VOXL2 Doodle Labs Nano Integration
-
I have been recently working on integrating different communication modules with VOXL2 for custom applications. I'm planning to integrate Doodle Labs Nano along with VOXL2 due to smaller form compared to Mini. I have few questions regarding the same,
- In ModalAI documentation I see that, there is a demonstration shown with Doodle Labs Mini [link]. When integrating Nano, would it be the same connections in terms of hardware interfacing?
- My airframe setup includes a Flight Core V2 as an external flight controller along with VOXL2 as compute. In this case, where should, where should I connect the Doodle Labs mesh radio to? Would it be VOXL2 or Flight Controller?
-
@Jetson-Nano I haven't used the doodle labs nano myself but it appears like the pinout is the same as the mini so the same cable should work.
In the external_fc case you'd connect the doodle radio to the VOXL2 and then use configure voxl-vision-hub and voxl-mavlink-server to expect data from an external fc as opposed to onboard px4
-
Hi @Tom, thanks for reverting!
I have a few more questions regarding telemetry data streams, specifically w.r.t DoodleLabs module on the VOXL2.
In my current air-frame setup,
I'm using a ELRS 2.4 GHZ telemetry setup connecting to FlightCore V2 for RC Telemetry inputs and another wifi-telemetry for low-latency transmission of video data stream to ground control station. With this scenario I'm planning to replace Doodle Labs as a single unit telemetry module and want to understand,
-
Does the video feed use a separate data stream from the command and control (C2) link in telemetry communication? Or are both transmitted over the same link?
-
Also how is the data stream for MPA Camera interface being streamed as RTSP being sent to Ground Control Station?
For example, when using the Herelink Radio, the video feed is sent over a separate Ethernet data link, while the command and control signals use an SBUS or UART connection.
-
-
@Jetson-Nano If you end up switching from ELRS + wifi to just doodle labs then both video and C2 will be sent over the same link. Therefore if you lose doodle labs connection, you will lose both video and C2. If you want to do C2 with doodle labs you'll have to use some sort of USB joystick connected to your ground control station, if it doesn't already have it built in
In order to stream rtsp video from a voxl-camera-server MPA pipe you can user
voxl-streamer: https://gitlab.com/voxl-public/voxl-sdk/services/voxl-streamer -
@tom @Vinny, I have few more queries with respect to RC Telemetry's pipeline integration with Doodle Labs,
Considering there's Doodle labs communication between GCS and the aerial system, the RC and telemetry are over the Doodle Labs. But on the VOXL 2 IO board for the J3 port there is SBUS out, which I need to use to run the Gimbal. Will there be SBUS out even when doodle labs is used for RC and telemetry? If yes, how to get the SBUS out up on the IO board's J3 port?
-
-
Sorry @Jetson-Nano , this is not my area of expertise (anything software related, I'm just hardware). Hopefully someone else from the SW team can respond shortly for you.
-
@Jetson-Nano , VOXL2 IO board is capable of outputing SBUS signal, but currently the J3 port is only used as SBUS input.
What data are you trying to send out via SBUS and where is the data coming from?
Alex
-
@Alex-Kushleyev Thanks for sharing inputs. As said earlier, having the Doodle Labs module for the RC and Telemetry connection, I need to know whether its a separate pipeline for RC or its a
serial comfor both RC and telemetry.If the RC has a separate pipeline, I want to have the SBUS out on the J3 to get my Gimbal running. If you have any other inputs, pl share.
-
@Jetson-Nano Depends on what you mean by RC. If you are using a dedicated RC transmitter / receiver to control the drone then it is a separate thing. If you use a joystick with your ground control software then "RC" (or manual control) data is sent via Mavlink messages over the telemetry link.
-
@Eric-Katzfey I meant using a dedicated RC Transmitter/receiver to control the drone.
-
@Eric-Katzfey Could you kindly respond for this?
