GPS/Mag - Connection woes and Firmware versions
-
Thanks for the update!
-
Hi again,
I fought myself through some more weirdness and think I have a pretty good grasp on what's happening now:The VOXL's "TELEM4/ SERIAL" port does not appear to work at all no matter the FW version.
At least not as it's broken out on J1009.I tried several GPS/ mag modules now plus ESC telemetry and nothing at all gets recognized on that port.
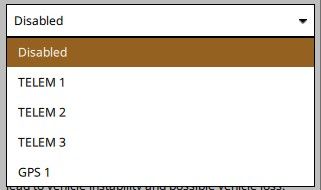
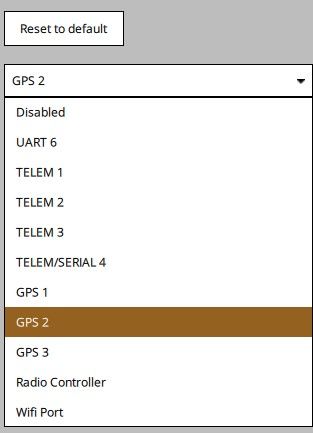
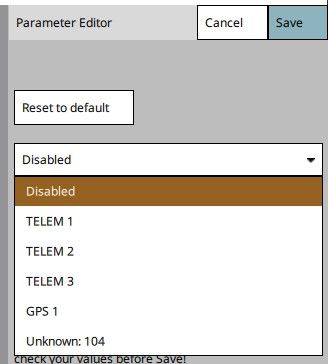
It is also only selectable (along with the mysterious "GPS2" and "GPS3" ports) in FW 1.11.3-0.0.5.Here's a pic of the serial selection in 1.12 coming from 1.11 with "data survives resets":
This is the selection for Dshot-ESC telemetry where I put it on J1009 and chose "TELEM/ Serial 4" before in 1.11.
Question: What exactly is DGPS-Lock describing? Is it Dual-GPS lock as I suspect? It only shows up in the newer FW's whith the 2nd unit on TELEM3 so I assume it's working?
One more question:
If I use the newer FW with the ports selectable like shown in the picture, where could I put ESC telemetry on?
TELEM1 has TBS-Crossfire Telemetry and TELEM2 is the on-pcb connection between the Flight Core and the VOXL, if I understand that correctly?
So there's only one broken-out UART left? (TELEM3)? and I have to choose between 2nd GPS or ESC telemetry?Phew! ^^
Best regards -
OK OK, I see what you are talking about.
Yes J1009 is a UART... but not configured for TELEM, this is where we map MAVLINK instances to UARTs:
File not found · PX4/PX4-Autopilot
PX4 Autopilot Software. Contribute to PX4/PX4-Autopilot development by creating an account on GitHub.

GitHub (github.com)
There is/was a max MAVLINK instance count (at least in 1.10/1.11) that prevented enabling another instance.
Are you setup to compile PX4? It might be you just need to add another instance after the line called out above.
For the UART instances, this is what we have by default, and you could mess around by changing these to fit your need.
GPS1:/dev/ttyS0 # UART1 / J1012 TEL1:/dev/ttyS6 # UART7 / J1010 TEL2:/dev/ttyS4 # UART5 / (internally routed) TEL3:/dev/ttyS1 # USART2 / J1002The form factor is off of a "racer" style, where we don't have all the interfaces like PX4IO etc, so you might find some limitations if comparing to other flight controllers with more IO.
-
OK OK, I see what you are talking about.
Yes J1009 is a UART... but not configured for TELEM, this is where we map MAVLINK instances to UARTs:
File not found · PX4/PX4-Autopilot
PX4 Autopilot Software. Contribute to PX4/PX4-Autopilot development by creating an account on GitHub.
GitHub (github.com)
There is/was a max MAVLINK instance count (at least in 1.10/1.11) that prevented enabling another instance.
Are you setup to compile PX4? It might be you just need to add another instance after the line called out above.
For the UART instances, this is what we have by default, and you could mess around by changing these to fit your need.
GPS1:/dev/ttyS0 # UART1 / J1012 TEL1:/dev/ttyS6 # UART7 / J1010 TEL2:/dev/ttyS4 # UART5 / (internally routed) TEL3:/dev/ttyS1 # USART2 / J1002The form factor is off of a "racer" style, where we don't have all the interfaces like PX4IO etc, so you might find some limitations if comparing to other flight controllers with more IO.
