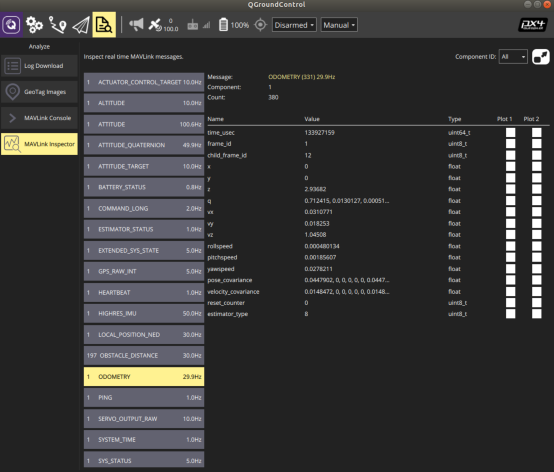
MAVLink Odometry X Y value 0
-
@Kris you could try loading a previous sys-image & sdk. Did it work before updating?
-
@Kris all Seekers get test flown before shipping to validate functionality. They are loaded with VOXL Platform 3.3.0-0.5.0, test flown with px4 platform 1.11 seeker & helper files for seeker ekf_2_indoor & spektrum_dx6e_config.
You can try loading the platform 1.12 seeker to see if that helps -
@Kris select the Q, should say in the menu selection below application settings
I dont see where the version is listed.
Also, this message keeps popping up everytime I open QGC, about a newer version.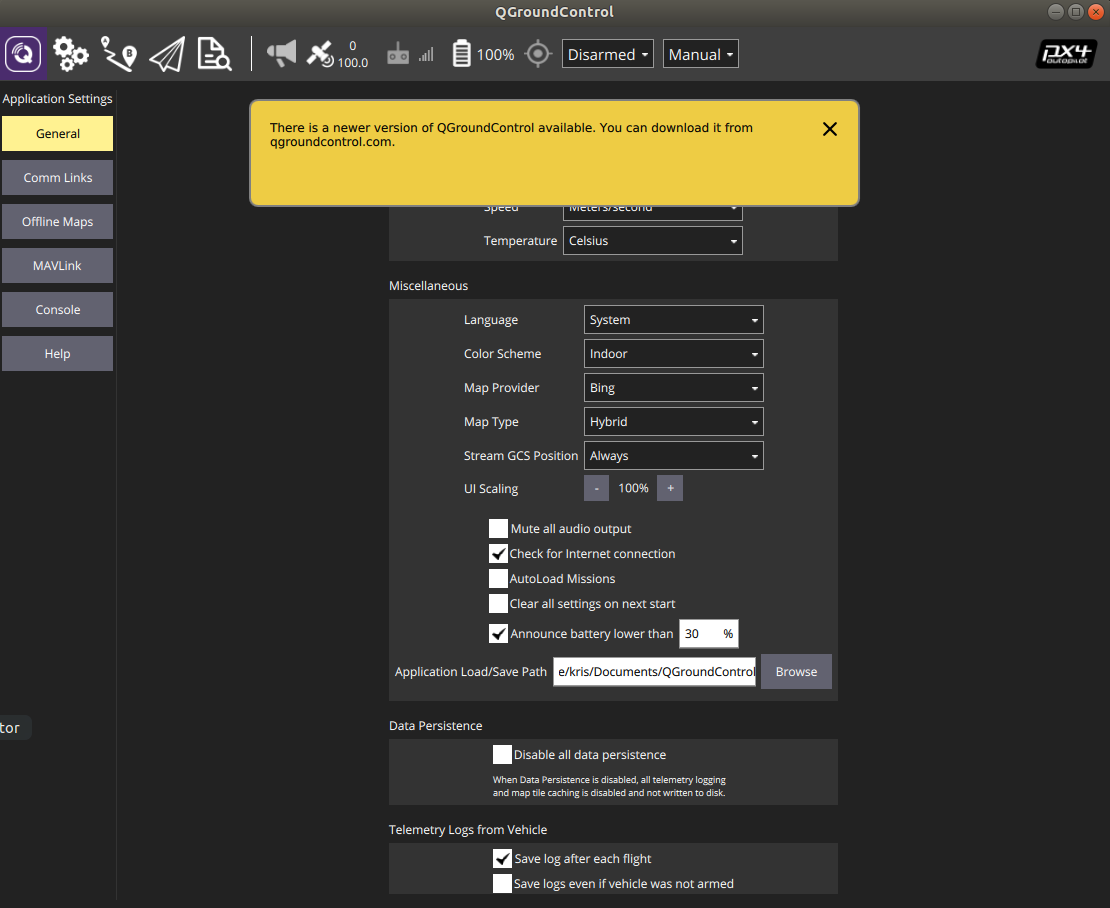
-
I dont see where the version is listed.
