@LucasW to answer my own question, VOXL supports 5 GHz. This can be verified by running iw list and looking at the supported channels.
The /data/misc/wifi/wpa_supplicant.conf file does not seem to take effect when trying to specify frequencies, for instance (for 5 GHz channels 36, 40, 44, and 48:
country=ch
ctrl_interface=/var/run/wpa_supplicant
network={
ssid="my-ssid"
bssid=00:00:00:00:00:00
freq_list=5180 5200 5220 5240
scan_freq=5180 5200 5220 5240
proto=RSN
key_mgmt=WPA-PSK
pairwise=CCMP TKIP
group=CCMP TKIP
psk="my-pwd"
}
The only way I found to connect to 5 GHz is to disable the 2.4 GHz radio entirely on the router. Otherwise, the connection defaults to 2.4 GHz.
On the router, it is also better to set a fixed channel (e.g., 36) rather than letting it be automatic. In auto mode, the robots could not connect systematically to the network.
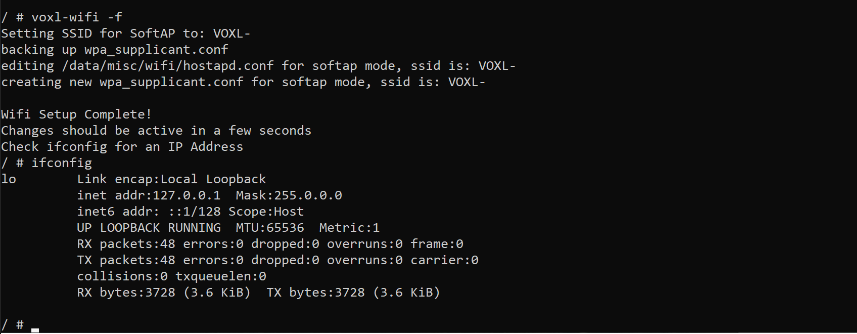
Note also that my question was wrong in the sense that the hostapd.conf files are used to generate the access point, not to connect in station mode.
These are maybe considerations that could be added to the technical doc @Chad-Sweet ?