Hey there.
I'm in the process of achieving precision landing via fiducial marker and I thought setting the offboard mode on VOXL2 to "follow_tag" would be a part of that but before flight testing I tried researching what that setting actually does and your SDK gitlab that is linked from your VOXL Vision Hub-guides page says it's for R&D only and that "the drone will follow [the tag] around".
Do I even need to use offboard mode to achieve precision landing or is PX4's "Precision Land" flight mode utilizing VIO already enough?
best regards
m4v3r
@m4v3r
Posts
-
What exactly does "offboard_mode follow_tag" do? -
VOXL Mini 4in1 ESC and VOXL 2@Eric-Katzfey Hey there. Thanks for looking into this.
I installed VOXL Suite 1.2.0 today and was able to talk to the ESC but then I tried to update the firmware (because motors would only spin very slowly regardless of throttle signal) . The flashing process went through on all 4 without any errors but now only two of the four are recognized anymore
The two ESCs that still show up say "Firmware version 39" and "Bootloader version 184" but the other two won't show up anymore.
They're still doing a startup tone on the motors but it's a different tune from the two that are showing up in software and it also says something about not all params match! and I'm just lost with all the versions right now.Can you maybe tell me a stable combination of the system image and voxl suite versions that will run PX4 1.14 and be able to communicate with the 4in1 ESC on VOXL 2's "J18", please?
The flashing of the ESCs took place with system-image 1.5.5 and voxl-suite 1.2.0 using voxl-esc 1.3.8.Messages I noticed, not specific to flashing but all around:
"WARNING: Received data from SLPI for unrecognized topic aggregation, discarding data"
"ID config CRC mismatch 60163 != 0"
"ERROR: Params for ID 0 are invalid"
...and so on.
Sorry if I sound confused but I really am.")
-
VOXL Mini 4in1 ESC and VOXL 2I just apt- and apt-get updated everything and ran the configuration scripts again (SKU and mpa) and while "voxl-esc" still does not detect anything I can now confirm spinning motors from QGroundControl's actuator tab.
Working as expected, only the script doesn't seem to detect anything.
Any ideas on why? -
VOXL Mini 4in1 ESC and VOXL 2@m4v3r Here's the console output that I'm seeing:
voxl2:~$ voxl-esc Starting Wizard What do you want to do? 1) scan 3) spin 5) upload_params 2) detect 4) upgrade_firmware #? 1 enabling bridge bridge enabled Detected Python version : 3.6.9 (default, Mar 10 2023, 16:46:00) [GCC 8.4.0] Found voxl-esc tools bin version: 1.4 VOXL Platform: M0054 Detected RB5 Flight, VOXL2 M0054 or M0104! INFO: Scanning for ESC firmware: /dev/slpi-uart-2, baud: 2000000 /usr/lib/libvoxl_io.so: undefined symbol: fc_sensor_set_library_name INFO: Scanning for ESC firmware: /dev/slpi-uart-2, baud: 250000 /usr/lib/libvoxl_io.so: undefined symbol: fc_sensor_set_library_name INFO: Scanning for ESC firmware: /dev/slpi-uart-2, baud: 921600 /usr/lib/libvoxl_io.so: undefined symbol: fc_sensor_set_library_name INFO: Scanning for ESC firmware: /dev/slpi-uart-2, baud: 230400 /usr/lib/libvoxl_io.so: undefined symbol: fc_sensor_set_library_name INFO: Scanning for ESC firmware: /dev/slpi-uart-2, baud: 57600 /usr/lib/libvoxl_io.so: undefined symbol: fc_sensor_set_library_name INFO: Scanning for ESC firmware: /dev/slpi-uart-2, baud: 115200 /usr/lib/libvoxl_io.so: undefined symbol: fc_sensor_set_library_name INFO: Scanning for ESC bootloader: /dev/slpi-uart-2, baud: 230400 /usr/lib/libvoxl_io.so: undefined symbol: fc_sensor_set_library_name WARNING: No ESC(s) detected successfully pinged ESCs disabling bridge bridge disabled DONE -
voxl2 and dshot esc@Kyuhyong-You I think they want you to use an external flight control for all that stuff.
