@jonathankampia Was able to configure the correct startup script as described here. Thanks!
Best posts made by Gary Holmgren
-
RE: voxl 2 external rangefinder compatibilityposted in Ask your questions right here!
-
RE: Holybro VL53L1X Lidar Support?posted in Ask your questions right here!
@Gary-Holmgren Figured it out, I hope this helps others with a similar setup.
I didn't notice before but in the usr/bin/voxl-px4-start script there is a comment:
# qshell vl53l1x start -X -b 4Which you can make or replace to change the DISTANCE_SENSOR condition to:
if [ "$DISTANCE_SENSOR" == "VL53L1X" ]; then # Make sure to set the parameter SENS_EN_VL53L1X to 1 qshell vl53l1x start -X -b 4 # qshell lightware_laser_serial start -d 7Then you can change the voxl-px4-conf to:
DISTANCE_SENSOR=VL53L1XAfter setting the relevant distance sensor / EKF2 params in QGC you should be able to restart voxl-px4 and the distance sensor will appear!
-
Holybro VL53L1X Lidar Support?posted in Ask your questions right here!
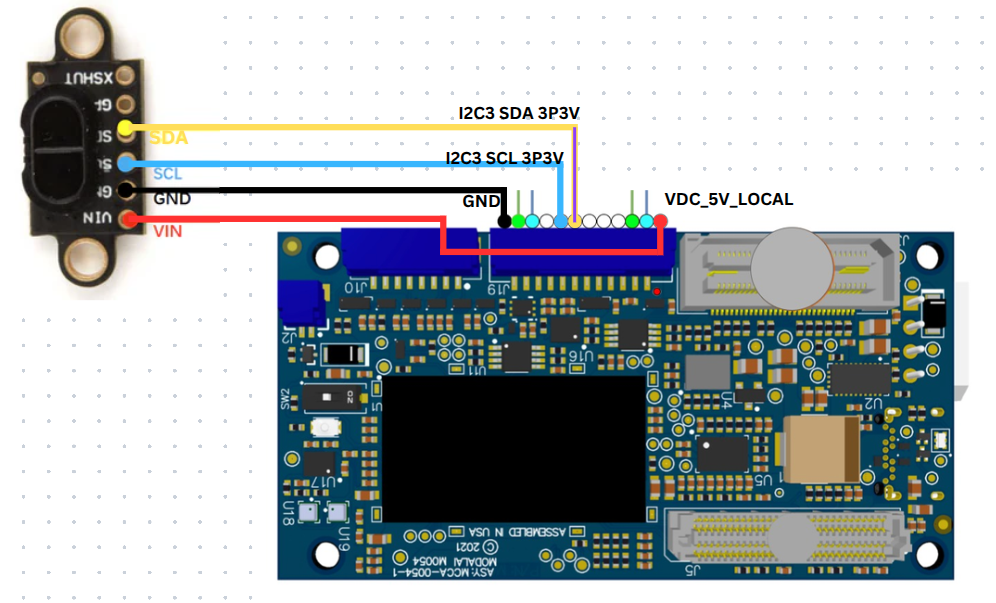
Hi i have been following along on this forum post about connecting an external rangefinder to VOXL 2's J19 QUP3 i2c connector for altitude/landing purposes. I have the Holybro version of this VL53L1X sensor. Supported in PX4. I am wondering if anyone else has tried to make this work directly with PX4 through the DSP.
I had tried editing the parameters for EKF2_HGT, and EKF2_RNG_CTL. As well as adding SENS_EN_VL53L1X 1 to the startup script. when I manually configure SENS_EN_VL53L1X 1 in QGC with the mavlink console (parameter is normally hidden) it works to enable it. However when I try to use SENS_EN_VL53L1X 1 in the voxl-px4.conf in EXTRA_STEPS=() file and restart voxl-px4 then QGC is no longer able to connect to voxl 2's px4 instance. Either way the distance sensor data is not being published or working correctly. I have triple checked my wiring to be as follows:
I also noticed for DISTANCE_SENSOR=NONE a comment states: "Options include: [NONE, LIGHTWARE_SF000] " is there a plan to include more options here or is this being replaced by the voxl-rangefinder-server.
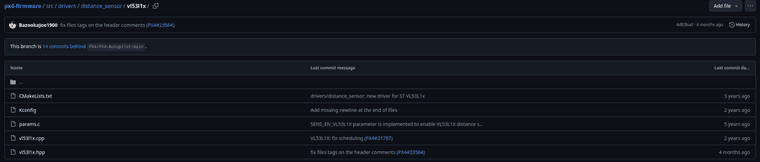
It appears ModalAi's forked PX4 does include the drivers for this as shown:
Latest posts made by Gary Holmgren
-
Triple IMX412 with Dual AR0144 on VOXL2?posted in Ask your questions right here!
Hi all,
Just wondering if the VOXL 2 has been tested with triple IMX412's for various hi-res angles and dual AR0144's with openVINS simultaneously.
Does this seem like a viable cam config?
-
Using VOXL Mini 4-in-1 ESC (UART) + VOXL 2 IO (PWM) at the same timeposted in Ask your questions right here!
Hi all, I’d like to run the VOXL Mini 4-in-1 ESC over UART with VOXL 2 and use the VOXL 2 IO expansion board to get a few extra PWM channels in PX4.
