m500 VOXL Flight sdk update to v1.1.x
-
@Moderator Is the update procedure the same as this one for v1.14 firmware?
https://docs.modalai.com/update-flight-core-firmware/#update-procedure
Also since I dont have the desired cable if I want to fallback to v0.9.5 I don't need to change anything in the firmware right?
Also when I try to go back v0.9.5 sdk and configure my qvio it always shows this error.
/ # voxl-configure-qvio Starting Wizard Do you want to reset the config file to factory defaults? 1) yes 2) no #? 1 wiping old config file loading config file Creating new config file: /etc/modalai/voxl-qvio-server.conf Do you want to enable the voxl-qvio-server service to allow visual inertial odometry? 1) yes 2) no #? 1 Now we are going to do a preliminary configuration of /etc/modalai/voxl-qvio-server.conf Which config voxl-qvio-server use? imu0_tracking for VOXL Flight all-in-one board, M500 imu1_tracking for VOXL1 and VOXL-CAM, Seeker V1 imu_px4_tracking for RB5 Flight 5G imu_apps_tracking for VOXL2, Sentinel imu_apps_stereo_lower for Starling V2 stereo version 1) imu0_tracking 3) imu_px4_tracking 5) imu_apps_stereo_lower 2) imu1_tracking 4) imu_apps_tracking #? 1 enabling voxl-qvio-server systemd service starting voxl-qvio-server systemd service Done configuring voxl-qvio-server / # voxl-inspect-qvio waiting for server dt(ms) | T_imu_wrt_vio (m) |Roll Pitch Yaw (deg)|features|quality| state| error_codes | 30.2 | 0.00 0.00 0.00| 0.0 -0.0 0.0| 0 | -1% | FAIL | IMU_MISSING STALLED ^C received SIGINT Ctrl-C closing and exiting / # -
