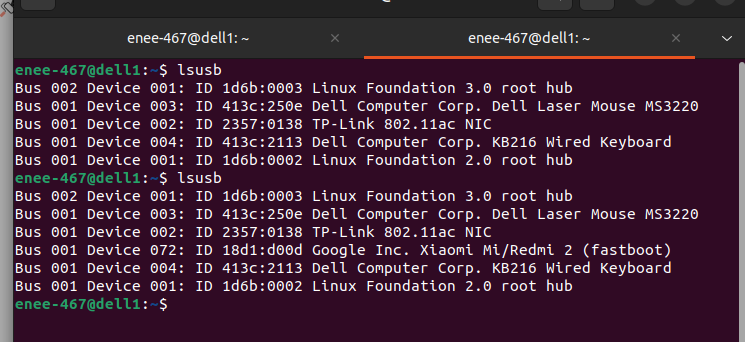
@tom That completed successfully, but still doesn't provide adb. Also, lsusb still shows the fastboot device whereas the other Starlings that are working show a qualcom device.
C
Latest posts made by claw
-
RE: VOXL2 troubleshootingposted in VOXL 2
-
RE: VOXL2 troubleshootingposted in VOXL 2
@tom i did check that initially and again before I loaded it this last time. We have the older version boards.
-
RE: VOXL2 troubleshootingposted in VOXL 2
@tom I tried to install the SDK but it failed.
I did re-read the instructions for unbricking which do say that ADB should be available after installing the flat build. Is there a mechanism for returning the boards for repair?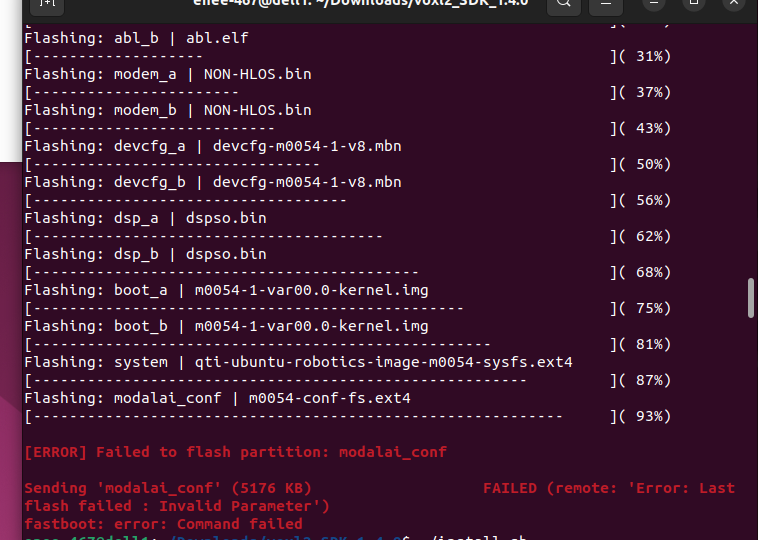
-
RE: VOXL2 troubleshootingposted in VOXL 2
@tom oh, ok. I thought I'd have adb from the firmware. My mistake. Thanks for the help.
-
RE: VOXL2 troubleshootingposted in VOXL 2
@Moderator here is a screenshot before and after plugging the usb cable in:
-
VOXL2 troubleshootingposted in VOXL 2
I have two VOXL2 boards as parts of Starling drones. They were both unresponsive to ADB so I reinstalled the base firmware using the unbrick procedures. I was able to get a successful result from QDL for both the provisioning and flat build install, however, ADB from my Linux machine does not find the devices. How do I troubleshoot this further?
Thank you
-
RE: VOXL2 ROS2 Starling Code Inconsistenciesposted in ROS
@Zachary-Lowell-0 Thank you for your help and guidance. Is there a way to get the status information like battery voltage using Python?
-
RE: VOXL2 ROS2 Starling Code Inconsistenciesposted in ROS
@Zachary-Lowell-0 No, we're novices and trying to just focus on the Starling. HITL, would be a distraction (unless you say differently) from the task at hand.