frame size ERROR: only read 1520 bytes of data, expected 983527753 ERROR: only read 1520 bytes of data, expected 983349143 ERROR: received unreasonably large camera frame size ERROR: received unreasonably large camera frame size ERROR: received unreasonably large camera frame size ERROR: received unreasonably large camera frame size ERROR: received unreasonably large camera frame size ERROR: only read 1520 bytes of data, expected 983865918 ERROR: received unreasonably large camera frame size ERROR: received unreasonably large camera frame size ERROR: received unreasonably large camera frame size ERROR: received unreasonably large camera frame size ERROR: only read 1520 bytes of data, expected 983142625 ERROR: received unreasonably large camera frame size ERROR: received unreasonably large camera frame size ERROR: received unreasonably large camera frame size ERROR: only read 1520 bytes of data, expected 983727796 ERROR: only read 1520 bytes of data, expected 983669901 ERROR: only read 1520 bytes of data, expected 983405545 ERROR: received unreasonably large camera frame size ERROR: only read 1520 bytes of data, expected 983563131 ERROR: only read 1520 bytes of data, expected 984096255 ERROR: only read 1520 bytes of data, expected 983959335 ERROR: received unreasonably large camera frame size ERROR: only read 1520 bytes of data, expected 983599080 ERROR: only read 1520 bytes of data, expected 983627034 ERROR: received unreasonably large camera frame size ERROR: only read 1520 bytes of data, expected 983492744 ERROR: received unreasonably large camera frame size ERROR: only read 1520 bytes of data, expected 983316928 ERROR: received unreasonably large camera frame size ERROR: received unreasonably large camera frame size ERROR: received unreasonably large camera frame size ERROR: received unreasonably large camera frame size ERROR: only read 1520 bytes of data, expected 983339417 ERROR: received unreasonably large camera frame size ERROR: received unreasonably large camera frame size ERROR: received unreasonably large camera frame size ERROR: received unreasonably large camera frame size ERROR: only read 1520 bytes of data, expected 982167476 ERROR: received unreasonably large camera frame size ERROR: received unreasonably large camera frame size ERROR: only read 1520 bytes of data, expected 983328375 ERROR: only read 1520 bytes of data, expected 982822047 ERROR: only read 1520 bytes of data, expected 982820284 ERROR: received unreasonably large camera frame size ERROR: received unreasonably large camera frame size ERROR: received unreasonably large camera frame size ERROR: only read 1520 bytes of data, expected 982943181 ERROR: received unreasonably large camera frame size ERROR: received unreasonably large camera frame size ERROR: received unreasonably large camera frame size ERROR: only read 1520 bytes of data, expected 983051188 ERROR: received unreasonably large camera frame size ERROR: only read 1520 bytes of data, expected 982898929 ERROR: received unreasonably large camera frame size ERROR: received unreasonably large camera frame size ERROR: received unreasonably large camera frame size ERROR: received unreasonably large camera frame size ERROR: received unreasonably large camera frame size ERROR: only read 1520 bytes of data, expected 983097249 ERROR: received unreasonably large camera frame size ERROR: only read 1520 bytes of data, expected 983276539 ERROR: received unreasonably large camera frame size ERROR: received unreasonably large camera frame size ERROR: received unreasonably large camera frame size ERROR: only read 1520 bytes of data, expected 983529139 ^C received SIGINT Ctrl-C ERROR: only read 896 bytes of data, expected 983179045This is what I get for tracking;
| Pipe Name |size(bytes)| height | width |exposure(ms)| gain | frame id |latency(ms)|Framt | tracking | 307200 | 480 | 640 | 7.50 | 150 | 45466 | 13.5 | 8This is what I get for stereo;
| Pipe Name |size(bytes)| height | width |exposure(ms)| gain | frame id |latency(ms)|Framt | stereo | 614400 | 480 | 640 | 2.92 | 100 | 47266 | 46.3 | 8and this is what I get for tof;
| Pipe Name |size(bytes)| height | width |exposure(ms)| gain | frame id |latency(ms)|Framt | tof | 0 | 0 | 0 | 0.00 | 0 | 0 | 18.1 | 8 ERROR: invalid metadata, magic number=0, expected 1448040524It looks like the problem is coming from the tof right?
So I ran the command
voxl-inspect-tofand was only receiving 0.0 in the values. So I waved my hand back in forth in front of the tof cam (roughly 3 inches away from tof) and 0.2 was the highest value I could get.timestamp(ms)| center point (m) 1979507 | -0.0 0.0 0.2^CHowever the
voxl-inspect-qvioappears to be fine.voxl:~$ voxl-inspect-qvio waiting for server T_imu_wrt_vio (m) |Roll Pitch Yaw (deg)| state| error_code 0.00 -0.00 -0.00| 0.0 -0.0 -0.0| OKAY | 0.00 -0.00 -0.00| -0.0 -0.0 0.0| OKAY | 0.00 0.00 0.00| -0.0 -0.2 0.1| OKAY | 0.00 -0.00 -0.00| -0.0 -0.2 0.1| OKAY | -0.00 -0.00 -0.00| -0.2 0.8 -0.2| OKAY | 0.01 -0.01 -0.00| -0.4 4.1 7.9| OKAY | -0.00 -0.03 0.01| -0.9 -1.3 -10.3| OKAY | 0.01 -0.00 -0.01| 0.0 3.7 -0.6| OKAY | 0.01 -0.00 -0.01| -0.0 3.7 -0.6| OKAY | ^C received SIGINT Ctrl-CI rotated the voxl slightly to the left and to the right to obtain those values.
-
The QVIO overlay looks good, so VIO is working. There is nothing wrong with the image sensor and VOXL setup if VIO is working.
TOF and stereo have nothing to do with VIO.
VIO is publishing valid data, but PX4 is not receiving it for some reason
-
@Chad-Sweet I have been working on putting together some information/data. I will be posting it here soon.