-
VOXL Mini 4in1 ESC and VOXL 2Hello,
I am trying to connect the aforementioned items to no avail.
I have connected the ESC's UART's TX, RX and GND to their corresponding pins on VOXL 2 "J18" and updated PX4 on the DSP to your 1.14 fork from the SDK v.1.1 repo and installed "voxl-esc" inside the VOXL 2 but if I run voxl-esc and try (1) which is "scan" it always comes out as "no ESCs detected".
The motors are giving off a little boop-beep when first powering up so I'm thinking it's not a hardware fault.
Am I doing something wrong or is that "VOXL Mini 4in1 ESC" just not compatible with the VOXL 2?
cheers and thanks for any pointers in the correct direction that I need to take here.
regards -
VOXL is rebooting PX4@tom It's probably normal afterall since the voxl-vision-hub service's config file contains a parameter "reset PX4 on error".
I set it to "false" and now this behaviour disappeared.")
-
Mavlink Mode on FC-V1Hey,
just to give a little update here:
I found out how to set the "force mavlink mode" variable in the voxl-vision-hub.conf which was forcing the parameter back in PX4, and simultaneously set it to "Normal" in PX4.
So far I don't see any downsides from using MAV_1_MODE=0 (normal).
I'm only making use of voxl-mavlink-server and voxl-vision-hub for the time being, basically to use VOXL's connectivity to send MAV commands to the PX4.
Do you think using "normal" will have any downsides?
The inconsistency between your documentation and the .conf and PX4 firmware files still exists though, so I'd really like to get some more insight on this.
Thanks and a great weekend to everyone.
-
Flight core integrate with a Wifi module?Hey the answer is yes.
I use DroneBridge for ESP32 but I believe there's a ton of other similar mavlink apps for ESPs.
cheers -
Flight Core w/ BMI088Hey Vinny,
no worries I'm not one to expect a full answer within an hour to anything I ask you know...
Thanks so much for clarifyiing this for me and I take it you wouldn't suggest using it since it's an older part?
From what I was able to compare so far I'd say using it together with the 42688p beats the 42688p/20602 combo noise wise but might also just be a hunch, I'll have to do more testing...
And yeah I think we do have quite a few boards with the two baros where one is on the Flight Core part and the other one on the opposite-end corner of the VOXL part.^^
Everything that's directly on the Flight Core portion is quite simple to talk to from a PX4 autopilot but everything VOXL-side would require wrapping it in the MPA I guess which also is totally out of my department.Sorry I'm rambling here, thanks again for the clarification and may you have a wonderful weekend.
chgeers -
Flight Core w/ BMI088Hi,
I know it's an old topic but I finally figured that by "DNI" in your IMU documentation you likely mean "did not include" ?
However,
I ihave checked the boards and a good third of the 20'ish VOXLs we own do have the BMI088 actually on there.
I've seen in your firmware repository that you plan on only using one IMU (the icm42688p) going forward so I just wanted to get your thoughts on the BMI088, if I do have it, is it worth running (too?! solely?!) compared to the 42688p?
