VOXL2/ROS2 Drone Runs Figure 8 Offboard Program Instead of My Program
-
@GlennTee You will want to configure voxl-vision-hub to not send offboard commands if you are trying to use offboard commands from ROS2. Set
offboard_mode: offin the configuration file/etc/modalai/voxl-vision-hub.conf.@Eric-Katzfey Hi again. I just tried flying it again and the drone did not default to running the Figure Eight program this time, but instead it did nothing once I swapped the controller to offboard mode. It did not arm, the props did not spin, or anything like that, but did absolutely nothing. I made sure to set "offboard_mode": "off" in voxl-vision-hub. I've attached a screenshot of my terminal below.
-
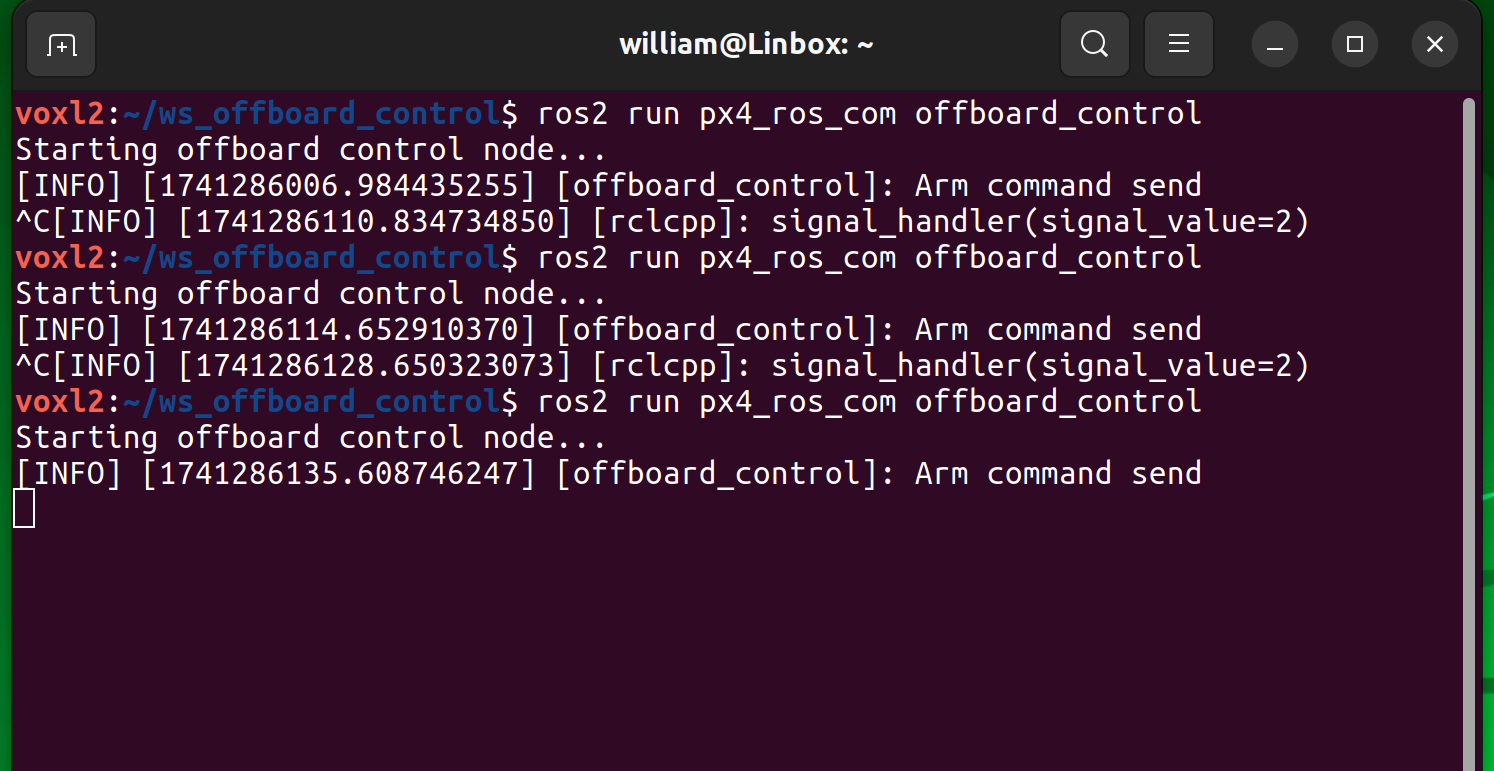
@Eric-Katzfey Hi again. I just tried flying it again and the drone did not default to running the Figure Eight program this time, but instead it did nothing once I swapped the controller to offboard mode. It did not arm, the props did not spin, or anything like that, but did absolutely nothing. I made sure to set "offboard_mode": "off" in voxl-vision-hub. I've attached a screenshot of my terminal below.