Also, this message keeps popping up everytime I open QGC, about a newer version.@Kris in the page, scroll to the bottom
-
I dont see where the version is listed.
Also, this message keeps popping up everytime I open QGC, about a newer version.@Kris wouldn't hurt to update QGC with the latest
-
@Kris in the page, scroll to the bottom
-
@Adrian-Hidalgo Oh, ok sorry.

@Kris yeah, that's an older version of QGC. Would recommend updating, could be a mismatch of settings.
After updating, check again local_position_ned
If that doesn't work, try loading platform 1.12 seeker parameters
If that doesn't work, try I'd shift to system_image 3.3.0 to see if that would change it. Be sure to save the data partition when asks to wipe. -
@Kris yeah, that's an older version of QGC. Would recommend updating, could be a mismatch of settings.
After updating, check again local_position_ned
If that doesn't work, try loading platform 1.12 seeker parameters
If that doesn't work, try I'd shift to system_image 3.3.0 to see if that would change it. Be sure to save the data partition when asks to wipe. -
@Kris yeah, that's an older version of QGC. Would recommend updating, could be a mismatch of settings.
After updating, check again local_position_ned
If that doesn't work, try loading platform 1.12 seeker parameters
If that doesn't work, try I'd shift to system_image 3.3.0 to see if that would change it. Be sure to save the data partition when asks to wipe.@Adrian-Hidalgo Sorry to bother you.
When I started the new version of PX4 v4.2.3 it was ok.
Then I started the Seeker and tons of errors started to happen.[D] at ../../qgroundcontrol/qgroundcontrol/src/QGCApplication.cc:281 - "Settings location "/home/kris/.config/QGroundControl.org/QGroundControl.ini" Is writable?: true" [D] at ../../qgroundcontrol/qgroundcontrol/src/QGCLoggingCategory.cc:120 - "Filter rules "*Log.debug=false\nGStreamerAPILog.debug=true\nqt.qml.connections=false"" [D] at ../../qgroundcontrol/qgroundcontrol/src/QGCApplication.cc:384 - "System reported locale: QLocale(English, Latin, United States) ; Name "en_US" ; Preffered (used in maps): "en-US"" [D] at ../../qgroundcontrol/qgroundcontrol/src/Vehicle/MAVLinkLogManager.cc:360 - "MAVLink logs directory: "/home/kris/Documents/QGroundControl/Logs"" [D] at ../../qgroundcontrol/qgroundcontrol/src/QtLocationPlugin/QGCMapEngine.cpp:164 - "Map Cache in: "/home/kris/.cache/QGCMapCache300" / "qgcMapCache.db"" [D] at qrc:/qml/MainRootWindow.qml:51 - "QGCCorePlugin(0x55bb212c6fa0) []" [D] at ../../qgroundcontrol/qgroundcontrol/src/MissionManager/MissionController.cc:2371 - "setCurrentPlanViewSeqNum" [D] at ../../qgroundcontrol/qgroundcontrol/src/MissionManager/MissionController.cc:2371 - "setCurrentPlanViewSeqNum" [E] at ../../qgroundcontrol/qgroundcontrol/src/VideoReceiver/GstVideoReceiver.cc:284 - "Stop called on empty URI" [E] at ../../qgroundcontrol/qgroundcontrol/src/VideoReceiver/GstVideoReceiver.cc:284 - "Stop called on empty URI" [D] at ../../qgroundcontrol/qgroundcontrol/src/MissionManager/MissionController.cc:1272 - "_recalcFlightPathSegments homePositionValid false" [D] at ../../qgroundcontrol/qgroundcontrol/src/MissionManager/MissionController.cc:1272 - "_recalcFlightPathSegments homePositionValid false" [D] at ../../qgroundcontrol/qgroundcontrol/src/QGCApplication.cc:848 - ""v4.2.0"" [!] at :0 - "Unable to start the client: "org.freedesktop.DBus.Error.AccessDenied" "Geolocation disabled for UID 1000"" [E] at ../../qgroundcontrol/qgroundcontrol/src/PositionManager/PositionManager.cpp:188 - "QGCPositionManager error 0" [D] at ../../qgroundcontrol/qgroundcontrol/src/comm/UDPLink.cc:205 - "Adding target QHostAddress("192.168.110.152") 14550" [D] at ../../qgroundcontrol/qgroundcontrol/src/MissionManager/MissionController.cc:1272 - "_recalcFlightPathSegments homePositionValid false" [D] at ../../qgroundcontrol/qgroundcontrol/src/MissionManager/MissionController.cc:2371 - "setCurrentPlanViewSeqNum" [D] at ../../qgroundcontrol/qgroundcontrol/src/MissionManager/MissionController.cc:2371 - "setCurrentPlanViewSeqNum" [D] at ../../qgroundcontrol/qgroundcontrol/src/MissionManager/MissionController.cc:1272 - "_recalcFlightPathSegments homePositionValid false" [D] at ../../qgroundcontrol/qgroundcontrol/src/MissionManager/MissionController.cc:1272 - "_recalcFlightPathSegments homePositionValid false" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" [I] at ../../qgroundcontrol/qgroundcontrol/src/FactSystem/ParameterManager.cc:829 - "Attemping load from cache" [I] at ../../qgroundcontrol/qgroundcontrol/src/FactSystem/ParameterManager.cc:919 - "Parameters cache match failed /home/kris/.config/QGroundControl.org/ParamCache/1_1.v2" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" [E] at ../../qgroundcontrol/qgroundcontrol/src/comm/UDPLink.cc:167 - "Error writing to QHostAddress("192.168.110.152") 14550" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" [E] at ../../qgroundcontrol/qgroundcontrol/src/comm/UDPLink.cc:167 - "Error writing to QHostAddress("192.168.110.152") 14550" [E] at ../../qgroundcontrol/qgroundcontrol/src/comm/UDPLink.cc:167 - "Error writing to QHostAddress("192.168.110.152") 14550" [E] at ../../qgroundcontrol/qgroundcontrol/src/comm/UDPLink.cc:167 - "Error writing to QHostAddress("192.168.110.152") 14550" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" [E] at ../../qgroundcontrol/qgroundcontrol/src/comm/UDPLink.cc:167 - "Error writing to QHostAddress("192.168.110.152") 14550" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" [E] at ../../qgroundcontrol/qgroundcontrol/src/comm/UDPLink.cc:167 - "Error writing to QHostAddress("192.168.110.152") 14550" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" [E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments" -
@Kris before turning on the Seeker, QGC works fine? Are you able to navigate around the gui?
Hmm...You could try deleting the px4 parameters that were loaded onto the voxl. You'll have to calibrate all the sensors and load the correct parameters if you do choose to go this route.
