@tom @Zachary-Lowell-0 Looks like I got it to work, I was just running the wrong command. Is there an existing topic called "tag_detections" that should be appearing or is there another repository I need to download in order to obtain that? Thank you.
G
Latest posts made by GlennTee
-
RE: (VOXL2 PX4 ROS2) MPA to ROS2 Tag Detectionposted in Modal Pipe Architecture (MPA)
-
RE: (VOXL2 PX4 ROS2) MPA to ROS2 Tag Detectionposted in Modal Pipe Architecture (MPA)
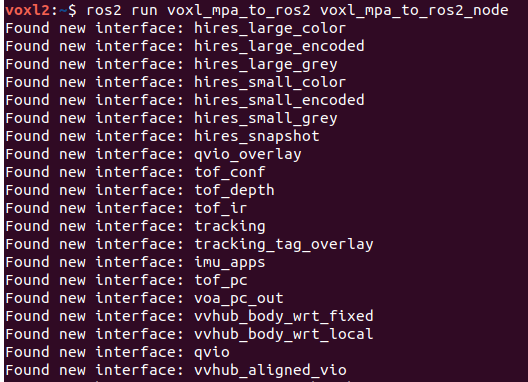
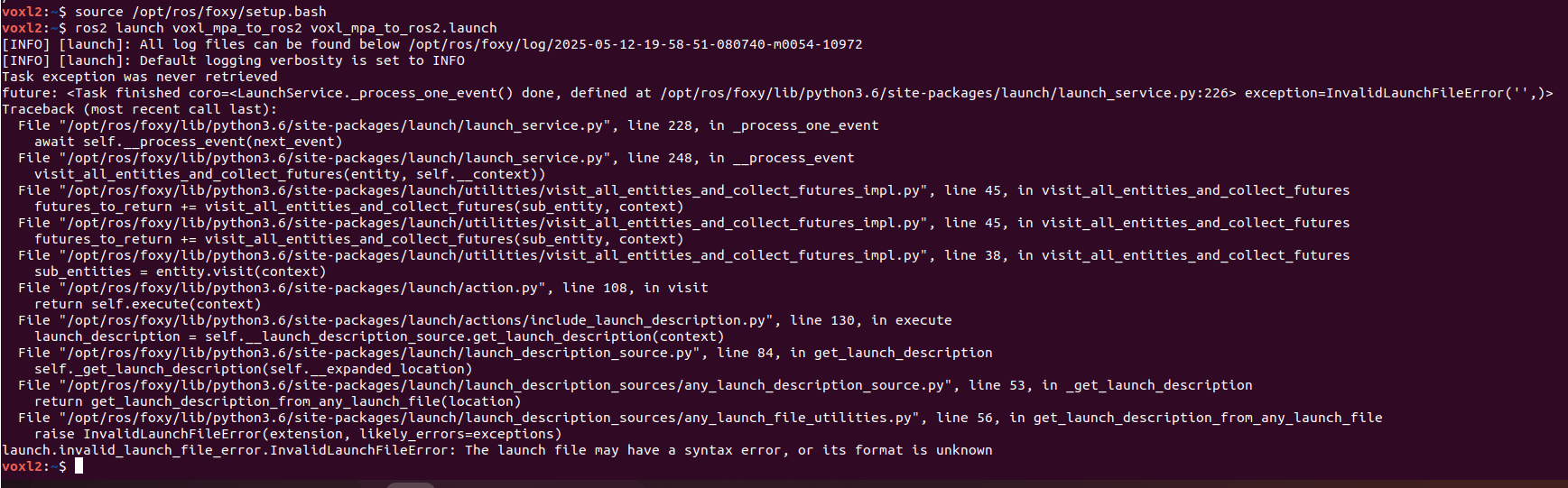
@tom @Zachary-Lowell-0 Hello again. It looks like I got the build to work. I tried cloning voxl-mpa-to-ros2 and that seemed to have worked in generating the build. I also ran "git submodule update --init --recursive" to pull in the px4 messages. I tried running "ros2 launch voxl_mpa_to_ros2 voxl_mpa_to_ros2.launch" but I received the following errors as shown below.