From the docs, the ESC uses J18 on VOXL 2. The IO board is also shown on J18 in some examples. Can I keep the ESC on J18 and put the IO board on J19 instead, then run both (voxl_esc on QUP2 and voxl2_io on QUP7) so I can map extra PWM outputs in QGC?
Hardware:
VOXL 2
VOXL Mini 4-in-1 ESC (UART)
VOXL 2 IO expansion board
If this is supported, are there any specific PX4 params or startup script changes I should make?Links for reference:
https://docs.modalai.com/voxl2-io-user-guide/
https://docs.modalai.com/voxl-mini-esc-datasheet/Thanks!
-
Possible to Buy Lepton breakout board?posted in Ask your questions right here!
Hi, I purchased the Starling 2 micro coax kit, and was wondering if there is any option to buy the Flir Lepton breakout that is included with the Starling 2?
In the CAD, it looks to be named M0157-SSS-LEPTON-RF-REVA.
Any info is appreciated, thanks!
-
RE: QVIO Flight violently unstableposted in Ask your questions right here!
@Alex-Kushleyev I have narrowed one of the main causes of instability down to my quads own frame (prop protectors) within the QVIO tacking FOV. Since I am using the AR0144 cam I modified the mask file in GIMP to include only 0 and 255 for the same aspect ratio of 1280x800 at full and 1.4 res to try to apply the mask in the qvio config file but no matter what I try it seems the mask is not affecting QVIO at all. I tired a fully blacked out mask as a test and it didn't change anything. I also ensured the header matching the format found in this post.
Have you gotten a mask example to work with the AR0144?
-
RE: QVIO Flight violently unstableposted in Ask your questions right here!
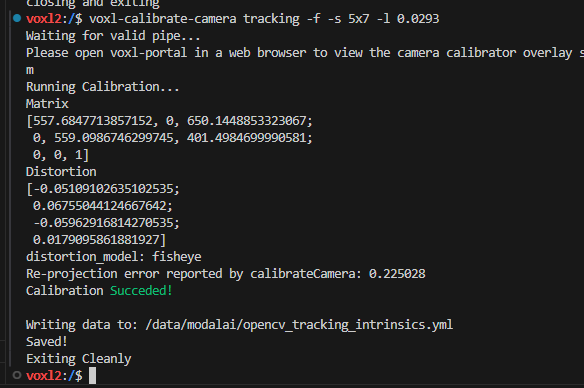
@Gary-Holmgren calibration results with AR0144
-
RE: QVIO Flight violently unstableposted in Ask your questions right here!
@Gary-Holmgren @Alex-Kushleyev Are you able to check this out I'm not sure what could be causing this. I had qvio working perfectly fine on this stack before.
-
RE: QVIO Flight violently unstableposted in Ask your questions right here!
Not sure why these would be outputting different roll values? could it be the cause of the forward and back oscillation that happens when I put it into position mode? The vehicle was completely still and I ran these commands within 10 seconds of each other.
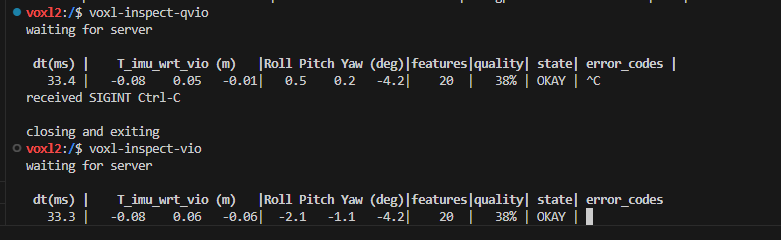
I also see that voxl-inspect-pose and inspect-vio are matching but qvio is not
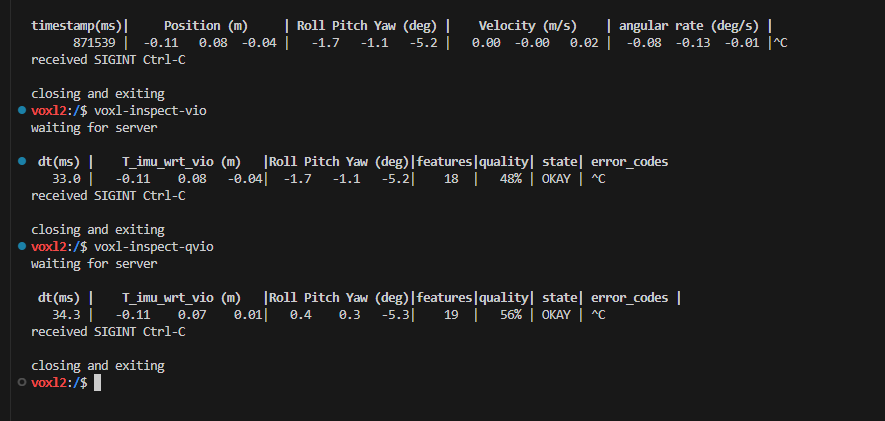
also, is this something that ha to be set in PX4 relative to IMU_APPS??

-
RE: Configuring VOXL 2 with a new UDP portposted in Ask your questions right here!
@Eric-Katzfey Ahh that makes more sense, thankyou for explaining!
-
RE: Configuring VOXL 2 with a new UDP portposted in Ask your questions right here!
@Eric-Katzfey My apologies I guess I am confused what you mean. I tried using MAVSDK with 14550 but it wouldn't let me connect. Also, I have QGC connected using 14550 if that matters.