@Eric-Katzfey
I had backed up my ROS workspace using adb pull before flashing the drone and used adb push to reinstate my workspace on the drone. This unfortunately changed up the file permissions for the folders within the workspace.
I was able to fix this by deleting (using rm -rf) all folders within my ROS workspace except the src (which contains the packages I was working on) and building the packages again.
I was then faced with the other CMake error visible above -
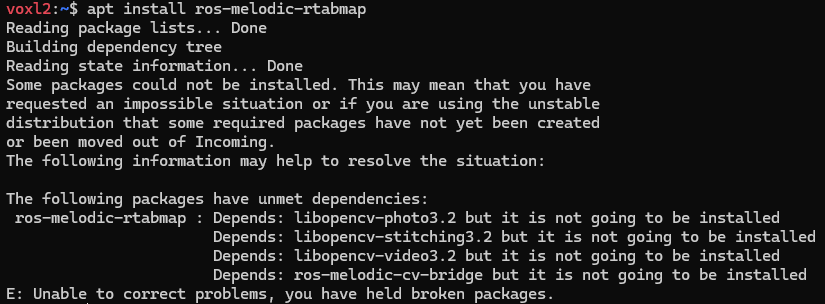
@Prabhav-Gupta said in Unable to build ROS python workspace on the RB5 drone:
CMake Error at /home/root/python_ws/src/vision_opencv/cv_bridge/CMakeLists.txt:16 (find_package):
Could not find a package configuration file provided by "OpenCV" (requested
version 3) with any of the following names:
OpenCVConfig.cmake
opencv-config.cmake
I fixed this by building opencv from source on the drone (following this - https://docs.opencv.org/4.x/d7/d9f/tutorial_linux_install.html)
After installing opencv, the catrkin build did not return any errors at the time. I do need to check whether my ROS Nodes are working as expected or not. Will update here once I do the same.
Thank you for your time!
Thanks for the answer, yes I already looked into the code. I was just wondering why the servers timestamp differs from the system timestamp. But then I will change the node accordingly.
@Isabella-Yu,
If there is no tflite_data pipe, you may be using a version of voxl-tflite-server that does not have the ai_detection_t added yet. This feature was added in v0.2.0, so make sure you are using the latest available version!
Hi @gauravshukla914 ,
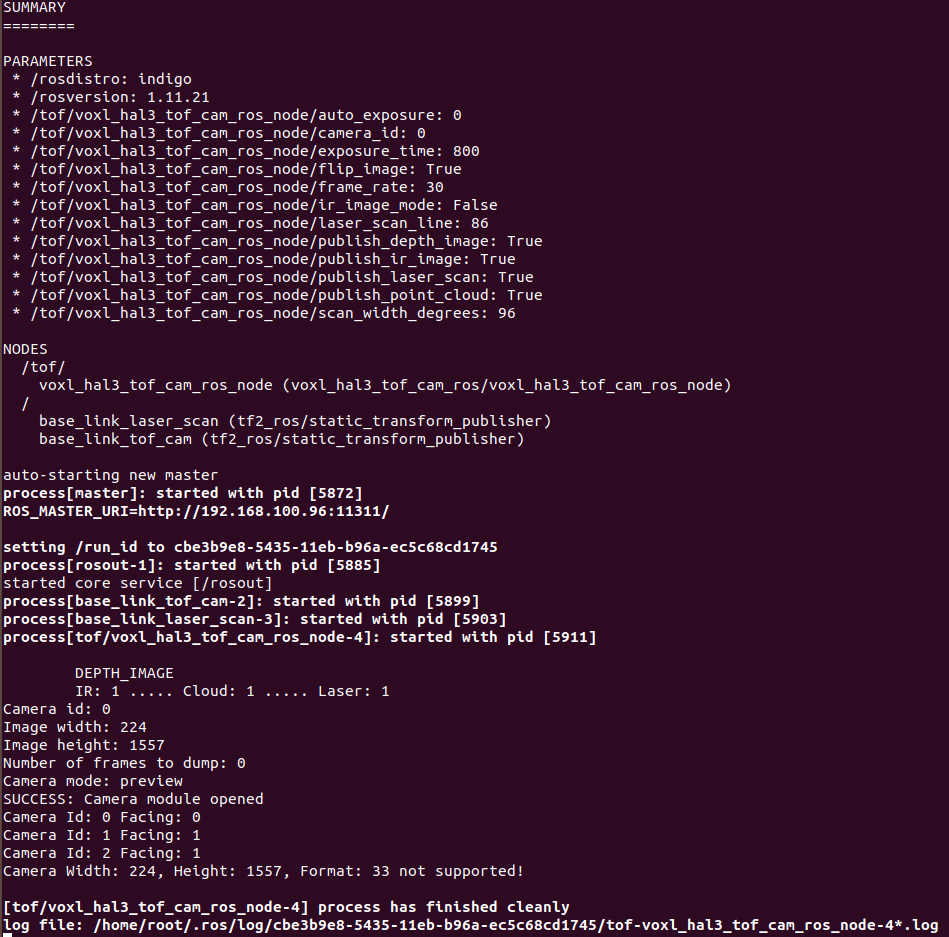
Thanks for the help with this. We've released a new beta version of the voxl-hal3-tof-cam-ros that supports auto detection of ToF and defaults the persist.camera.modalai.tof setting properly.
It will be in out next voxl-suite release, but is available from our dev channel here if you are interested in using this link
The updated readme is here.
Thanks!