-
@Eric-Katzfey @Vinny @tom Also, I have a doubt regarding the hardware connections between VOXL2 and Doodle Labs Helix Nano module,
As depicted here,
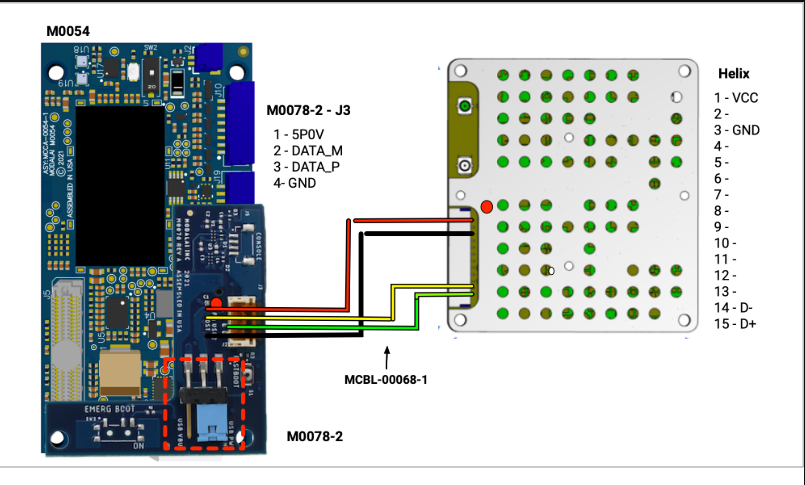
The Helix mini module is connected to VOXL2 through M0078-2 board. In terms of hardware connections its,
1- 5P0V - VCC(1)
2- DATA_M - D-(14)
3- DATA_P - D+(15)
4- GND - GND(3)In my setup, as mentioned earlier I'm using Nano Module and M00125_A USB3.0 Expander board.
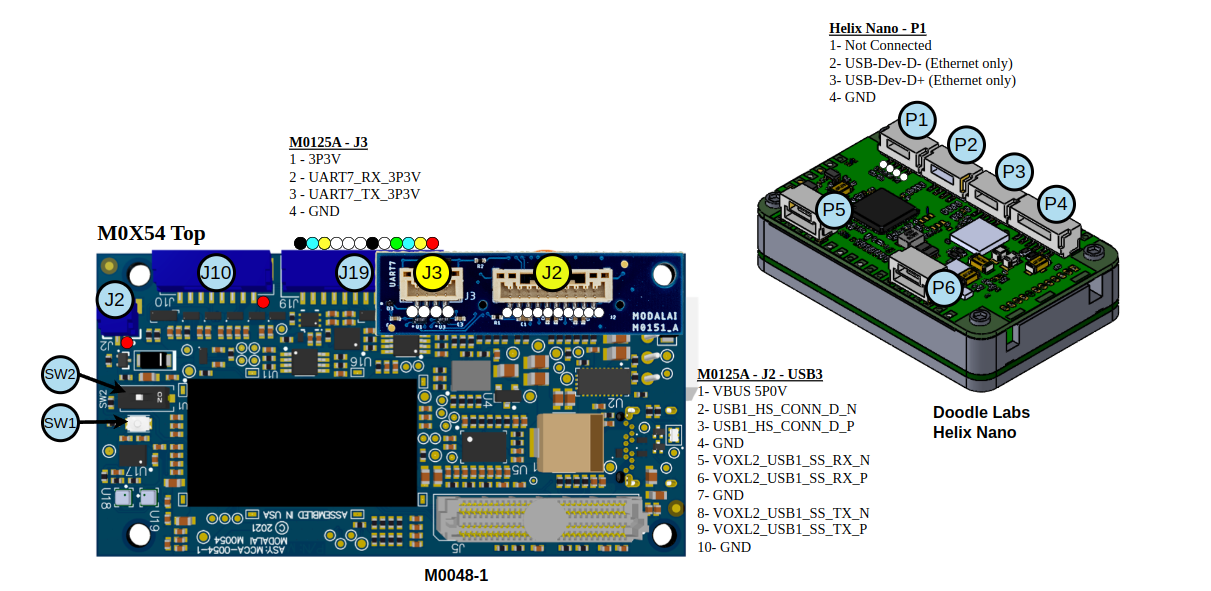
Over here, in M0125_A since there are no direct DATA_M, DATA_N ports on J3, how can I interface this with Nano Module? As per Doodle Labs Nano documentation, there are Ethernet ports which support higher data baud rates. Could I use them for interfacing?
Or would you suggest any specific ports from Nano for interfacing?
-
Hi @Jetson-Nano
Please see this cable page for more guidance.
https://docs.modalai.com/cable-datasheets/#mcbl-00085
Doodle is one of those applications which we give customers enough to start trying it, but we encourage a custom solution to fit your application(s).
Thanks!
Vinny