It was a massive lift on my end. Many changes as you can see from the pull request. Years of development
Best posts made by wilkinsaf
-
RE: Push to Gitlab?posted in Software Development
-
RE: VOXL rebooting PX4posted in Ask your questions right here!
It appears this happens when the sensors are not calibrated on the drone. voxl-vision-px4 picks up on sensor inconsistency and restarts PX4.
So, calibrated the sensors. Looks better
resolved
-
RE: Stereo Cameras Error sending request 11, ErrorCode: -19posted in VOXL Flight
My fault. Found a small tear in the ribbon for the stereo cameras
RESOLVED
-
Docker Documentationposted in VOXL
I think these documentation pages are the same.
https://docs.modalai.com/voxl-cross/
https://docs.modalai.com/voxl-emulator/
https://docs.modalai.com/voxl-emulator/Not huge deal, but thought I would post ticket to track
-
Docker System error: write /sys/fs/cgroup/cpuset/system.slice/cpuset.cpus: invalidposted in Software Development
Docker container non-deterministic fail
I am trying to start a container with the following command:
docker run --rm -it --net=host cal_compass:latestSometimes it starts right up. Other times it gives me this error:
Cannot start container 05621665b072b85b6419f904c0ffb511a1ad07a32c1ca675820aaadbefa4a316: [8] System error: write /sys/fs/cgroup/cpuset/system.slice/cpuset.cpus: invalid argument"Any ideas what could be wrong? Thank you for any insights
-
RE: PWM Pinout 5 only has signal with camera trigger.posted in Ask your questions right here!
@Caleb-Rievley are you loading firmware 1.12 and 1.13 on the VOXL Flight?
ModalAI comes out with their own versions of PX4. Let me dig up that URL:
-
GPS/VIO EKF2 switchposted in VOXL Flight
Hello,
We have a UAV we would like to fly indoors and outdoors without landing during that transition.
I know that there is support for EKF2 GPS/VIO "fusion" using 329 as the EKF2_AID_MASK in PX4
Link to tutorialWe were thinking of manually changing the EKF2 bitmask when we fly indoors or outdoors.
My question is, are there any software/features available that would more easily support switching from GPS to VIO? Want to make sure I am not redoing work before I start.
Thank you
-
RE: Docker System error: write /sys/fs/cgroup/cpuset/system.slice/cpuset.cpus: invalidposted in Software Development
So it turns out that the post-running script for docker service relies on the image "hello-world:latest"
I had uninstalled that image to save space.
Redownloading image and trying again
-
RE: "Error battery voltage" on VOXL2posted in Ask your questions right here!
@modaltb This worked for me. Removing the USBC cable, booting up, and then plugging in.
-
RE: Voxl stuck in waiting after unbrickingposted in VOXL m500 Reference Drone
Wanted to update this by saying I experienced same issue, but I resolved this by disconnecting tracking camera that had been installed upside down. So, if anyone is reading this in the future....try disconnecting your cameras attached to the board
Latest posts made by wilkinsaf
-
RE: Voxl 2 and Doodle Helixposted in Ask your questions right here!
I tried on a different voxl2 with voxl-suite: 1.2.0 installed
the other one had voxl-suite 1.1.3 installed.Not sure if that makes a difference....or if the configuration of the voxl2 was different.....
Either way if you are facing the same issue try SDK 1.2.0
-
RE: Voxl 2 and Doodle Helixposted in Ask your questions right here!
I am now facing this issue as well.
Can ping the radios fine, and the voxl2 has an ip... but for some reason i can not ping the voxl2 from my computer.
However, unplugging and replugging does not help
-
RE: Take-Off and Land command each fly to xy=[0,0] location instead of on the spotposted in Ask your questions right here!
What coordinate frame are you using?
-
RE: Doodle Labs Mini Integration with VOXL 2posted in Cellular Modems
@Vinny This provides power as well. This is pretty cool
-
voxl-mavlink-server primary and seconday links cause slow loadingposted in VOXL SDK
https://www.loom.com/share/c91f6303b8754d7cbafb867e94a85547
I am seeing primary and secondary link in voxl-mavlink-server cause slow loading on QGC. I am on a starling with a DTC radio mapped to 192.168.0.100
-
IMX412 vs IMX577posted in Ask your questions right here!
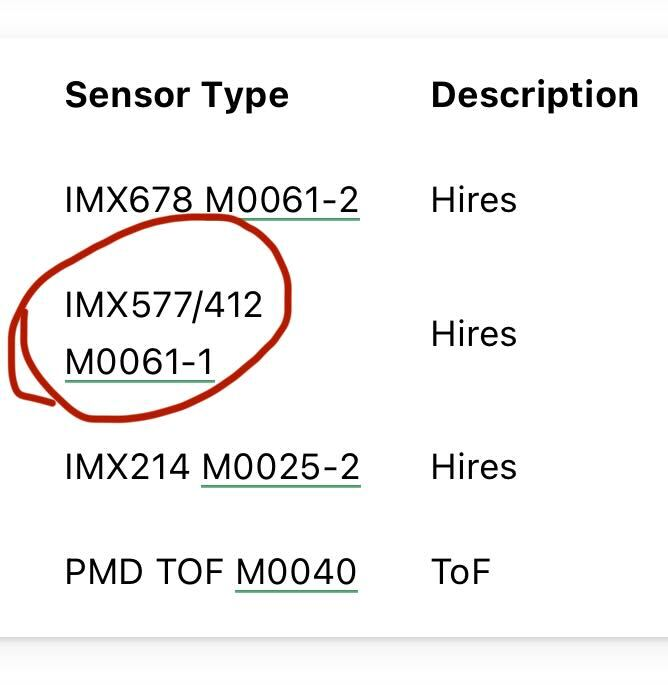
Noticed that we ordered an IMX412, but received one that says IMX577. Are there any differences between the two that we should be aware of?
-
VIO keeps falling outposted in VOXL m500 Reference Drone
Hello,
We have a stock m500 that we are flying with. We did upgrade the SDK to 1.12, but that has pretty much been the only change. We have noticed that we get large VIO dropouts. More than what we got with SDK 0.95. We are unsure if the algorithm changed or the auto-exposure is now different. It appears we do not pick up on any more features after the initial ones we detect. I recorded a video with the QVIO quality, QVIO overlay, and a video of the drone below.
https://drive.google.com/file/d/1BwvEH_xEdVYkOApaPHt4Ihs6pbDmLCc7/view?usp=drive_link
https://drive.google.com/file/d/1g5dsWWnsaG_SF6XP2rppVfbOsG679cCp/view?usp=drive_linkany suggestions as to what we can change to improve the situation would be great. THank you
-
RE: Where are config files on gitlab?posted in VOXL SDK
https://www.loom.com/share/8b4c948fb3794e7da8fec4c054bf0247
they are actually .cpp files that generate the config file
config_defaults.cpp -
Where are config files on gitlab?posted in VOXL SDK
I would like to create my own custom config files, but I can not find them on gitlab. Where are they?
-
RE: RPM controlposted in VOXL SDK
@wilkinsaf For context we are connected to an external flight controller over UART DSP