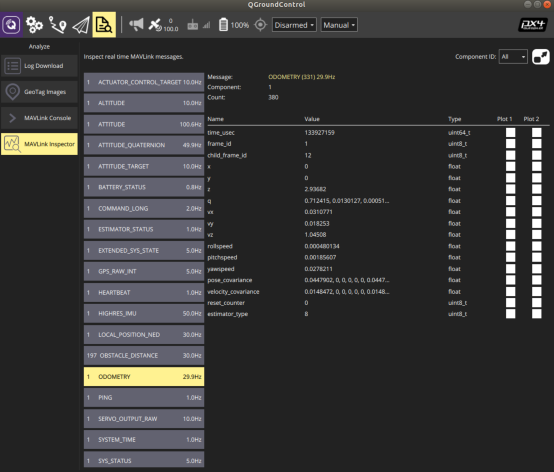
MAVLink Odometry X Y value 0
-
If you are using PX4 1.12 or later, and do not have a magnetometer, and want to use VIO, yes.
-
If you are using PX4 1.12 or later, and do not have a magnetometer, and want to use VIO, yes.
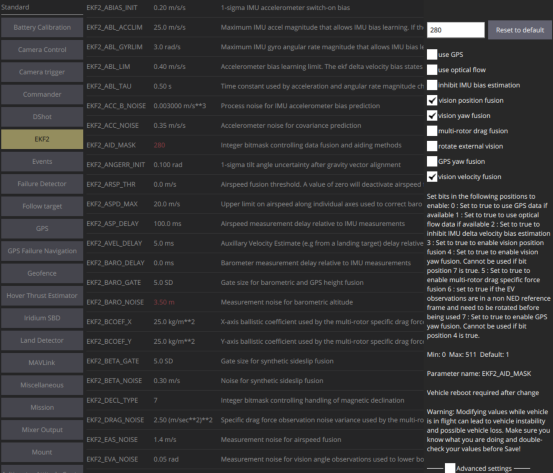
@Chad-Sweet I selected "None" for the EKF2_MAG_TYPE and entered "0" for the SYS_HAS_MAG.
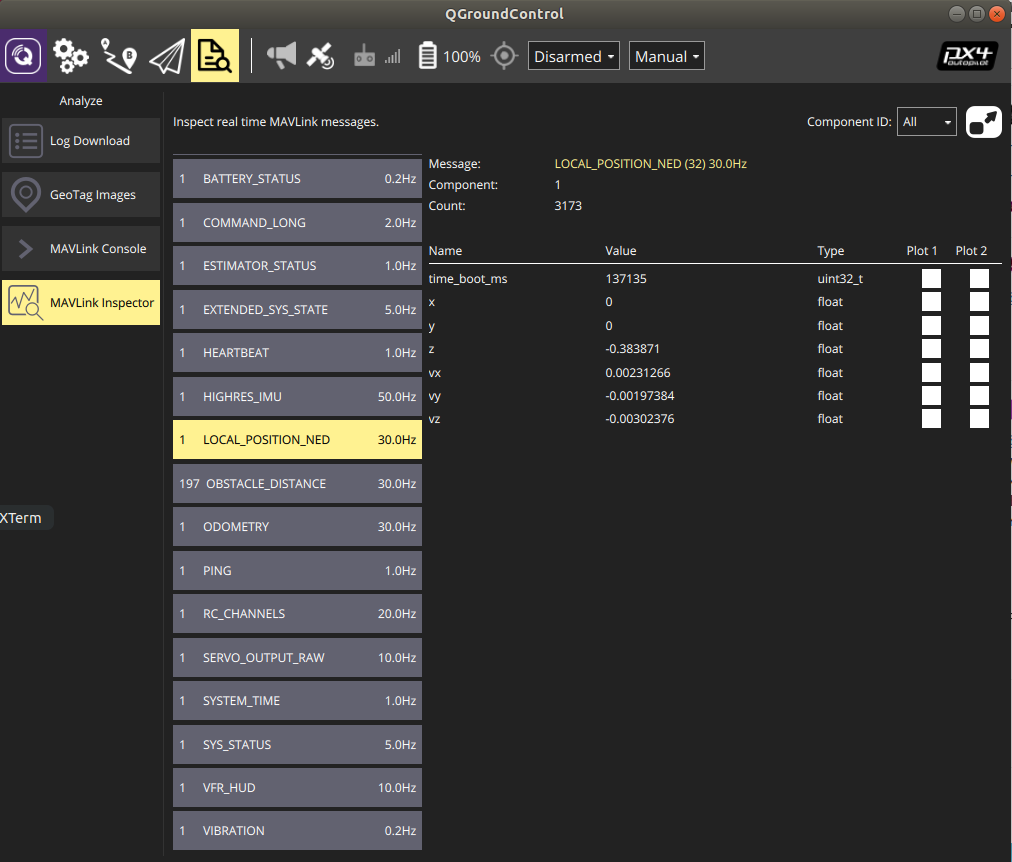
The Odometry x y values are still at 0.
