Hi guys,
We were using SDK 1.1.3, where we used the QVIO+ our pos fix (Only Z axis) to fly, so in addition to QVIO also used our own nav stack. Our fixed position was sent via a pipe to the modalai VISION-HUB
we sent the fix pose
to the
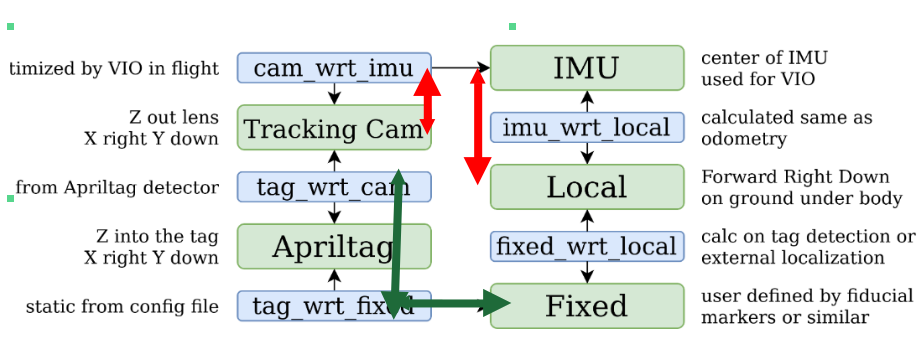
/run/mpa/vvhub_fixed_pose_input
it wokred well we flew hundreds of times with this setup were we publish to the fix pose pipe, fix the position of the drone and remove accumulated drift by the QVIO
in the vision-hub .conf we have:
set the fixed_frame_filter_len: 1 - cause we usually fix the position once in few seconds using tags.
set the en_transform_mavlink_pos_setpoints_from_fixed_frame: true
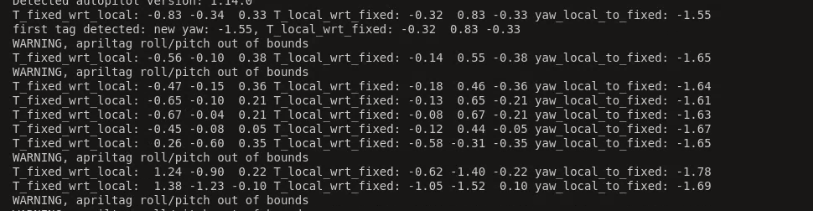
But now, after using the new DK 1.4.0 and using OPEN VINS + our fix it still works but occasionally our drone crashes we investigated and seems this fix might be responsible (we doubled check THE VALUES they were good )
- does the Open vins works well when we also publish to the /run/mpa/vvhub_fixed_pose_input?
- any major changes to VISION-HUB that could make its buffer full or something or race with conflicting positions between the fixed pipe and local pipe from open vins that can cause it maybe take an old fix of ours ?
We had this warning which might be related to crash
Thanks!
Jan 07 17:29:36 BALD voxl-open-vins-server[17387]: INFO: MAYBE ON GROUND, POSITION LOCK? -- INVOKE ESTOP! (This is just a warning) 0.000000 0.000000 -15.208726
Jan 07 17:29:36 BALD voxl-open-vins-server[17387]: INFO: MAYBE ON GROUND, POSITION LOCK? -- INVOKE ESTOP! (This is just a warning) 0.000000 0.000000 -15.208766
Jan 07 17:29:36 BALD voxl-open-vins-server[17387]: INFO: MAYBE ON GROUND, POSITION LOCK? -- INVOKE ESTOP! (This is just a warning) 0.000000 0.000000 -15.208140
Jan 07 17:29:36 BALD voxl-open-vins-server[17387]: INFO: MAYBE ON GROUND, POSITION LOCK? -- INVOKE ESTOP! (This is just a warning) 0.000000 0.000000 -15.206414
Jan 07 17:29:36 BALD voxl-open-vins-server[17387]: INFO: MAYBE ON GROUND, POSITION LOCK? -- INVOKE ESTOP! (This is just a warning) 0.000000 0.000000 -15.202729
Jan 07 17:29:36 BALD voxl-open-vins-server[17387]: INFO: MAYBE ON GROUND, POSITION LOCK? -- INVOKE ESTOP! (This is just a warning) 0.000000 0.000000 -15.197531