Hello, I'm Chris from Berlin and I just wanted to kind of just introduce myself and say hi and wave over and all. ") Because I'm likely to ask questions here in the near future but I'm not at the point yet where I have all the information I need to ask the right specific questions you know?
Because I'm likely to ask questions here in the near future but I'm not at the point yet where I have all the information I need to ask the right specific questions you know?
I'm mostly whirling about MAVLINK errors atm but am personally more on the PX4 flying-side, like I know my way around flight controllers and drones and stuff. =P
m4v3r
@m4v3r
technician/pilot/semi-dev @Arrowtec GmbH
Best posts made by m4v3r
-
Hey everyone^^posted in VOXL Flight
-
RE: GPS/Mag - Connection woes and Firmware versionsposted in VOXL Flight
@modaltb said in GPS/Mag - Connection woes and Firmware versions:
OK OK, I see what you are talking about.
Yes J1009 is a UART... but not configured for TELEM, this is where we map MAVLINK instances to UARTs:
https://github.com/PX4/PX4-Autopilot/blob/master/boards/modalai/fc-v1/default.cmake#L12
There is/was a max MAVLINK instance count (at least in 1.10/1.11) that prevented enabling another instance.
Are you setup to compile PX4? It might be you just need to add another instance after the line called out above.
For the UART instances, this is what we have by default, and you could mess around by changing these to fit your need.
GPS1:/dev/ttyS0 # UART1 / J1012 TEL1:/dev/ttyS6 # UART7 / J1010 TEL2:/dev/ttyS4 # UART5 / (internally routed) TEL3:/dev/ttyS1 # USART2 / J1002The form factor is off of a "racer" style, where we don't have all the interfaces like PX4IO etc, so you might find some limitations if comparing to other flight controllers with more IO.
Hey man, just wanted to let you know that against all odds this actually worked.
I put in the line describing TELEM4 and built the firmware myself and - tadaa!
Thanks again.")
-
RE: GPS/Mag - Connection woes and Firmware versionsposted in VOXL Flight
Hey everyone,
just wanted to let you know that my fix got merged into master so it should work for everyone now...I'd have loved to change the title of this to something a little more descriptive but it's too late now I guess.
anyway, cheers everyone, happy flying. -
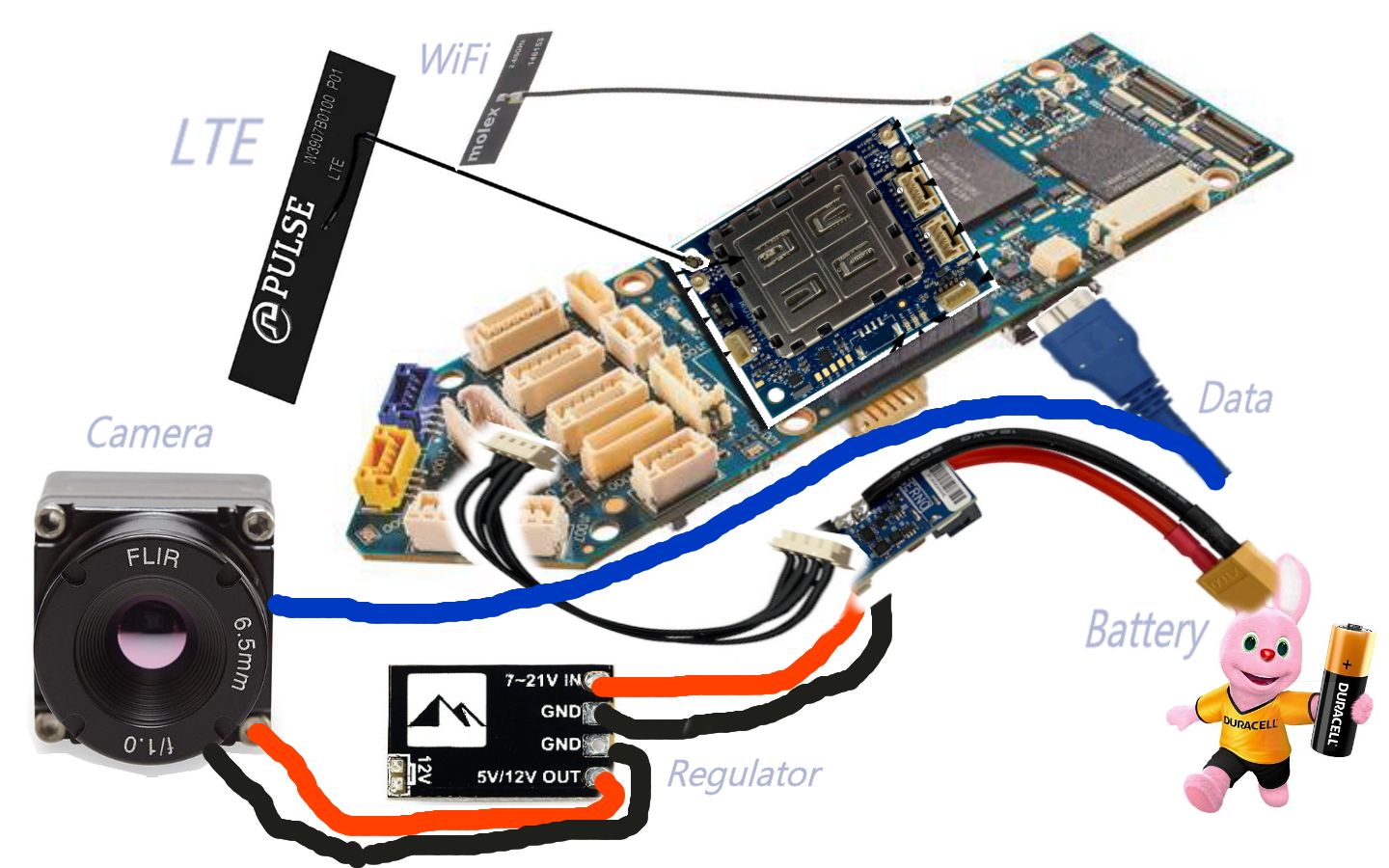
RE: "wlan" not starting (LTE-Module attached, possible conflict w/ camera on USB-Port?)posted in VOXL Flight
@tom yes, will try and do so tomorrow.