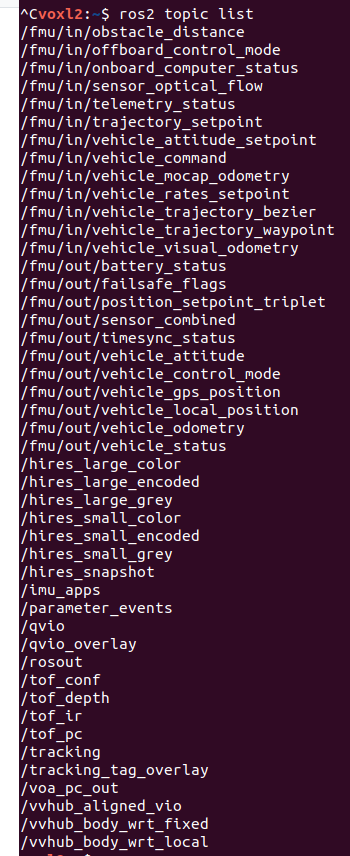
These are the ros2 topics that show up for me as well.
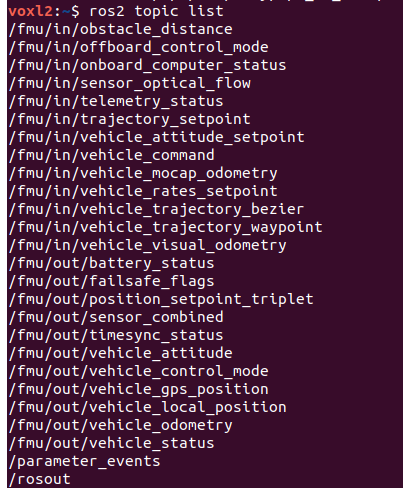
Is there something I'm missing that I need in order to see the ros2 topic for AprilTag detection? -
RE: (VOXL2 PX4 ROS2) MPA to ROS2 Tag Detectionposted in Modal Pipe Architecture (MPA)
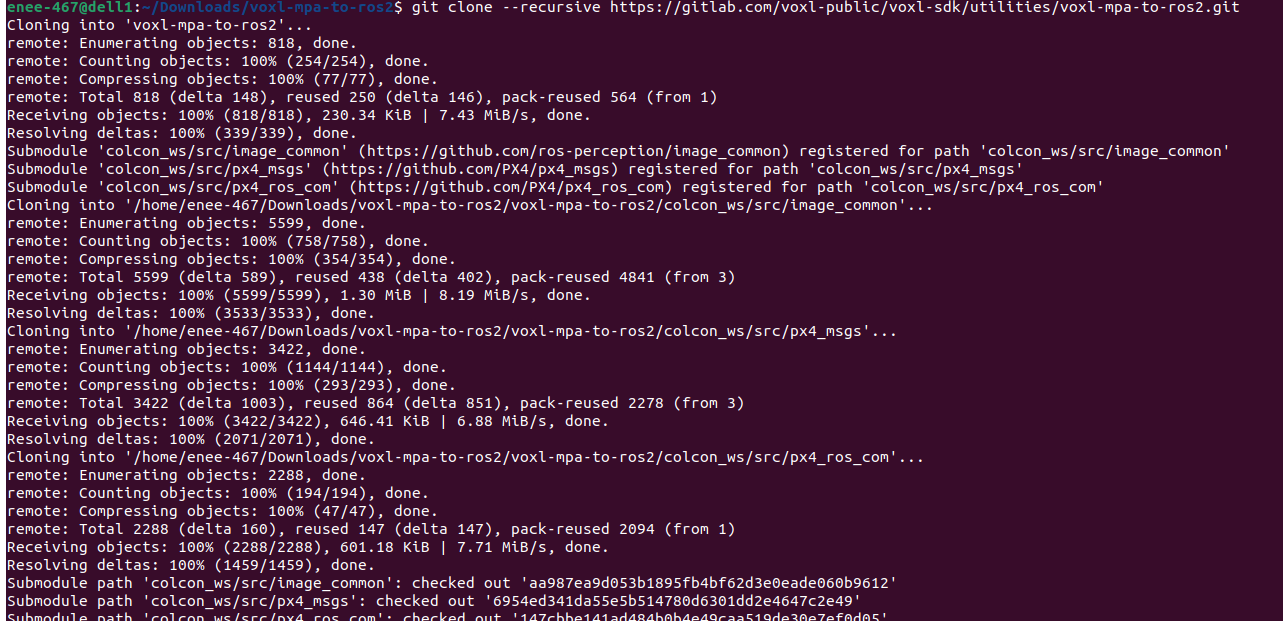
@tom Hello again. I just tried to run the command to clone the repository and I tried running ./build.sh qrb5165, but I keep getting the same error it looks like. Could you tell me the exact command I need to run in order to clone the repository? I know @Zachary Lowell 0 already outlined the commands I should follow. Thank you again.