It kinda seems like there's something with the obstacle avoidance. May first want to try disabling en_voa in vvpx4 (marking it false) as well as disabling dfs server before deleting px4 parameters -
I think Kris is printing out errors from QGC, which we do not have any influence of
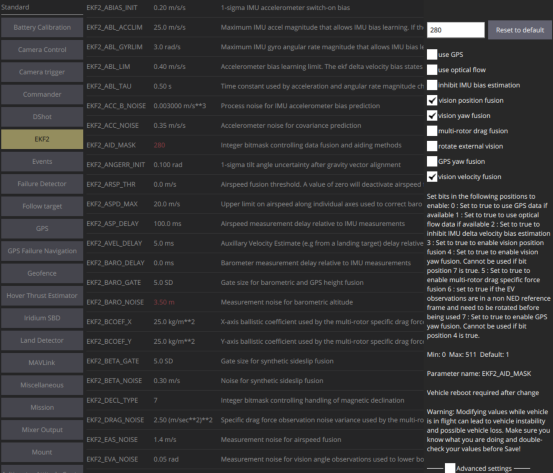
The original issue was that PX4 is not incorporating VIO data.
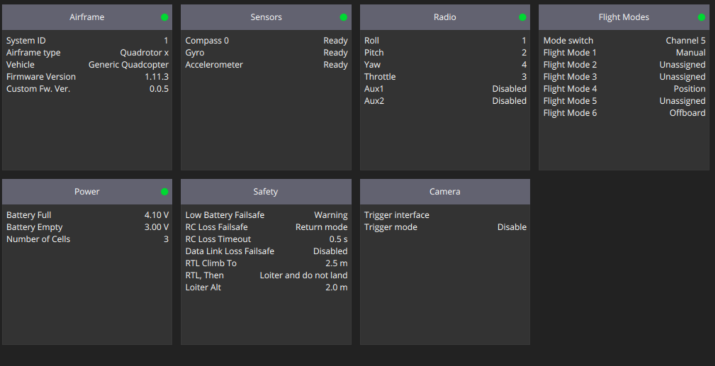
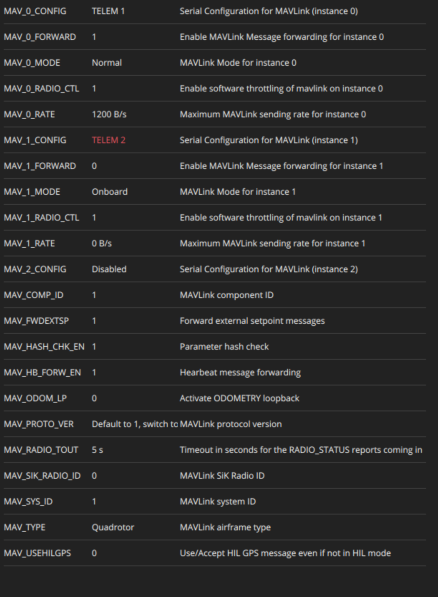
For that, please try the parameters recommended for Seeker
Here are the default Seeker parameters for PX4 1.11:
-
@Adrian-Hidalgo @Chad-Sweet , Thank you.
I reverted back to v4.0.11 and QGC loaded normally with the drone.Maybe when I removed the QGC the first time and installed the newest version v4.2.3, I might have done it wrong.
I am researching into it now. I will try again soon with the v4.2.3
Any ideas on what is wrong?
-
@Kris before turning on the Seeker, QGC works fine? Are you able to navigate around the gui?
Hmm...You could try deleting the px4 parameters that were loaded onto the voxl. You'll have to calibrate all the sensors and load the correct parameters if you do choose to go this route.