Do I need to change anything in my voxl-vision-px4.conf files now that I am not using a GPS?"config_file_version": 1, "qgc_ip": "192.168.110.146", "en_secondary_qgc": false, "secondary_qgc_ip": "192.168.1.214", "qgc_udp_port_number": 14550, "udp_mtu": 512, "en_localhost_mavlink_udp": true, "localhost_udp_port_number": 14551, "vio_pipe": "qvio", "en_vio": true, "en_send_vio_to_qgc": true, "en_reset_vio_if_initialized_inverted": true, "vio_warmup_s": 3, "en_set_clock_from_gps": true, "en_force_onboard_mav1_mode": true, "en_reset_px4_on_error": true, "horizon_cal_tolerance": 0.449999988079071, "offboard_mode": "trajectory", "follow_tag_id": 0, "figure_eight_move_home": true, "en_tag_fixed_frame": false, "fixed_frame_filter_len": 5, "en_transform_mavlink_pos_setpoints_from_fixed_frame": false, "en_voa": true, "en_send_voa_to_qgc": true, "voa_upper_bound_m": -0.15000000596046448, "voa_lower_bound_m": 0.15000000596046448, "voa_memory_s": 1, "voa_inputs": [{ "enabled": true, "type": "point_cloud", "input_pipe": "dfs_point_cloud", "frame": "stereo_l" }, { "enabled": true, "type": "point_cloud", "input_pipe": "stereo_front_pc", "frame": "stereo_front_l" }, { "enabled": true, "type": "point_cloud", "input_pipe": "stereo_rear_pc", "frame": "stereo_rear_l" }, { "enabled": true, "type": "tof", "input_pipe": "tof", "frame": "tof" }, { "enabled": true, "type": "rangefinder", "input_pipe": "rangefinders", "frame": "body" }] }Should I just unplug the Cirocomm GPS?
-
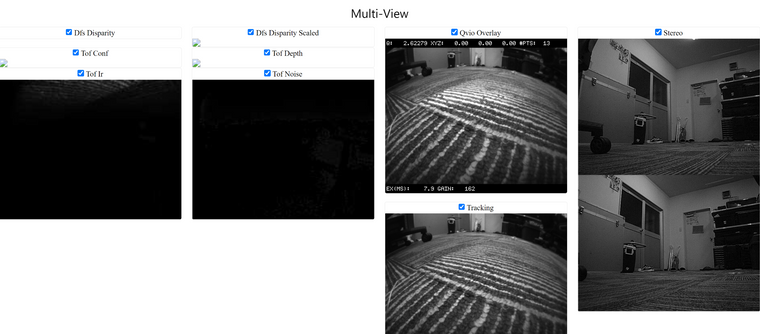
If voxl-inspect-qvio shows functioning VIO data, there is no need to calibrate cameras. VIO is working. PX4 is most likely misconfigured.
If you have a GPS, then you likely have a magnetometer?
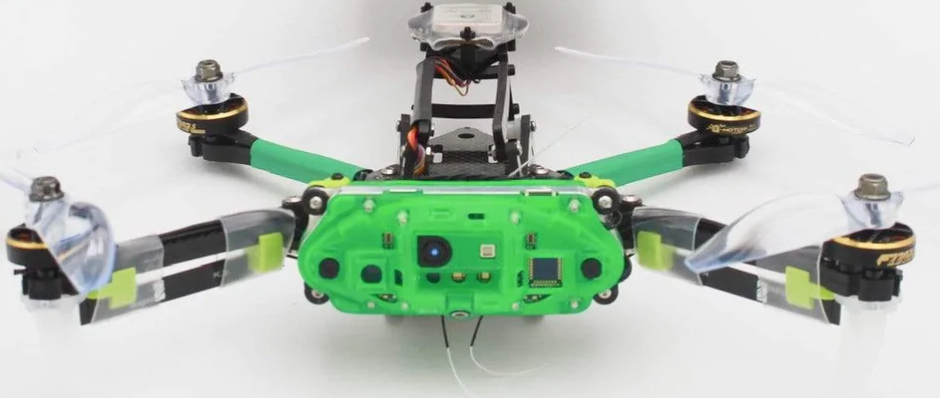
Seeker should have arrived pre-configured for VIO flight. No need to change anything. VIO is flight tested for 20 minutes before being shipped.