-
RE: (VOXL2 PX4 ROS2) MPA to ROS2 Tag Detectionposted in Modal Pipe Architecture (MPA)
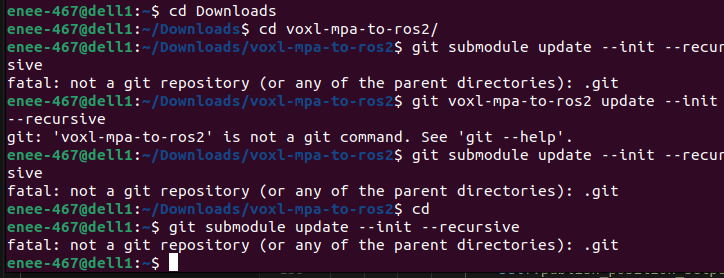
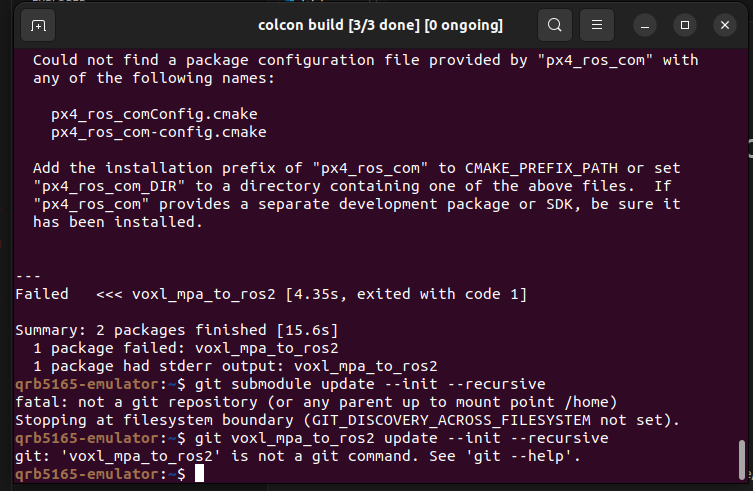
@tom Hello, when you mean docker do you mean the emulator? I'm not using a docker of any sorts (as far as I know of), but I did try running the command before the emulator and this is what I got:
-
RE: (VOXL2 PX4 ROS2) MPA to ROS2 Tag Detectionposted in Modal Pipe Architecture (MPA)
@Zachary-Lowell-0 I just tried running that command a few times but I've had no luck. Is there something I'm missing? Thanks again.
