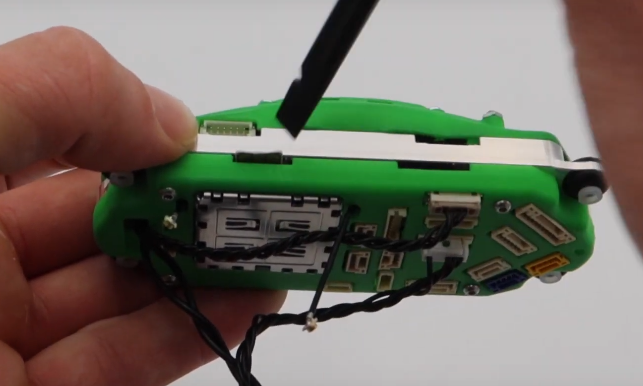
The tracking camera calibration worked flawlessly after using the seeker in softAP mode, disabling the dfs-server and using the correct checkboard.
Stereo camera calibration was much harder, and after many attempts there was always a failure in the exstrinsics calibration.
We configured /etc/modalai/extrinsics.conf following this guide https://docs.modalai.com/configure-extrinsics/ .
We tried manual control with Position flight mode and it worked fine. After we tried two simple autonomous flights with mavsdk inside docker, mainly using the set_position_ned() method.
http://mavsdk-python-docs.s3-website.eu-central-1.amazonaws.com/plugins/offboard.html#mavsdk.offboard.Offboard.set_position_ned
First mission: arm the drone, take off 1m from the ground, move forward 1.8m and then land.
This one ended pretty badly, with a drone crash. Mission was not followed at all.
The environment was an office sufficiently illuminated, and the Seeker drone started from the position where it was turned on.
Second mission (simpler): arm the drone, take off 1m from the ground, land.
In this one the drone took off around 2.5m from the ground, and then landed with relatively high speed, hitting the ground.
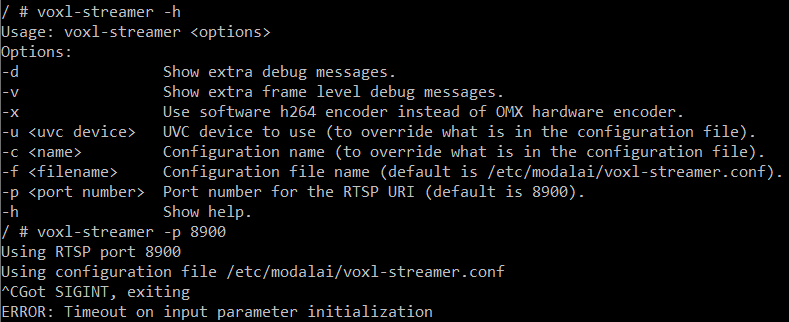
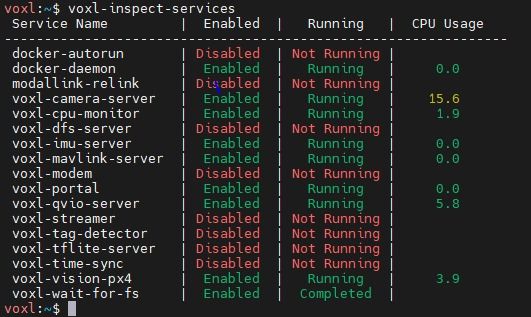
I don't know if it can be an issue but in both tests dfs-server was disabled.