Hi there, I would highly recommend upgrading to the latest SDK 1.6.2.
Q1: For voxl-vision-hub, openvins is just another [abstracted] VIO client, using the same MPA interface as QVIO. Thus, should work the same as QVIO.
Q2: There are no outstanding buffer conflicts between the 2 inputs in that SDK version. Though best to update to 1.6.2 as there have been numerous MPA improvements.
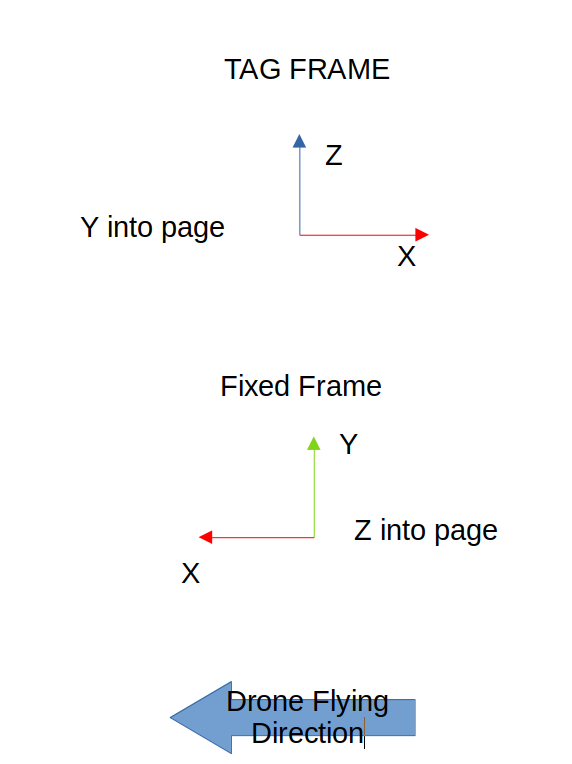
Q3: MAYBE ON GROUND, POSITION LOCK? is reporting that the barometer is reporting <1m and OVINS > 1m (-1 in NED space). It appears OVINS had a blow up, has recovered with a new origin in the local frame. Your output says it must have reseted in the ai/flying and hence the new local origin is above your landing point (fixed frame). Depending how you have PX4's EKF setup could lead to issues like the landing detector not working, or position error when running missions, hence why it's reported as a warning. Your output says it's at 0,0,-15 indicating OVINS restarted at ~15m up, but the PX4 baro says it's at 0. If outdoors, I recommend setting EKF2_HGT_REF = baro, if indoors, you'll need to reconcile a origin offset if VIO resets midair (qvio would require this as well) if using vio data directly waypoint manager (i.e. offboard waypoint mode or custom nav code)
Going forward if staying with 1.4.x,
edit /etc/modalai/voxl-open-vins-server.conf and change:
"en_vio_always_on": true,
ssh into the drone and run voxl-vision-hub --debug_fixed_frame --debug_tag_cam --debug_odometry to compare values and see if there is a error in calculation possibly causing vision-hub to restart.
move the drone around by hand, point it at a tag as needed and monitor the output from vision-hub. Should tell you where a possible conflict arises.