It kinda seems like there's something with the obstacle avoidance. May first want to try disabling en_voa in vvpx4 (marking it false) as well as disabling dfs server before deleting px4 parameters -
@Adrian-Hidalgo @Chad-Sweet
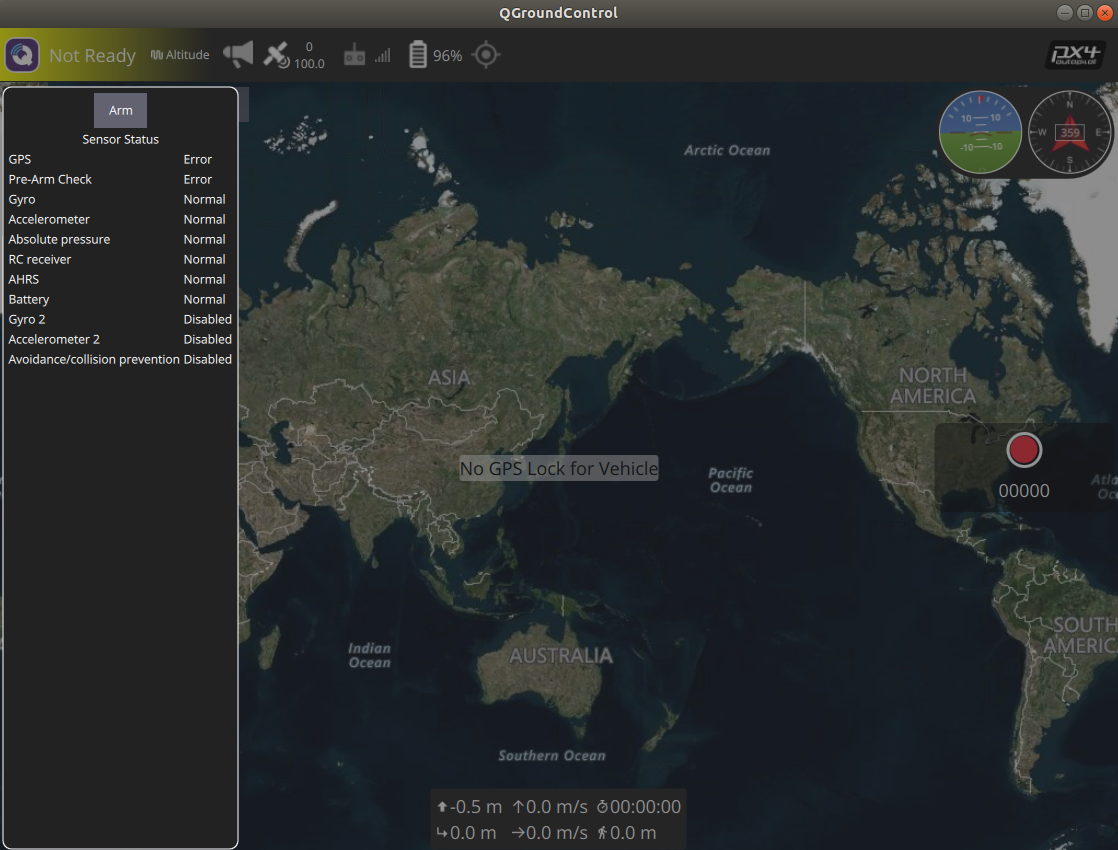
Ok, I got PX4 v4.2.3 to work.
The Odometry and the LOCAL_POSITION_NED are still reading 0 value for x and y.