@GlennTee Okay, then probably some issue with connectivity between ROS2 and PX4. Doesn't seem like anything from ROS2 is getting to PX4. I'll ask some team members who have some experience with ROS2 what they think.
-
@Eric-Katzfey Hi again. I just tried flying it again and the drone did not default to running the Figure Eight program this time, but instead it did nothing once I swapped the controller to offboard mode. It did not arm, the props did not spin, or anything like that, but did absolutely nothing. I made sure to set "offboard_mode": "off" in voxl-vision-hub. I've attached a screenshot of my terminal below.
@GlennTee So that example requires you have the MicroDDS installed and running to communicate with PX4 (guide here).
Alternatively, you can run offboard commands via mavsdk (example here). If you do it this way, make sure to edit that example to connect on port 14551 and set en_localhost_mavlink_udp to true in 'etc/modalai/voxl-vision-hub.conf'.
Let me know if that helps.
-
@GlennTee So that example requires you have the MicroDDS installed and running to communicate with PX4 (guide here).
Alternatively, you can run offboard commands via mavsdk (example here). If you do it this way, make sure to edit that example to connect on port 14551 and set en_localhost_mavlink_udp to true in 'etc/modalai/voxl-vision-hub.conf'.
Let me know if that helps.
@teddy-zaremba Thank you. I installed MicroDDS and am running the agent in VOXL2. I just enabled it and made sure the necessary services are running, but it looks like I got the same result as before, where nothing would happen after supposedly the Arm command was sent. Is there anything else I could be missing?

-
@teddy-zaremba Thank you. I installed MicroDDS and am running the agent in VOXL2. I just enabled it and made sure the necessary services are running, but it looks like I got the same result as before, where nothing would happen after supposedly the Arm command was sent. Is there anything else I could be missing?
@GlennTee What do you see when you run ros2 topic list?
Have you run "apt-get install voxl-ros2-foxy && apt-get install voxl-mpa-to-ros2" followed by "voxl-configure-mpa-to-ros2".
-
@GlennTee What do you see when you run ros2 topic list?
Have you run "apt-get install voxl-ros2-foxy && apt-get install voxl-mpa-to-ros2" followed by "voxl-configure-mpa-to-ros2".
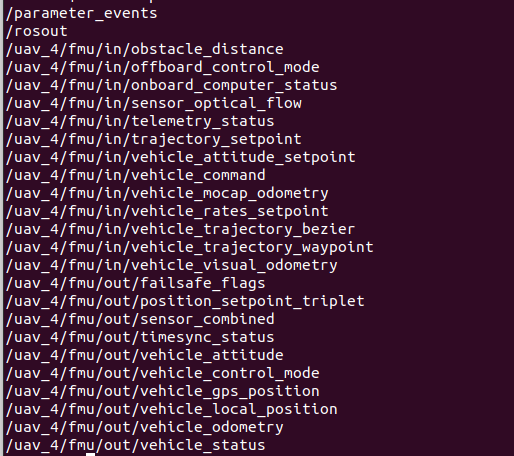
@teddy-zaremba Sorry for the late reply, I've already run both of those commands in that order. This is what comes up when I run "ros2 topic list"
-
@teddy-zaremba Sorry for the late reply, I've already run both of those commands in that order. This is what comes up when I run "ros2 topic list"
@GlennTee the problem lies in a mismatch between the topics which you see using "ros2 topic list" and the publishers from the offboard_control node.