thanks for any thoughts and cheers -
Mavlink Mode on FC-V1Hey there,
I recently stumbled upon some unclear and conflicting documentation and hope to get some insight from you guys:This is about the PX4 parameter that sets the mavlink mode to talk to VOXL on UART2 with the one-PCB solution:
I was used to it having to be set to "onboard" (value "2") as is covered in the general PX4'documentation-
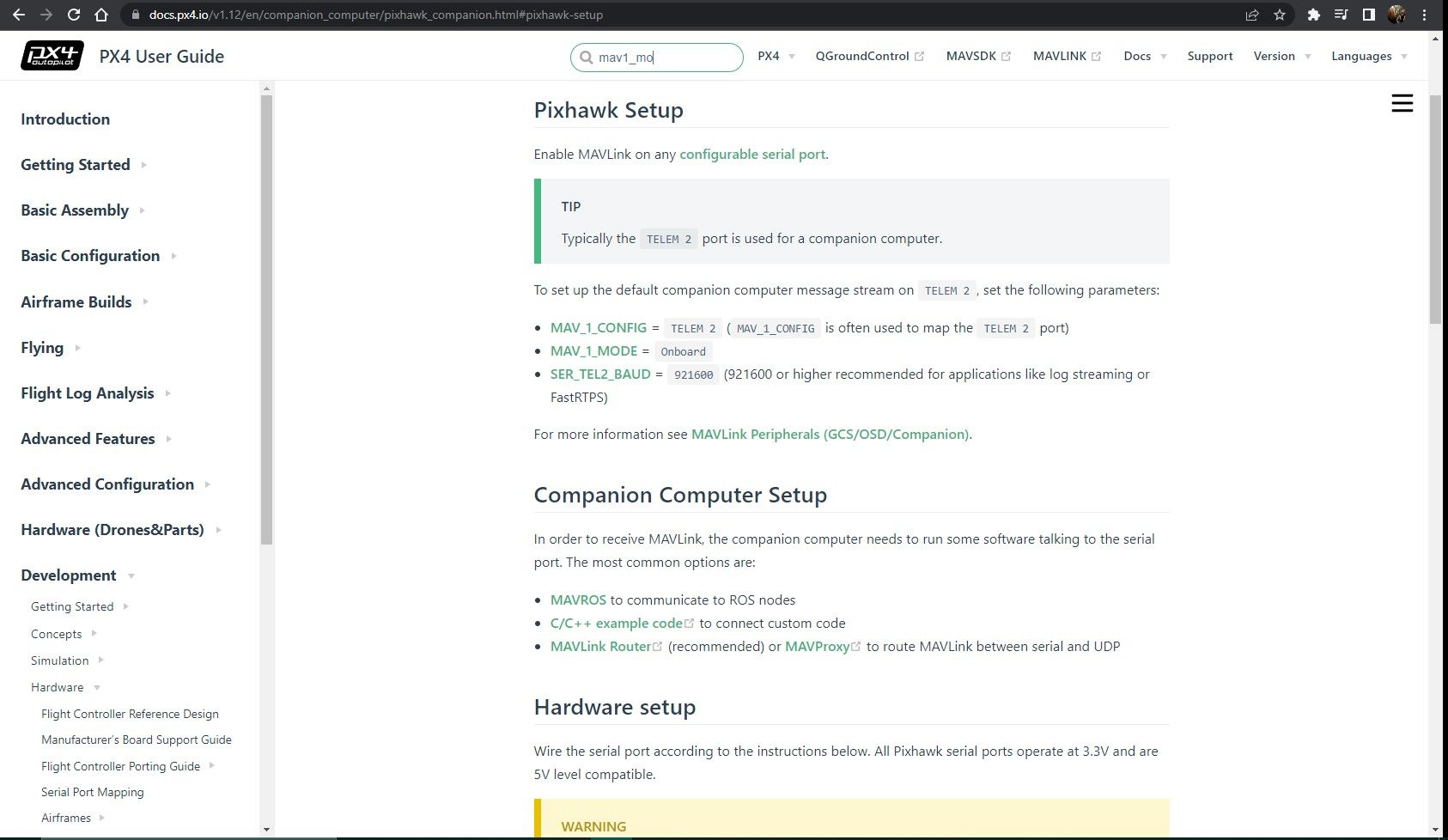
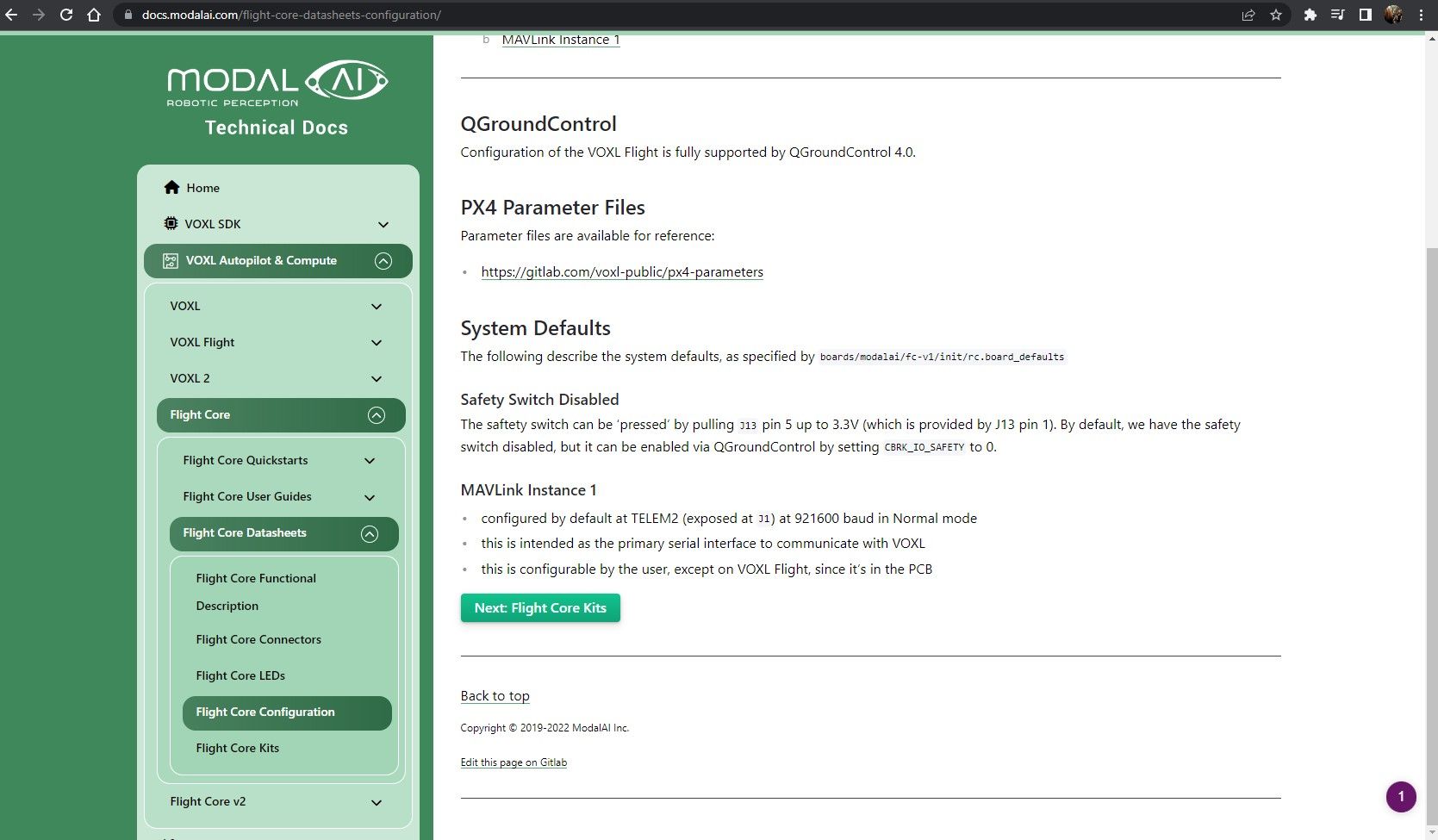
and used to be in your (ModalAI)'s documentation which recently got updated and now says "0" (Normal) as the mode for both Flight Core and VOXL Flight:
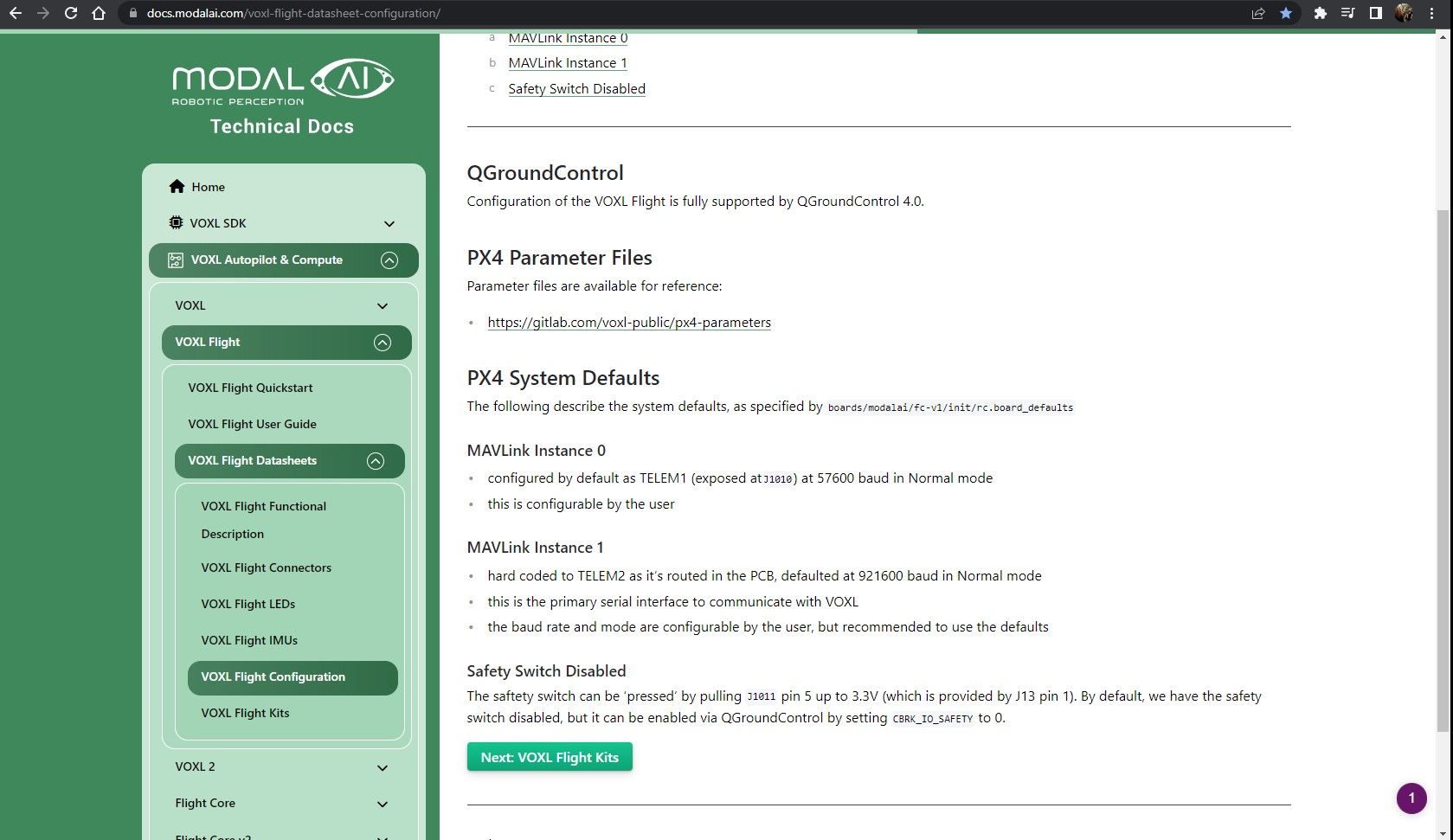
and
while the source code still includes "2" (Onboard) as the default parameter-
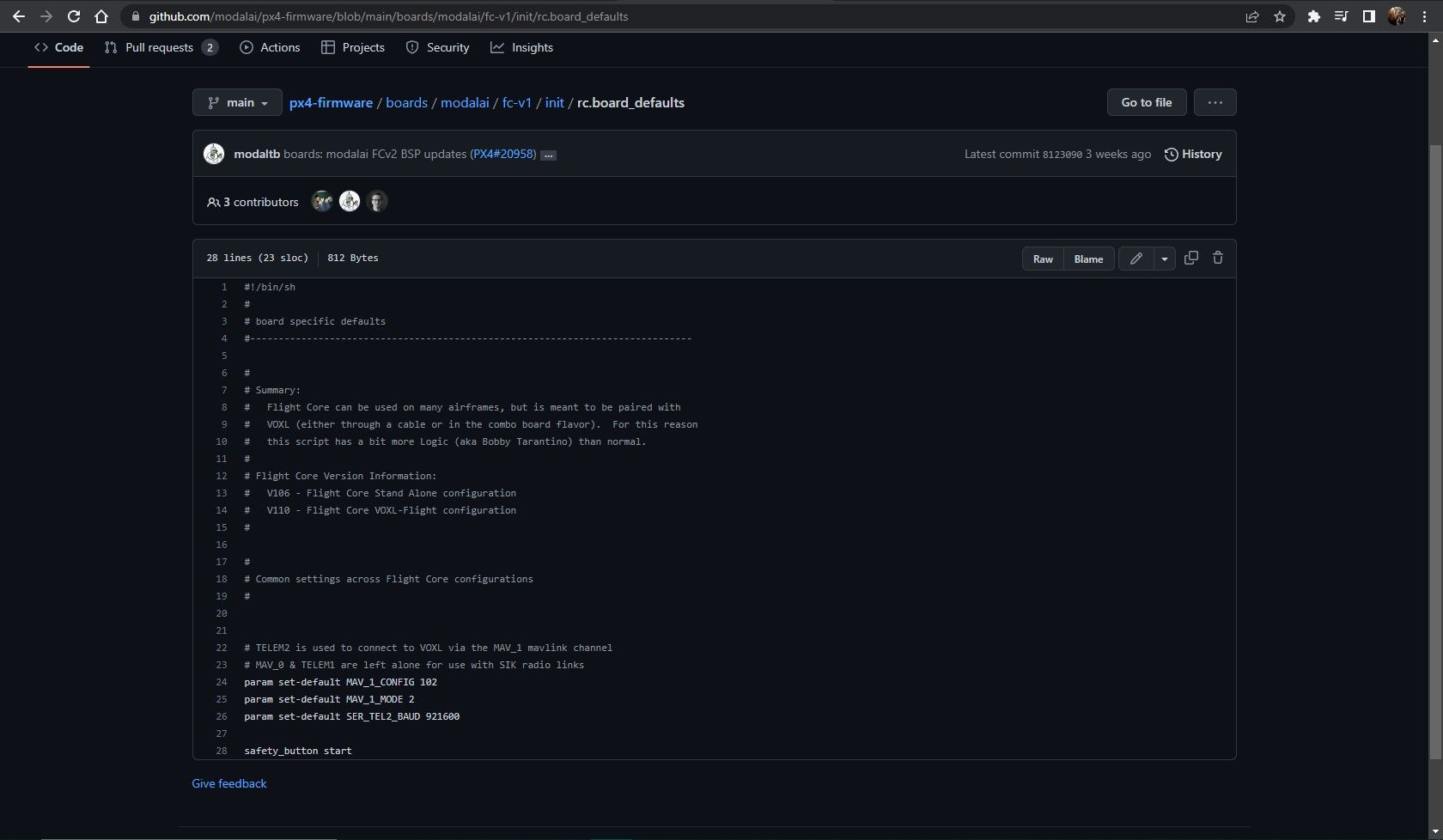
the picture shows your own repository but it's the same with all other branches as well.
Funny thing is - sometimes I can set this parameter afterwards and sometimes it just resets immediately. Not sure yet if that's dependant on the IMUs present or maybe the airframe selection or some other parameter...However,
I would like to know which is the desired Mavlink mode to set in PX4 for the UART that I want it to talk to the VOXL?
thanks and cheers. -
VOXL is rebooting PX4@tom Hi. This is on a VOXL Flight (VOXL 1 plus Flight core) and usually only happens when I'm on the PX4 main branch (I really don't think it ever happened on a stable version).
From what I gathered it results from a "Yaw estimate error".
For now I'm disabling the service via SSH, connect to PX4 over USB and use a long cable for calibration.