actually it might not be feasible for me to snap actual photos I just made an image showing the basic concept
Latest posts made by m4v3r
-
What exactly does "offboard_mode follow_tag" do?posted in Ask your questions right here!
Hey there.
I'm in the process of achieving precision landing via fiducial marker and I thought setting the offboard mode on VOXL2 to "follow_tag" would be a part of that but before flight testing I tried researching what that setting actually does and your SDK gitlab that is linked from your VOXL Vision Hub-guides page says it's for R&D only and that "the drone will follow [the tag] around".
Do I even need to use offboard mode to achieve precision landing or is PX4's "Precision Land" flight mode utilizing VIO already enough?
best regards -
RE: VOXL Mini 4in1 ESC and VOXL 2posted in Ask your questions right here!
@Eric-Katzfey Hey there. Thanks for looking into this.
I installed VOXL Suite 1.2.0 today and was able to talk to the ESC but then I tried to update the firmware (because motors would only spin very slowly regardless of throttle signal) . The flashing process went through on all 4 without any errors but now only two of the four are recognized anymore
The two ESCs that still show up say "Firmware version 39" and "Bootloader version 184" but the other two won't show up anymore.
They're still doing a startup tone on the motors but it's a different tune from the two that are showing up in software and it also says something about not all params match! and I'm just lost with all the versions right now.Can you maybe tell me a stable combination of the system image and voxl suite versions that will run PX4 1.14 and be able to communicate with the 4in1 ESC on VOXL 2's "J18", please?
The flashing of the ESCs took place with system-image 1.5.5 and voxl-suite 1.2.0 using voxl-esc 1.3.8.Messages I noticed, not specific to flashing but all around:
"WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data"
"ID config CRC mismatch 60163 != 0"
"ERROR: Params for ID 0 are invalid"
...and so on.
Sorry if I sound confused but I really am. -
RE: VOXL Mini 4in1 ESC and VOXL 2posted in Ask your questions right here!
I just apt- and apt-get updated everything and ran the configuration scripts again (SKU and mpa) and while "voxl-esc" still does not detect anything I can now confirm spinning motors from QGroundControl's actuator tab.
Working as expected, only the script doesn't seem to detect anything.
Any ideas on why? -
RE: VOXL Mini 4in1 ESC and VOXL 2posted in Ask your questions right here!