The ros2 node has publishers defined as follows:
OffboardControl() : Node("offboard_control") { offboard_control_mode_publisher_ = this->create_publisher<OffboardControlMode>("/fmu/in/offboard_control_mode", 10); trajectory_setpoint_publisher_ = this->create_publisher<TrajectorySetpoint>("/fmu/in/trajectory_setpoint", 10); vehicle_command_publisher_ = this->create_publisher<VehicleCommand>("/fmu/in/vehicle_command", 10);Do you know where you changed the prefix uav_4?
I can't remember where to configure it.So, you can change the ROS2 code, rebuild and it should work. Or remove the uav_4 prefix
-
@GlennTee the problem lies in a mismatch between the topics which you see using "ros2 topic list" and the publishers from the offboard_control node.
The ros2 node has publishers defined as follows:
OffboardControl() : Node("offboard_control") { offboard_control_mode_publisher_ = this->create_publisher<OffboardControlMode>("/fmu/in/offboard_control_mode", 10); trajectory_setpoint_publisher_ = this->create_publisher<TrajectorySetpoint>("/fmu/in/trajectory_setpoint", 10); vehicle_command_publisher_ = this->create_publisher<VehicleCommand>("/fmu/in/vehicle_command", 10);Do you know where you changed the prefix uav_4?
I can't remember where to configure it.So, you can change the ROS2 code, rebuild and it should work. Or remove the uav_4 prefix
-
@Kessie The good news is that removing the prefix allows the px4 to see the messages and arm. Thank you! The bad news is that we weren't sure this would work so the drone wasn't in our flying lab and we had to physically grab it and disconnect the battery.
We tried powering on the RC controller to push the kill switch, but even though it connected to the receiver, the drone didn't respond to any of the RC controls including the mode and motor disable switches.
How do we operate in offboard mode while preserving the ability to take over manually? Would it have worked if we powered on the drone in manual or position hold and then switched to offboard? Do we launch our code before or after the mode change?
-
@Kessie The good news is that removing the prefix allows the px4 to see the messages and arm. Thank you! The bad news is that we weren't sure this would work so the drone wasn't in our flying lab and we had to physically grab it and disconnect the battery.
We tried powering on the RC controller to push the kill switch, but even though it connected to the receiver, the drone didn't respond to any of the RC controls including the mode and motor disable switches.
How do we operate in offboard mode while preserving the ability to take over manually? Would it have worked if we powered on the drone in manual or position hold and then switched to offboard? Do we launch our code before or after the mode change?
@claw You'll need to change the parameter COM_RC_OVERRIDE to also allow overriding offboard mode.
Reference link : https://docs.px4.io/main/en/advanced_config/parameter_reference.html#COM_RC_OVERRIDE
-
@claw You'll need to change the parameter COM_RC_OVERRIDE to also allow overriding offboard mode.
Reference link : https://docs.px4.io/main/en/advanced_config/parameter_reference.html#COM_RC_OVERRIDE
-
@claw You'll need to change the parameter COM_RC_OVERRIDE to also allow overriding offboard mode.
Reference link : https://docs.px4.io/main/en/advanced_config/parameter_reference.html#COM_RC_OVERRIDE
@Kessie Hi again, we just changed COM_RC_OVERRIDE to allow for overriding offboard mode and we were able to cut the motors while the drone was operating in offboard mode. We modified the PX4 ROS 2 Offboard Control Example code to only enable offboard mode and arm the drone, but we noticed that once the drone armed, it had a lot of throttle. I'm guessing there is a setting maybe in QGroundControl to modify the throttle somehow, or is there another way to fix this?
-
@Kessie Hi again, we just changed COM_RC_OVERRIDE to allow for overriding offboard mode and we were able to cut the motors while the drone was operating in offboard mode. We modified the PX4 ROS 2 Offboard Control Example code to only enable offboard mode and arm the drone, but we noticed that once the drone armed, it had a lot of throttle. I'm guessing there is a setting maybe in QGroundControl to modify the throttle somehow, or is there another way to fix this?
I just ran into another problem where I believe after running "voxl-configure-microdds" again, it seems some of my changes were reset as I noticed "offboard_mode" defaulted back to "figure_eight" while looking in the vision-hub config file. However, I did notice that my changes with the node publishers were not changed.

I thought I have reverted everything to how it was before, but the drone is now back to not flying at all. I also noticed that my list of ros2 topics has also shrunk down as well.