-
If voxl-inspect-qvio shows functioning VIO data, there is no need to calibrate cameras. VIO is working. PX4 is most likely misconfigured.
If you have a GPS, then you likely have a magnetometer?
Seeker should have arrived pre-configured for VIO flight. No need to change anything. VIO is flight tested for 20 minutes before being shipped.
-
If voxl-inspect-qvio shows functioning VIO data, there is no need to calibrate cameras. VIO is working. PX4 is most likely misconfigured.
If you have a GPS, then you likely have a magnetometer?
Seeker should have arrived pre-configured for VIO flight. No need to change anything. VIO is flight tested for 20 minutes before being shipped.
@Chad-Sweet
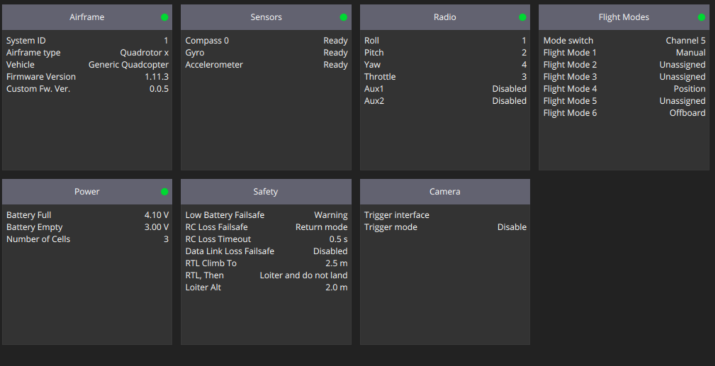
Yes, I have this GPS/Magnetometer that is on the back of the Seeker above the battery compartment.
If my PX4 is possibly misconfigured, should I just remove PX4 and start clean?
Or, is there something you might know that could be causing the problem in PX4? -
-
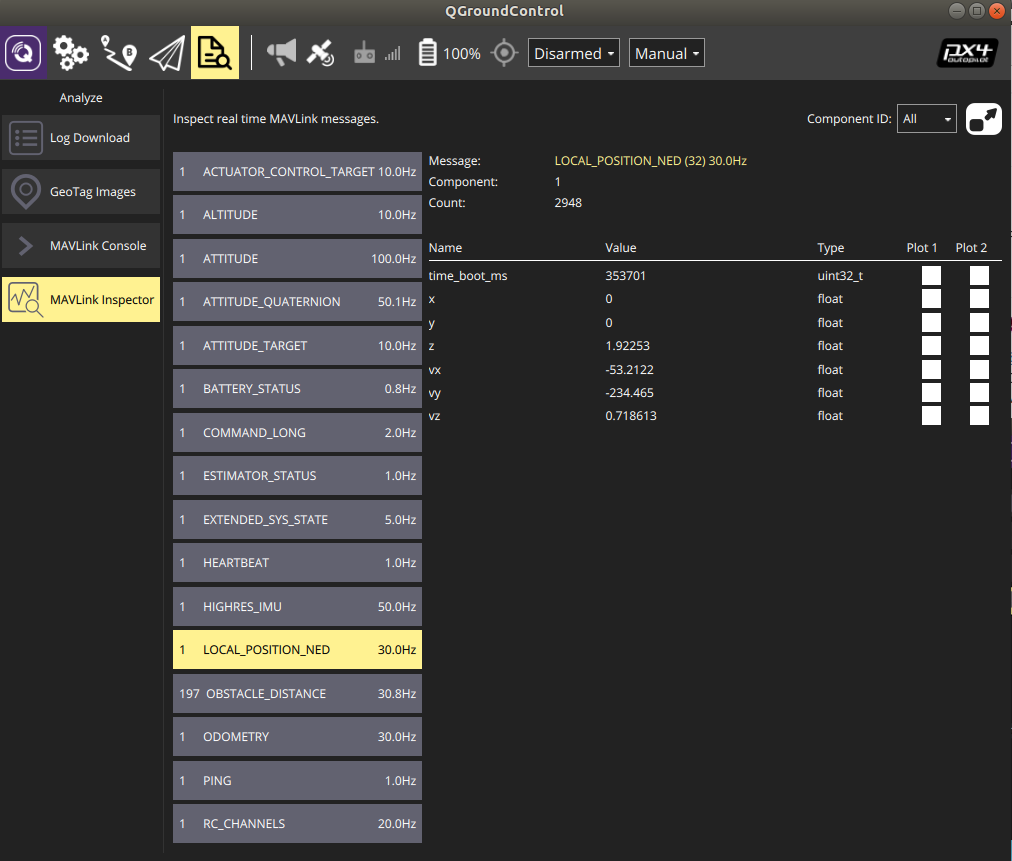
@Kris Can you post a pic of QGC under MavLink Inspector, go to the tab that says Local_Position_Ned and see what the X, Y, Z show. I want to verify how those numbers are numerating.