@Darshit-Desai your firmware should match what was used in the SDK, they are paired together
why would you go to SDK 0.9.5? It is really old and no longer supported
-
@Moderator I don't have the usb-jst connector for the firmware update and I think 0.95 that was the original factory sdk version
-
@Moderator said in m500 VOXL Flight sdk update to v1.1.x:
your firmware should match what was used in the SDK, they are paired together
What firmware matches the voxl-1 sdk 1.1.2 version
-
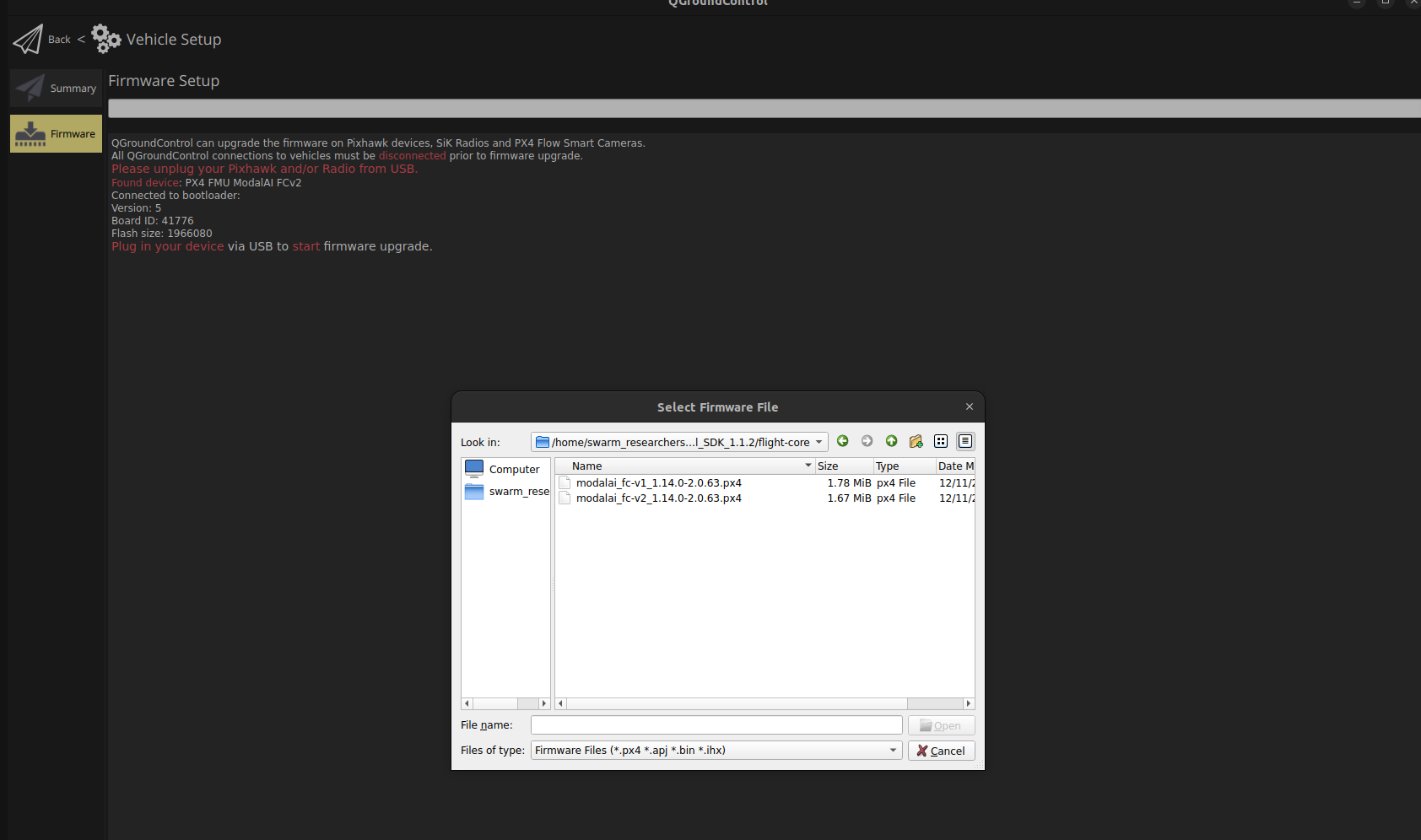
@Moderator I have got the cable for flight core update, I upgraded the sdk to 1.1.2 again but then I am following the instructions as shown in the below but nothing shows up in the firmware tab
https://docs.modalai.com/update-flight-core-firmware/#update-using-qgroundcontrol---mainline-builds
-
@Darshit-Desai The .px4 file is in the SDK release zip:
for FCv1:
voxl_SDK_1.1.2/flight-core/modalai_fc-v1_1.14.0-2.0.63.px4Follow the instructions here (ModalAI Build) with the above .px4 file:
https://docs.modalai.com/update-flight-core-firmware/#update-using-qgroundcontrol---modalai-build
-
@tom Yes but in the firmware page nothing shows up in QGC
@tom said in m500 VOXL Flight sdk update to v1.1.x:
https://docs.modalai.com/update-flight-core-firmware/#update-using-qgroundcontrol---modalai-build
-
@Darshit-Desai Did you unplug power and re-connect power while keeping USB attached?
-
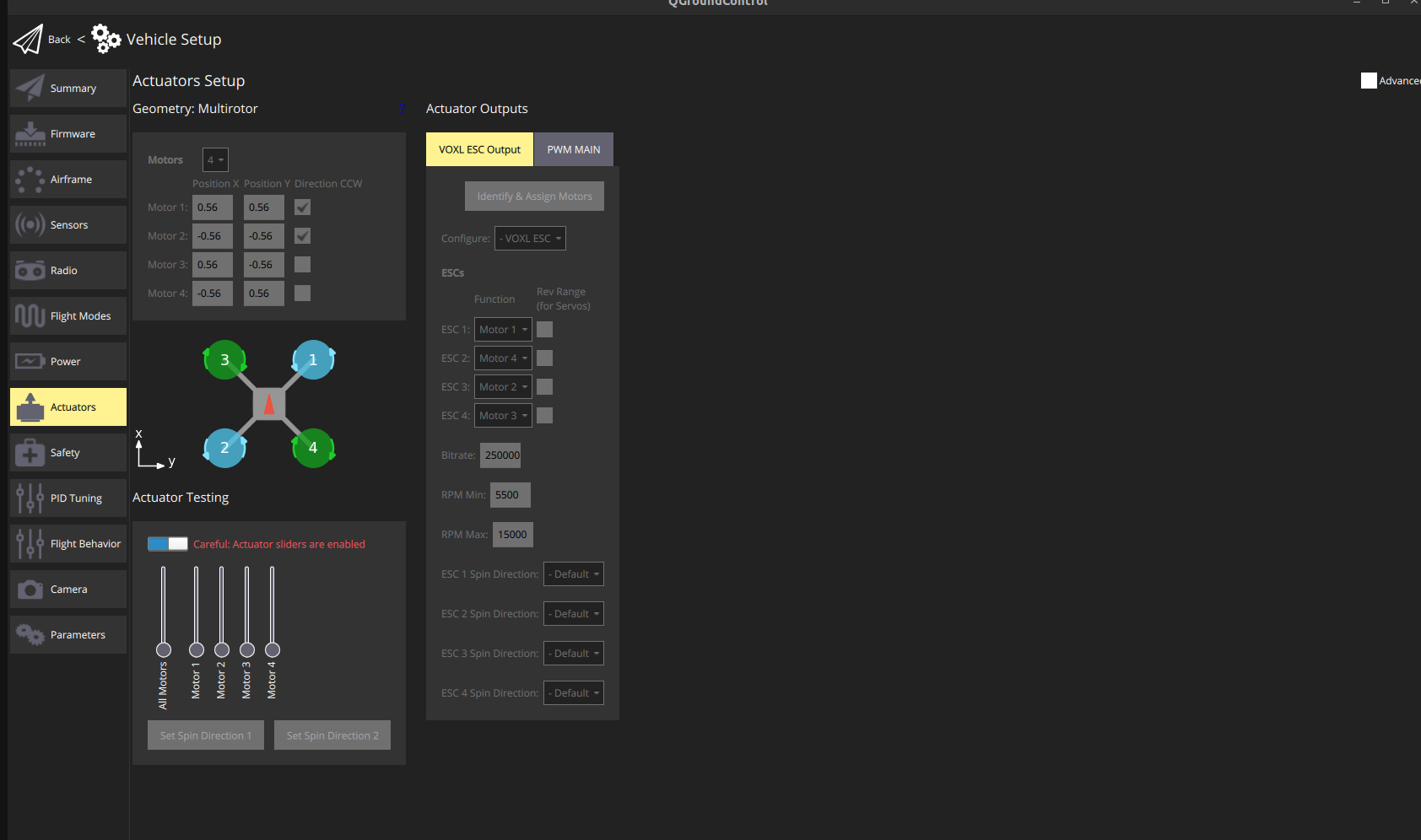
@tom I was able to finish the upgrade, but in QGC it shows something about actuators, when I open it opens the esc calibration related page, Do I need to calibrate esc again?
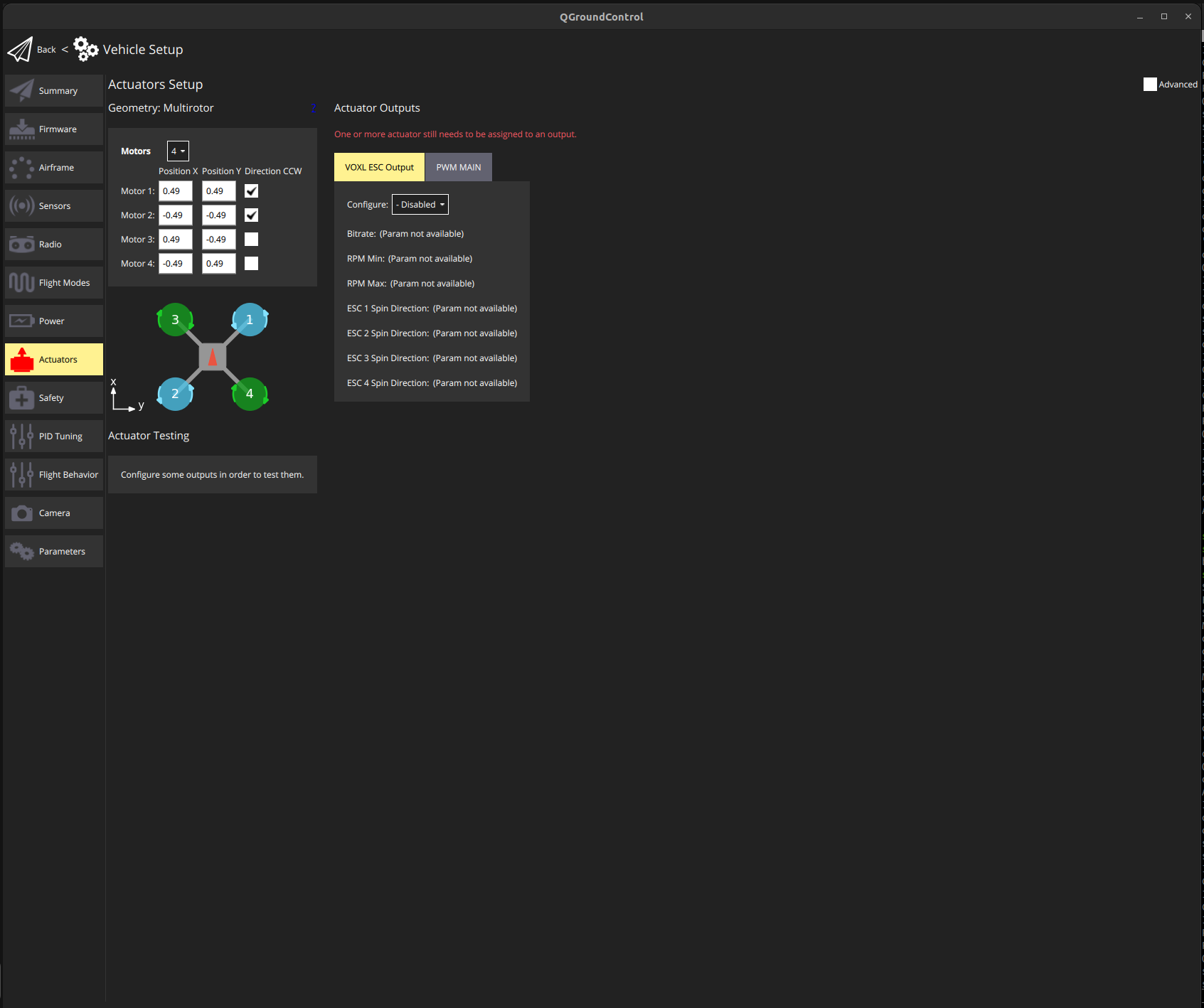
Edit: I found this page (https://docs.modalai.com/modal-esc-px4-user-guide/) on ESCs and added the parameters accordingly, the only ones I don't know are the min and max RPM, I am using the voxl 1 m500 with holybro 2216-920kv motors. Also I don't think the motors rotate when I try to using the sliders
-
@Darshit-Desai
Can you try loading the FCv1 m500 params from here: https://gitlab.com/voxl-public/voxl-sdk/utilities/voxl-px4-params/-/blob/master/params/v1.14/platforms/M500_FCV1.params -
@tom V1 or V2? Because when I flash firmware it detects v2
-
@Darshit-Desai Sorry yes v2 https://gitlab.com/voxl-public/voxl-sdk/utilities/voxl-px4-params/-/blob/master/params/v1.14/platforms/M500_FCV2.params
-
@tom It's hard for me to follow which hardware you have, so whichever one you have v1 or v2
-
@tom Yes I am also not sure what came with m500 I recently bought because the earlier ones had v1
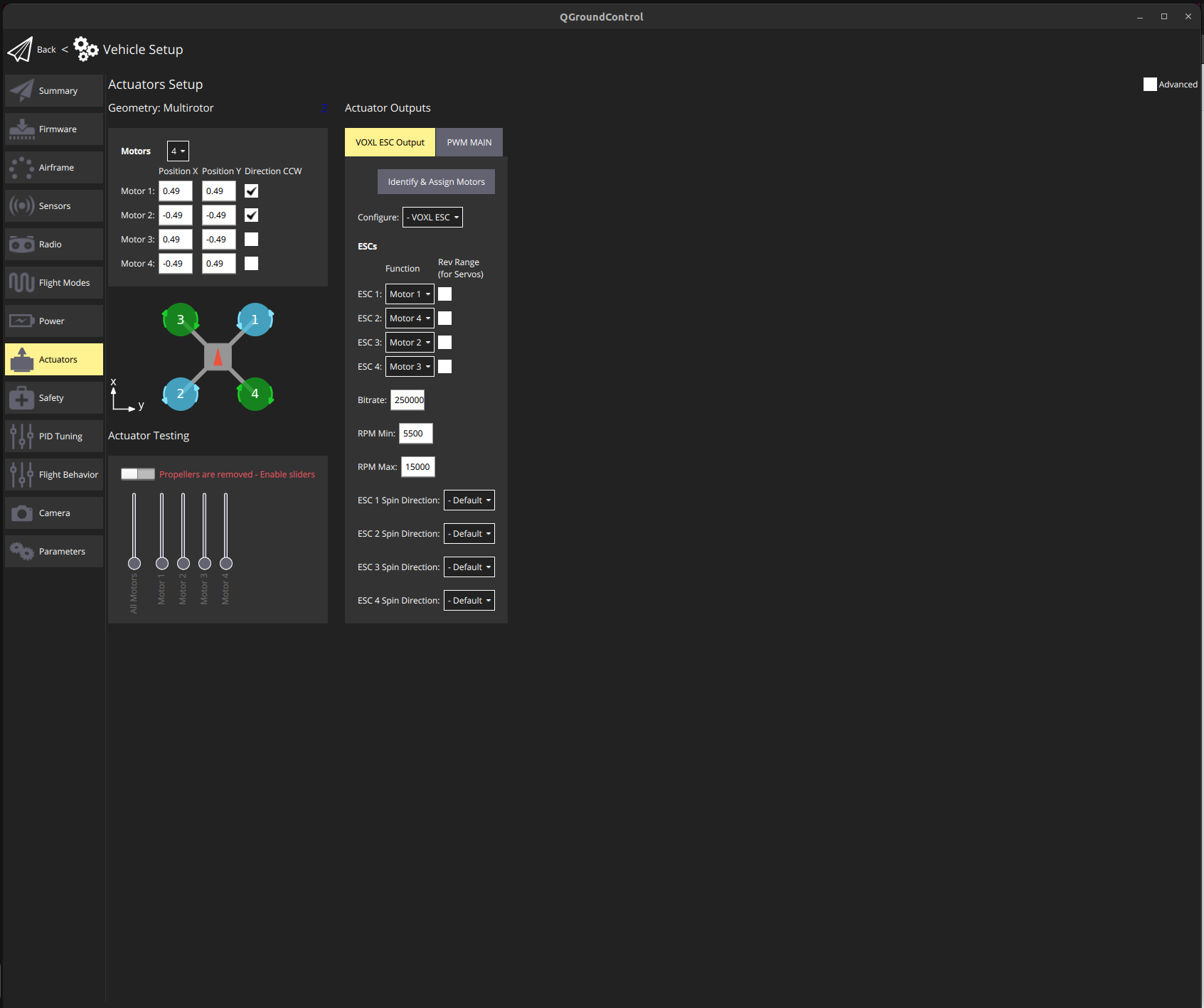