-
I just ran into another problem where I believe after running "voxl-configure-microdds" again, it seems some of my changes were reset as I noticed "offboard_mode" defaulted back to "figure_eight" while looking in the vision-hub config file. However, I did notice that my changes with the node publishers were not changed.
I thought I have reverted everything to how it was before, but the drone is now back to not flying at all. I also noticed that my list of ros2 topics has also shrunk down as well.
@GlennTee said in VOXL2/ROS2 Drone Runs Figure 8 Offboard Program Instead of My Program:
I thought I have reverted everything to how it was before, but the drone is now back to not flying at all. I also noticed that my list of ros2 topics has also shrunk down as well.
This likely means that those topics got populated from the offboard script not the px4-ros bridge. Could you check that voxl-microdds-agent is running when you see this happen.
Check with "voxl-inspect-services"

-
I just ran into another problem where I believe after running "voxl-configure-microdds" again, it seems some of my changes were reset as I noticed "offboard_mode" defaulted back to "figure_eight" while looking in the vision-hub config file. However, I did notice that my changes with the node publishers were not changed.
I thought I have reverted everything to how it was before, but the drone is now back to not flying at all. I also noticed that my list of ros2 topics has also shrunk down as well.
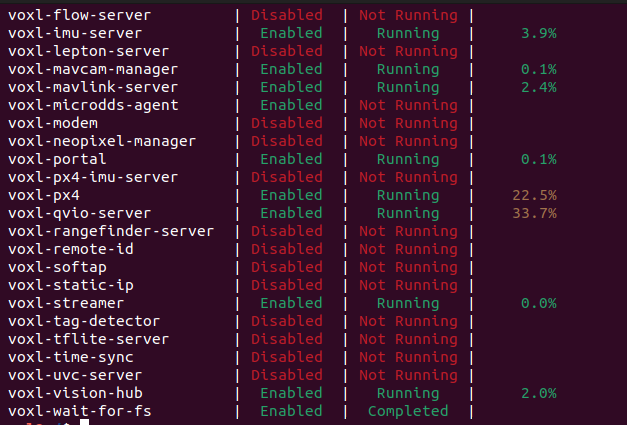
@teddy-zaremba Hi, I just checked using that command and it appears the agent is enabled, but it is not running.
-
@teddy-zaremba Hi, I just checked using that command and it appears the agent is enabled, but it is not running.
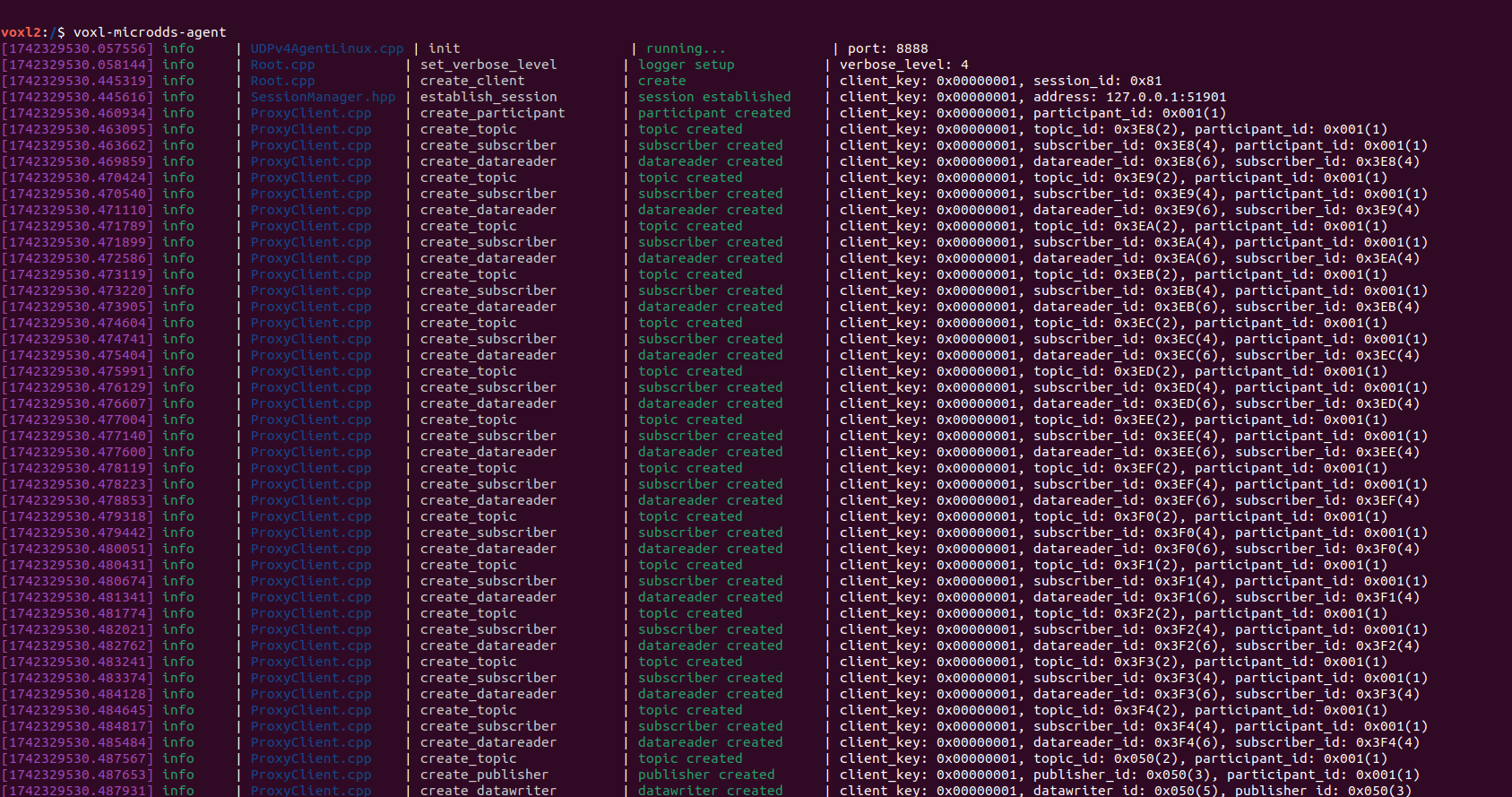
@GlennTee Can you run the command "voxl-microdds-agent" and share your output please?
-
@GlennTee Can you run the command "voxl-microdds-agent" and share your output please?
@teddy-zaremba said in VOXL2/ROS2 Drone Runs Figure 8 Offboard Program Instead of My Program:
voxl-microdds-agent"
This is what I get:
-
@teddy-zaremba said in VOXL2/ROS2 Drone Runs Figure 8 Offboard Program Instead of My Program:
voxl-microdds-agent"
This is what I get:
@GlennTee This looks fine to me if it's not running I'd suggest just restarting the service via "systemctl restart voxl-microdds-agent" and then double check that it's running with "voxl-inspect-services"
-
@GlennTee This looks fine to me if it's not running I'd suggest just restarting the service via "systemctl restart voxl-microdds-agent" and then double check that it's running with "voxl-inspect-services"
@teddy-zaremba Your help is very much appreciated.
Ok, so some of the confusion was related to editing the Python example, but it's actually running the cpp code. With that corrected, it shows all of the expected topics in the "ros2 topic list" and the code sends the arm command to the correct topic according to "ros2 topic echo /uav_4/fmu/in/vehicle_command", however, the Starling doesn't arm. We're trusting the example code as to the data structure that is actually populated and sent to that topic. Is there a reference as to what that should be?
-
@claw said in VOXL2/ROS2 Drone Runs Figure 8 Offboard Program Instead of My Program:
Ok, so some of the confusion was related to editing the Python example, but it's actually running the cpp code. With that corrected, it shows all of the expected topics in the "ros2 topic list" and the code sends the arm command to the correct topic according to "ros2 topic echo /uav_4/fmu/in/vehicle_command", however, the Starling doesn't arm. We're trusting the example code as to the data structure that is actually populated and sent to that topic. Is there a reference as to what that should be?
Reply
@claw what code are you referring to? The ros2 figure 8 code is written in python:
voxl-mpa-to-ros2 itself is written in CPP, but this node specific is in python as it can be either. With the DDS running, you do not need the voxl-mpa-to-ros2 code running as that just converts MPA to ros2, but regardless you dont need that running if the goal is just to publish to the dds via this ros2 node. How are you executing this?
ros2 run voxl_offboard_figure8 voxl_offboard_figure8?


Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login