Normally if the X & Y are zeroed out, VIO hasn't started yet or has blown up. A power-cycle can fix this, but I would think you've already attempted that. Looks like you've already attempted resetting voxl-vision-px4 & qvio.
You may want to try reconfiguring mpa:voxl-configure-mpa -p -f seeker -b blue -c 7 --fc yesPower-cycle afterwards. You'll have to set your qgc-ip again since mpa will reset it to factory.
-
@Kris Can you post a pic of QGC under MavLink Inspector, go to the tab that says Local_Position_Ned and see what the X, Y, Z show. I want to verify how those numbers are numerating.
Normally if the X & Y are zeroed out, VIO hasn't started yet or has blown up. A power-cycle can fix this, but I would think you've already attempted that. Looks like you've already attempted resetting voxl-vision-px4 & qvio.
You may want to try reconfiguring mpa:voxl-configure-mpa -p -f seeker -b blue -c 7 --fc yesPower-cycle afterwards. You'll have to set your qgc-ip again since mpa will reset it to factory.
-
@Kris Can you post a pic of QGC under MavLink Inspector, go to the tab that says Local_Position_Ned and see what the X, Y, Z show. I want to verify how those numbers are numerating.
Normally if the X & Y are zeroed out, VIO hasn't started yet or has blown up. A power-cycle can fix this, but I would think you've already attempted that. Looks like you've already attempted resetting voxl-vision-px4 & qvio.
You may want to try reconfiguring mpa:voxl-configure-mpa -p -f seeker -b blue -c 7 --fc yesPower-cycle afterwards. You'll have to set your qgc-ip again since mpa will reset it to factory.
-
@Kris Can you post a pic of QGC under MavLink Inspector, go to the tab that says Local_Position_Ned and see what the X, Y, Z show. I want to verify how those numbers are numerating.
Normally if the X & Y are zeroed out, VIO hasn't started yet or has blown up. A power-cycle can fix this, but I would think you've already attempted that. Looks like you've already attempted resetting voxl-vision-px4 & qvio.
You may want to try reconfiguring mpa:voxl-configure-mpa -p -f seeker -b blue -c 7 --fc yesPower-cycle afterwards. You'll have to set your qgc-ip again since mpa will reset it to factory.
-
@Kris Can you post a pic of QGC under MavLink Inspector, go to the tab that says Local_Position_Ned and see what the X, Y, Z show. I want to verify how those numbers are numerating.
Normally if the X & Y are zeroed out, VIO hasn't started yet or has blown up. A power-cycle can fix this, but I would think you've already attempted that. Looks like you've already attempted resetting voxl-vision-px4 & qvio.
You may want to try reconfiguring mpa:voxl-configure-mpa -p -f seeker -b blue -c 7 --fc yesPower-cycle afterwards. You'll have to set your qgc-ip again since mpa will reset it to factory.
@Adrian-Hidalgo @Chad-Sweet , Is there anything else you would like to look at on my end or something else I can try to resolve this issue?
-
-
-
@Kris select the Q, should say in the menu selection below application settings
-
@Kris you could try loading a previous sys-image & sdk. Did it work before updating?
-
@Kris you could try loading a previous sys-image & sdk. Did it work before updating?
-
@Kris all Seekers get test flown before shipping to validate functionality. They are loaded with VOXL Platform 3.3.0-0.5.0, test flown with px4 platform 1.11 seeker & helper files for seeker ekf_2_indoor & spektrum_dx6e_config.
You can try loading the platform 1.12 seeker to see if that helps


Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login