@m4v3r Here's the console output that I'm seeing:
voxl2:~$ voxl-esc Starting Wizard What do you want to do? 1) scan 3) spin 5) upload_params 2) detect 4) upgrade_firmware #? 1 enabling bridge bridge enabled Detected Python version : 3.6.9 (default, Mar 10 2023, 16:46:00) [GCC 8.4.0] Found voxl-esc tools bin version: 1.4 VOXL Platform: M0054 Detected RB5 Flight, VOXL2 M0054 or M0104! INFO: Scanning for ESC firmware: /dev/slpi-uart-2, baud: 2000000 /usr/lib/libvoxl_io.so: undefined symbol: fc_sensor_set_library_name INFO: Scanning for ESC firmware: /dev/slpi-uart-2, baud: 250000 /usr/lib/libvoxl_io.so: undefined symbol: fc_sensor_set_library_name INFO: Scanning for ESC firmware: /dev/slpi-uart-2, baud: 921600 /usr/lib/libvoxl_io.so: undefined symbol: fc_sensor_set_library_name INFO: Scanning for ESC firmware: /dev/slpi-uart-2, baud: 230400 /usr/lib/libvoxl_io.so: undefined symbol: fc_sensor_set_library_name INFO: Scanning for ESC firmware: /dev/slpi-uart-2, baud: 57600 /usr/lib/libvoxl_io.so: undefined symbol: fc_sensor_set_library_name INFO: Scanning for ESC firmware: /dev/slpi-uart-2, baud: 115200 /usr/lib/libvoxl_io.so: undefined symbol: fc_sensor_set_library_name INFO: Scanning for ESC bootloader: /dev/slpi-uart-2, baud: 230400 /usr/lib/libvoxl_io.so: undefined symbol: fc_sensor_set_library_name WARNING: No ESC(s) detected successfully pinged ESCs disabling bridge bridge disabled DONE -
RE: voxl2 and dshot escposted in ESCs
@Kyuhyong-You I think they want you to use an external flight control for all that stuff.
-
VOXL Mini 4in1 ESC and VOXL 2posted in Ask your questions right here!
Hello,
I am trying to connect the aforementioned items to no avail.
I have connected the ESC's UART's TX, RX and GND to their corresponding pins on VOXL 2 "J18" and updated PX4 on the DSP to your 1.14 fork from the SDK v.1.1 repo and installed "voxl-esc" inside the VOXL 2 but if I run voxl-esc and try (1) which is "scan" it always comes out as "no ESCs detected".
The motors are giving off a little boop-beep when first powering up so I'm thinking it's not a hardware fault.
Am I doing something wrong or is that "VOXL Mini 4in1 ESC" just not compatible with the VOXL 2?
cheers and thanks for any pointers in the correct direction that I need to take here.
regards -
RE: VOXL is rebooting PX4posted in Ask your questions right here!
@tom It's probably normal afterall since the voxl-vision-hub service's config file contains a parameter "reset PX4 on error".
I set it to "false" and now this behaviour disappeared. -
RE: Mavlink Mode on FC-V1posted in VOXL Flight
Hey,
just to give a little update here:
I found out how to set the "force mavlink mode" variable in the voxl-vision-hub.conf which was forcing the parameter back in PX4, and simultaneously set it to "Normal" in PX4.
So far I don't see any downsides from using MAV_1_MODE=0 (normal).
I'm only making use of voxl-mavlink-server and voxl-vision-hub for the time being, basically to use VOXL's connectivity to send MAV commands to the PX4.
Do you think using "normal" will have any downsides?
The inconsistency between your documentation and the .conf and PX4 firmware files still exists though, so I'd really like to get some more insight on this.
Thanks and a great weekend to everyone.
-
RE: Flight core integrate with a Wifi module?posted in Flight Core
Hey the answer is yes.
I use DroneBridge for ESP32 but I believe there's a ton of other similar mavlink apps for ESPs.
cheers -
RE: Flight Core w/ BMI088posted in VOXL Flight
Hey Vinny,
no worries I'm not one to expect a full answer within an hour to anything I ask you know...
Thanks so much for clarifyiing this for me and I take it you wouldn't suggest using it since it's an older part?
From what I was able to compare so far I'd say using it together with the 42688p beats the 42688p/20602 combo noise wise but might also just be a hunch, I'll have to do more testing...
And yeah I think we do have quite a few boards with the two baros where one is on the Flight Core part and the other one on the opposite-end corner of the VOXL part.^^
Everything that's directly on the Flight Core portion is quite simple to talk to from a PX4 autopilot but everything VOXL-side would require wrapping it in the MPA I guess which also is totally out of my department.Sorry I'm rambling here, thanks again for the clarification and may you have a wonderful weekend.
chgeers