@modaltb Cool, thanks. This is good information.
I've been setting up to make PX4, yes.
At least the jmavsim I got up and running so I think that's kinda halfway there, right...?I've switched to 1.12 for good now though, since it's just a lot better (like no weird limitations for take-off altitude., more of the important params to set, etc.).
Only thing missing now is ESC telemetry...So just for a basic understanding, i would write into the lines you posted that J1009 is supposed to be a telem port, compile it and then it would become selectable in QGC?
And it wasn't working in 1.11 (although selectable) because of the mav component conflict?I also found an error in the log (from 1.12) that said something about exactly that, I'll edit in the exact phrasing here later.
For now, thanks a lot my friend.
-
Don't sweat it, I'm pretty pleased with how the VOXL performs on PX4 1.12.1 right now.
")
I've been messing around with 1.13 as well and love the idea of adjusting the IMU sampling rates but didn't get it to arm due to CPU load above 91-or-something percent even with what I would consider tame rates for an F7 chip but we'll see.")
thanks again and enjoy a great weekend. -
@modaltb Cool, thanks. This is good information.
I've been setting up to make PX4, yes.
At least the jmavsim I got up and running so I think that's kinda halfway there, right...?I've switched to 1.12 for good now though, since it's just a lot better (like no weird limitations for take-off altitude., more of the important params to set, etc.).
Only thing missing now is ESC telemetry...So just for a basic understanding, i would write into the lines you posted that J1009 is supposed to be a telem port, compile it and then it would become selectable in QGC?
And it wasn't working in 1.11 (although selectable) because of the mav component conflict?I also found an error in the log (from 1.12) that said something about exactly that, I'll edit in the exact phrasing here later.
For now, thanks a lot my friend.
-
OK OK, I see what you are talking about.
Yes J1009 is a UART... but not configured for TELEM, this is where we map MAVLINK instances to UARTs:
File not found · PX4/PX4-Autopilot
PX4 Autopilot Software. Contribute to PX4/PX4-Autopilot development by creating an account on GitHub.
GitHub (github.com)
There is/was a max MAVLINK instance count (at least in 1.10/1.11) that prevented enabling another instance.
Are you setup to compile PX4? It might be you just need to add another instance after the line called out above.
For the UART instances, this is what we have by default, and you could mess around by changing these to fit your need.
GPS1:/dev/ttyS0 # UART1 / J1012 TEL1:/dev/ttyS6 # UART7 / J1010 TEL2:/dev/ttyS4 # UART5 / (internally routed) TEL3:/dev/ttyS1 # USART2 / J1002The form factor is off of a "racer" style, where we don't have all the interfaces like PX4IO etc, so you might find some limitations if comparing to other flight controllers with more IO.
@modaltb said in GPS/Mag - Connection woes and Firmware versions:
OK OK, I see what you are talking about.
Yes J1009 is a UART... but not configured for TELEM, this is where we map MAVLINK instances to UARTs:
File not found · PX4/PX4-Autopilot
PX4 Autopilot Software. Contribute to PX4/PX4-Autopilot development by creating an account on GitHub.
GitHub (github.com)
There is/was a max MAVLINK instance count (at least in 1.10/1.11) that prevented enabling another instance.
Are you setup to compile PX4? It might be you just need to add another instance after the line called out above.
For the UART instances, this is what we have by default, and you could mess around by changing these to fit your need.
GPS1:/dev/ttyS0 # UART1 / J1012 TEL1:/dev/ttyS6 # UART7 / J1010 TEL2:/dev/ttyS4 # UART5 / (internally routed) TEL3:/dev/ttyS1 # USART2 / J1002The form factor is off of a "racer" style, where we don't have all the interfaces like PX4IO etc, so you might find some limitations if comparing to other flight controllers with more IO.
Hey man, just wanted to let you know that against all odds this actually worked.
I put in the line describing TELEM4 and built the firmware myself and - tadaa!
Thanks again. -
Hey everyone,
just wanted to let you know that my fix got merged into master so it should work for everyone now...I'd have loved to change the title of this to something a little more descriptive but it's too late now I guess.
anyway, cheers everyone, happy flying.

Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login