Edit: The motor issue was resolved with this and I can spin the motors, I will have a flight with the propellers and confirm it
-
@tom On the next reboot it's showing esc failure in the logs
[13:38:12.651] Info: Kill-switch engaged
[13:38:13.768] Info: Kill-switch disengaged
[13:39:33.963] Info: Armed by RC
[13:39:34.096] Info: logging: opening log file sess114/log100.ulg
[13:39:34.296] Critical: Failsafe activated, triggering disarm
ESC failure
[13:39:34.296] Info: Disarmed by failsafe
[13:39:36.780] Info: Armed by RC
[13:39:36.781] Info: logging: opening log file sess114/log101.ulg
[13:39:37.131] Critical: Failsafe activated, triggering disarm
[13:39:37.131] Info: Disarmed by failsafe
[13:39:39.424] Info: Armed by RC
[13:39:39.465] Info: logging: opening log file sess114/log102.ulg
[13:39:39.787] Critical: Failsafe activated, triggering disarm
[13:39:39.787] Info: Disarmed by failsafeAnd the motors try to spin up for a few seconds when arming and then instantly stop
When I move this sliders now the motors rotate but when I try to arm the drone using RC it shows the ESC failure error
-
D Darshit Desai referenced this topic on
-
@Darshit-Desai If you upload the px4 log someone on our team can analyze it
-
@tom By px4 log you mean the one mentioned in the post earlier, How can I access the log file which is mentioned here in the QGC log?
@Darshit-Desai said in m500 VOXL Flight sdk update to v1.1.x:
[13:38:12.651] Info: Kill-switch engaged
[13:38:13.768] Info: Kill-switch disengaged
[13:39:33.963] Info: Armed by RC
[13:39:34.096] Info: logging: opening log file sess114/log100.ulg
[13:39:34.296] Critical: Failsafe activated, triggering disarm
ESC failure
[13:39:34.296] Info: Disarmed by failsafe
[13:39:36.780] Info: Armed by RC
[13:39:36.781] Info: logging: opening log file sess114/log101.ulg
[13:39:37.131] Critical: Failsafe activated, triggering disarm
[13:39:37.131] Info: Disarmed by failsafe
[13:39:39.424] Info: Armed by RC
[13:39:39.465] Info: logging: opening log file sess114/log102.ulg
[13:39:39.787] Critical: Failsafe activated, triggering disarm
[13:39:39.787] Info: Disarmed by failsafe -
@Darshit-Desai The logs can be downloaded through QGroundControl: https://docs.px4.io/v1.11/en/getting_started/flight_reporting.html#downloading-logs-from-the-flight-controller
-
@tom Here's the ulog file link,
https://drive.google.com/file/d/1vuy_Ut0h_rEZDWseDgeywE093CISo9RB/view?usp=sharing
-
@Darshit-Desai Our m500 also showed something needed to be done with the acutator after updgrade to 1.14. But after loading the parameters (assuming you are using fcv2) and then reboot and it is okay.
p.s. I vaguely rember having to do "loading parameters and rebooting" twice to get everything done. But I'm not very sure about this just I have this impression.