After both my mags are calibrated in this way I can actually repeat this calibration over wifi (because they're not reporting deviating values anymore it seems).
best regards -
RM3100 Magnetometer@modaltb Hey hey know it's been forever but just right now I finally got it working.
I adjusted the adress in the corresponding driver's .h file and now it's finally running.
thanks again for going through this with me.
cheers -
VOXL is rebooting PX4Hey everyone.
In regards to this behaviour I'd like to know if it is possible to disable this "check" in particular in the vision config somehow?
Because I really prefer calibrating over WiFi despite what QGC is recommending but calibration itself is just not possible because the VOXL just keeps rebooting the autopilot basically everytime you move it with uncalibrated IMUs/ Mags and without the service running you can't connect through Wifi.I am able to fiddle through calibration via USB but I really, really rather do it on a wireless link.
cheers -
CPU/GPU locations and thermalsHi ModalAI,
I'm about to setup some tests to check on the temperature on the pcb but I'm not quite sure where the GPU and the CPU is localized on the voxl. Can anyone tell me which component is the GPU and the CPU and if there's a well known temperature limit for these components? Right know I'm measuring temperatures around 100°C and above which is quite high. How much temperatures can they take and how does the system respond to overheating? Shut down or just decreasing the frequency?Thanks for your help!!
-
RM3100 MagnetometerHey, just giving some more information and a little bump since I'm still in desperate need of this compass working on my drone.
Please try and have another look into this for me if you could...
thanks so much and a perfect weekend for everyone.
cheersunit on bus:
Tried starting it manually to no avail:

-
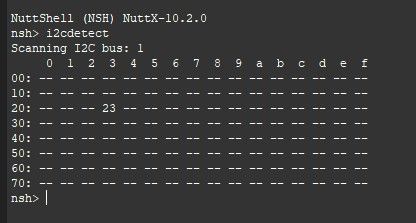
RM3100 Magnetometer@modaltb Hello there, I just wanted to give a little update here:
I managed to connect it in a way that it's now appearing on the I2C bus as 23 by putting a 10k resistor on vcc and the I2C-enable pin but it's still not being detected by PX4 as a magnetometer and I couldn't start it manually either.
I do see it on the bus just like with another mag ("gy-85" board using the QMC5883L and two other IMUs which also appear on the bus when scanned) but can't get it to start and work in PX4. -
IMU specifications and VIO performance documentation on VOXL@James-Strawson hello there James.
I've been dumbfounded by the "IMUs" page in your documentation for quite some time now so I'm very thankful that you took that on.^^Can you please clarify a few things for me here:
1:What do you mean by 'likely DNI'd' for Fligh Ccore IMU3?
Sorry, I actually don't know what that means.2: For now I'm only using the Flight Core -part of the VOXL-Flight so does that mean PX4 by itself is always only using the 20602 and the 42688p?
3: I've tried using the suggested command "voxl-configure-mpa" in an SSH shell, via ADB and in QGC's nutshell CLI but always get an error "command not found".
Where exactly would I use that? Using other "voxl-" related commands usually work no matter where I enter them so could you please maybe point me in the right direction?Here's the output when checking for present IMUs:
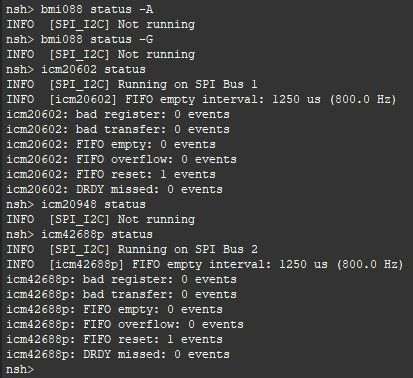
Thanks a lot for all your guys' work and a nice week to everyone. Cheers.
-
RM3100 MagnetometerHi ModalAI, ^^
I'm encountering issues with a certain compass on your flight controller.
I detailed the issue here link text
but in general I wonder, do you guys have any specific experience with this mag unit?I'll try and keep you updated. Thanks for your work, guys!