avoidance collision prevention disabled
-
@AP123 might be worth trying this to see if the voxl-vision-px4 is handling the avoidance data correctly: https://docs.modalai.com/voxl-vision-px4-collision-prevention-0_9/#debugging-collision-prevention
-
@tom The data is flowing properly but QGC is still saying Not Ready, and Avoidance system not ready. What else can i do?
-
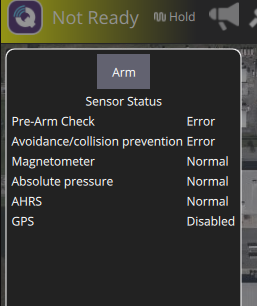
@AP123 When you click on Not Ready does it give you any more info?
-
@tom it does not, I'm trying to read errors in the log but there are so many and none say anything relating to avoidance system.
-
@AP123 What hardware setup are you using? One of our drones or a custom setup?
-
@tom custom setup. I have calibrated the front stereo but the rear is giving me issues could that be why?
-
@AP123 It's possible, I would take a look here as well for some relevant info: https://docs.modalai.com/configure-extrinsics/
-
@tom Thank you i will take a look at that today. The error i am getting the most in the logs is this one
[E] at qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42 - "qrc:/qml/QGroundControl/FlightDisplay/ObstacleDistanceOverlayMap.qml:42: Error: createRadialGradient(): Incorrect arguments"
Is that something to do with the avoidance system?
Thank you
-
@tom hey tom when i send voxl-inspect-points tof_pc to the voxl the output is only waiting for server at /run/mpa/tof_pc/
no data is seen, is this the issue? -
@tom i discovered if there are objects in the surrounding of the drone object avoidance reads disabled, yet if it is in open space it reads error.
-
@AP123 I'm at the end of my personal knowledge with VOA, I'll see if I can tag someone in
-
@tom Both brand new voxl 2 units from you guys 1 with SDK 0.9.5 and 1 with SDK 1.0.0 are both saying avoidance system not ready, one of your engineers must have encountered this before.
-
@AP123 Hey there. Are you running VOA against a stereo camera pair or via a ToF sensor?
If you run
voxl-inspect-points voa_pc_outand see data, then the voxl2 SDK services are good and generating the correct mavlink obstacle distance points to PX4. If not then there's a configuration issue.If that is good, then you need to make sure PX4 has
MPC_POS_MODE= Simple pos control or smooth pos control,COM_OBS_AVOIDis enabled,CP_DIST> 0 (e.g. 2) and you must have an established home position (or good position from qvio if that is the case). Typically an "obstacle system not ready" is due to the MPC_POS_MODE (I think we default to acceleration-based input).If all those check out, then it's likely missing a home position requirement in PX4 & not voxl, and we'll need to look that up.
-
@Cliff-Wong said in avoidance collision prevention disabled:
voxl-inspect-points voa_pc_out
Thank you Cliff for your support, everything is set properly and i am getting data from oxl-inspect-points voa_pc_out.

Isn't home position set once i arm the drone? How can i do that if it wont let me arm it?
-
@AP123 We just released SDK 1.1 yesterday which contains a few months worth of bug fixes, I would recommend loading that and seeing if your issue is resolved
-
@tom is it compatible with the PWM board 0065?
-
@AP123 No, didn't realize you were tackling that as well. M0065 PWM support will be in SDK 1.1.1 and we're actively polishing / testing that release and hope to have it out in the next couple weeks
-
@tom Yes i was having a bit of an issue with the ESC 4 in 1 so i stuck to the 0.9.5 SDK and PWM board. Does 1.1.0 address any ESC 4 in 1 issues?
-
@AP123 We don't have any known issues with the 4 in 1 escs. If you have an issue can you open a new thread?
-
@tom i just flashed my other voxl 2 to the 1.1.0, i like how you guys simplified the setup process for sure with the GPS, MPA, WIFI, camera and ESC setup. Although after i ran the command systemctl enable voxl-dfs-server and rebooted the drone. The data for the DFS was flowing but still, avoidance system not ready.
I did all this:
"MPC_POS_MODE = Simple pos control or smooth pos control, COM_OBS_AVOID is enabled, CP_DIST > 0 (e.g. 2) and you must have an established home position (or good position from qvio if that is the case). Typically an "obstacle system not ready" is due to the MPC_POS_MODE (I think we default to acceleration-based input)."
Do you have a brand new drone sitting somewhere you can unbox to try to reproduce this issue? I didn't have my ESC board on it and the PWM isn't compatible yet could that be the issue? I wish you guys would make a video of setting it up not just flying it around the office.