So, I will try to restart some services in voxl. -
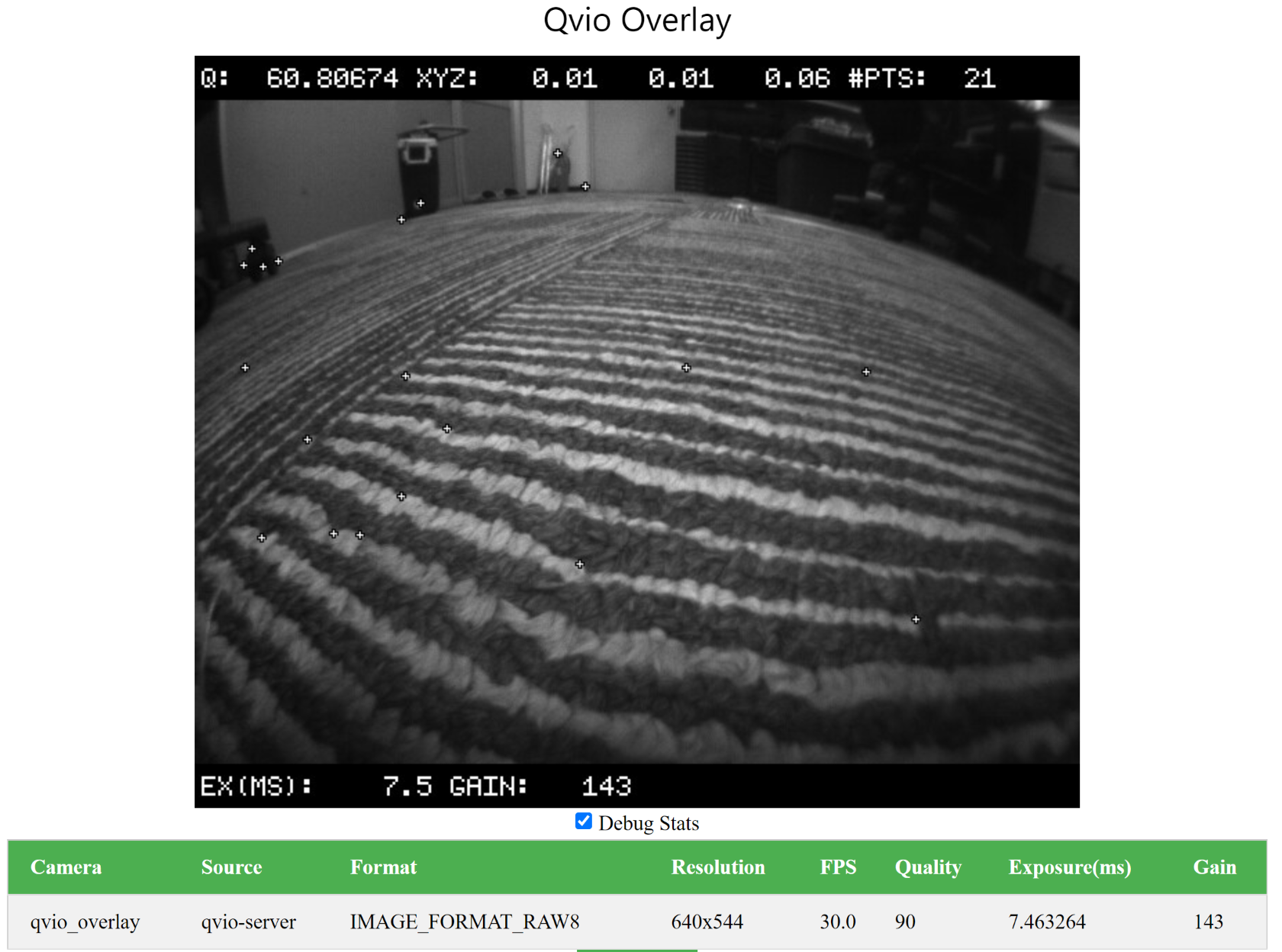
If voxl-inspect-qvio is showing good VIO data, there should be no need to change things on VOXL. the VOXL services are working properly.
You are most likely having issues with PX4 which runs on Flight Core. Please load the parameter files recommended and report back the result.
-
If voxl-inspect-qvio is showing good VIO data, there should be no need to change things on VOXL. the VOXL services are working properly.
You are most likely having issues with PX4 which runs on Flight Core. Please load the parameter files recommended and report back the result.
-
If voxl-inspect-qvio is showing good VIO data, there should be no need to change things on VOXL. the VOXL services are working properly.
You are most likely having issues with PX4 which runs on Flight Core. Please load the parameter files recommended and report back the result.
-
If voxl-inspect-qvio is showing good VIO data, there should be no need to change things on VOXL. the VOXL services are working properly.
You are most likely having issues with PX4 which runs on Flight Core. Please load the parameter files recommended and report back the result.
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login