@Gary-Holmgren , camera server does not support rotating images by 90 degrees (or multiples of 90). You could do this yourself in your image processing application.
If you mount the cameras rotated by 90 degrees (while keeping the baseline along the left-right direction of the drone), you would need to modify your extrinsics to account for this rotation. If you perform a stereo camera calibration in this rotated configuration, then the output of the stereo calibration should give you the baseline result between the cameras in the Y direction in the camera frame (as opposed to X direction in normal case).
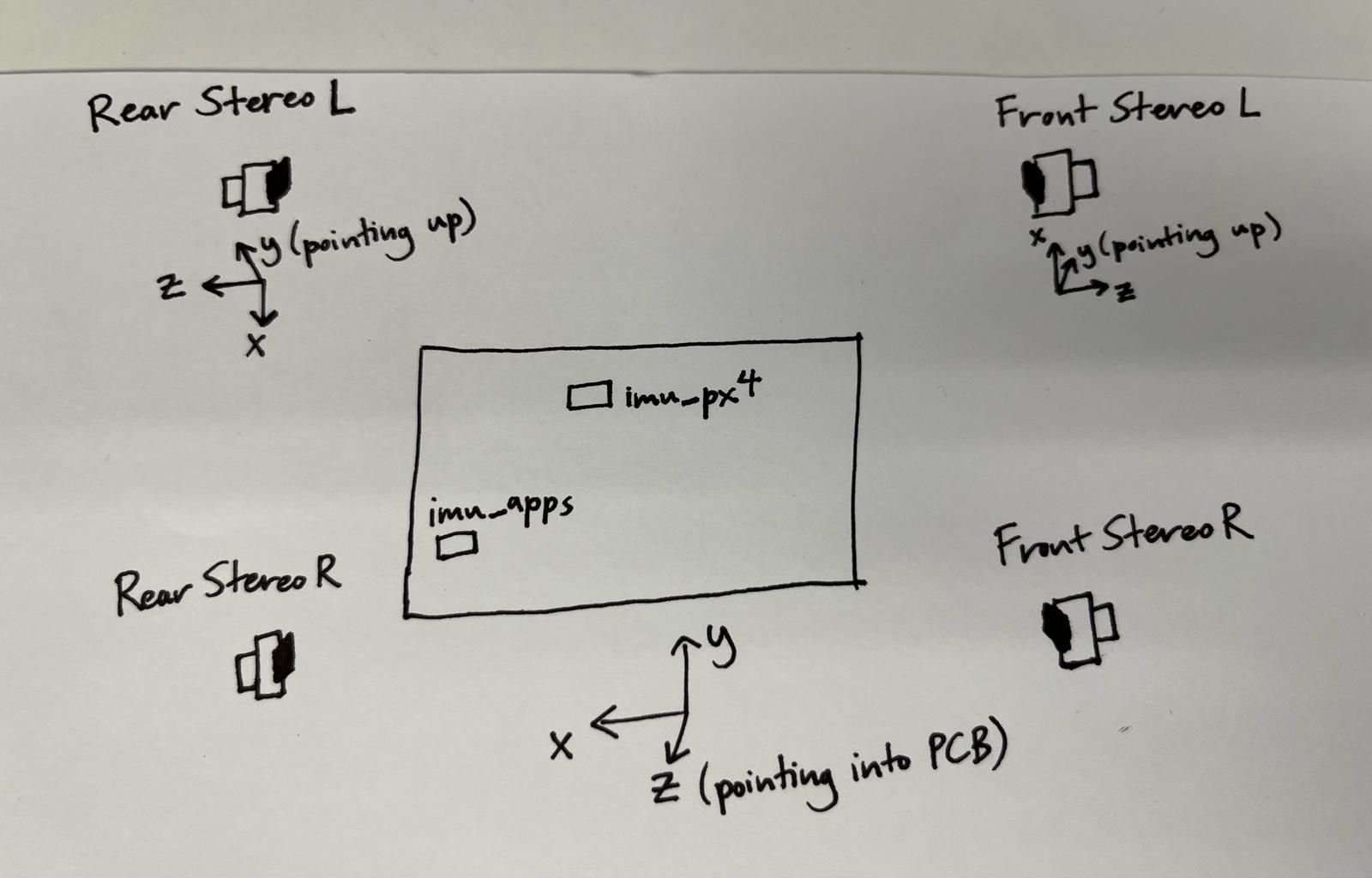
If you have a question about a specific configuration, please make a drawing that shows reference frames of the vehicle, imu, and both cameras and I can help you double check the extrinsics.
Alex