-
RE: (VOXL2 PX4 ROS2) MPA to ROS2 Tag Detectionposted in Modal Pipe Architecture (MPA)
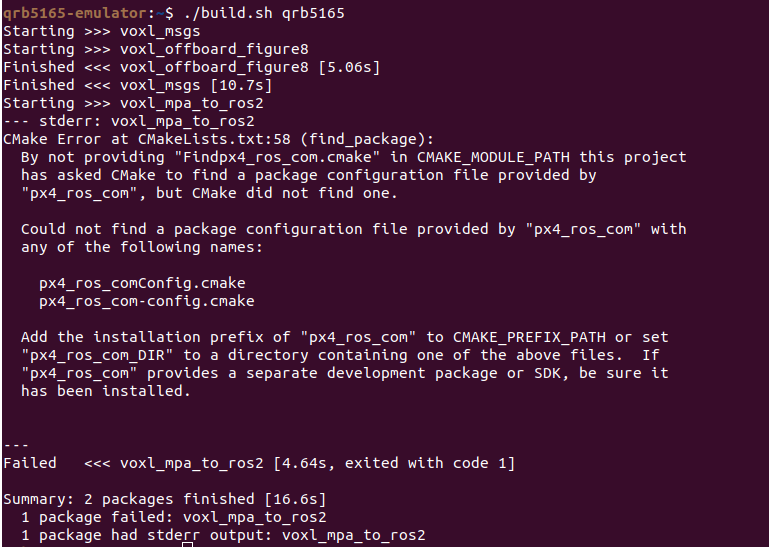
@Zachary-Lowell-0 Hello again. I attempted to run all of these commands, but I ran into an error on Step 5, which is shown below:
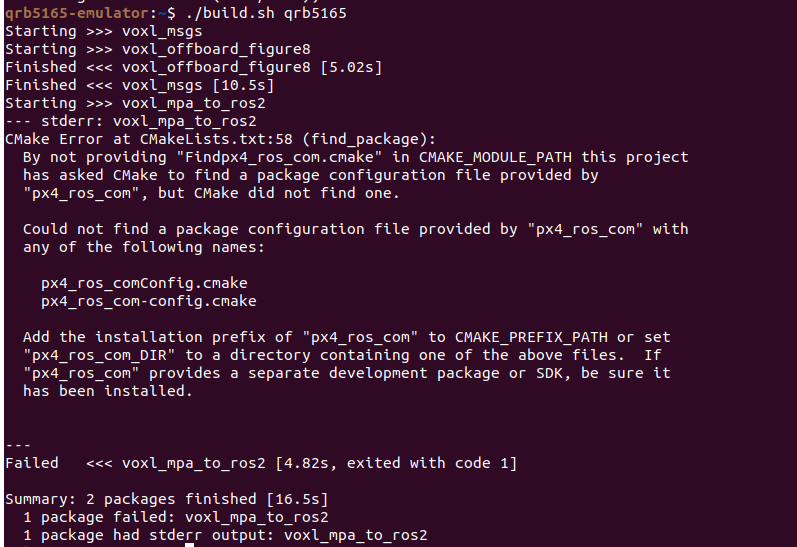
I tried cloning the px4_ros_com package, but that did not help anything. I just also realized I never ran "voxl-configure-mpa-to-ros2" when setting up the SDK v1.4.1, could that be the reason why I'm experiencing so many problems and had to manually install packages I didn't have right off the bat such as Colcon, Eigen3, Netiface, and more? My last question is that do you know when the next SDK release will be out? Thanks again for all your help. -
RE: (VOXL2 PX4 ROS2) MPA to ROS2 Tag Detectionposted in Modal Pipe Architecture (MPA)
@GlennTee Hello again. I attempted to run all of these commands, but I ran into an error on Step 5, which is shown below:
I tried cloning the px4_ros_com package, but that did not help anything. I just also realized I never ran "voxl-configure-mpa-to-ros2" when setting up the SDK v1.4.1, could that be the reason why I'm experiencing so many problems and had to manually install packages I didn't have right off the bat such as Colcon, Eigen3, Netiface, and more? My last question is that do you know when the next SDK release will be out? Thanks again for all your help. -
RE: (VOXL2 PX4 ROS2) MPA to ROS2 Tag Detectionposted in Modal Pipe Architecture (MPA)
@Zachary-Lowell-0 Thank you, I will try this
-
RE: (VOXL2 PX4 ROS2) px4_msgs Unrecognized In Programposted in Ask your questions right here!
@Zachary-Lowell-0 Yes I installed voxl-ros2-foxy. This time I just tried "source /opt/ros/foxy/mpa_to_ros2/install/setup.bash" and that was accepted. However, looking now px4_msgs is still not recognized within my program.

-
RE: (VOXL2 PX4 ROS2) px4_msgs Unrecognized In Programposted in Ask your questions right here!
@Zachary-Lowell-0 I tried "source /opt/ros/foxy/setup.bash" and "source install/local_setup.bash," but this was for trying to run my program. I just tried running "source /opt/ros/foxy/mpa_to_ros/install/setup.bash" and this is what I got:

I'm using remote ssh in order to access the files on the drone.