GPS not working
-
@daniel I think that's all I did, but here is my
/etc/modalai/voxl-px4.config, in case you want to look for any differences:#!/bin/sh # PX4 commands need the 'px4-' prefix in bash. # (px4-alias.sh is expected to be in the PATH) . px4-alias.sh # Figure out what platform we are running on. # Eventually there will be a utility called voxl-platform that will # return the platform tag or an error code. This utility is not yet # ubiquitous so it may be that it isn't available. Trying to call a # non existent program will generate an error code by the OS. If the # program exists and doesn't return an error code then use the results. PLATFORM=`/usr/bin/voxl-platform 2> /dev/null` RETURNCODE=$? if [ $RETURNCODE -ne 0 ]; then # If we couldn't get the platform from the voxl-platform utility then check # /etc/version to see if there is an M0052 substring in the version string. If so, # then we assume that we are on M0052. Otherwise assume M0054. VERSIONSTRING=$(</etc/version) M0052SUBSTRING="M0052" if [[ "$VERSIONSTRING" == *"$M0052SUBSTRING"* ]]; then PLATFORM="M0052" else PLATFORM="M0054" fi fi # We can only run on M0052 or M0054 so exit with error if that is not the case if [ $PLATFORM = "M0052" ]; then /bin/echo "Running on M0052" if [ "$RC" == "CRSF" ]; then /bin/echo "Error, crossfire not supported on M0052!" exit 0 fi elif [ $PLATFORM = "M0054" ]; then /bin/echo "Running on M0054" else /bin/echo "Error, cannot determine platform!" exit 0 fi uorb start muorb start # In order to just exit after starting the uorb / muorb modules define # the environment variable MINIMAL_PX4. (e.g. export MINIMAL_PX4=1) # This is useful for testing / debug where you may want to start drivers # and modules manually from the px4 command shell if [ ! -z $MINIMAL_PX4 ]; then /bin/echo "Running minimal script" exit 0 fi # Sleep a little here. A lot happens when the uorb and muorb start # and we need to make sure that it all completes successfully to avoid # any possible race conditions. /bin/sleep 1 # IMU (accelerometer / gyroscope) # Start this first because it gets the high rate interrupts coming in to the # DSP. Without this the DSP will oversleep and miss critical timeouts. # TODO: Why is that the case? if [ "$IMU" == "ROTATE_IMU_YAW_180" ]; then /bin/echo "Starting IMU driver with yaw 180 rotation" qshell icm42688p start -s -R 4 else qshell icm42688p start -s fi /bin/sleep 1 # Load in all of the parameters that have been saved in the file param load # Start logging and use timestamps for log files when possible. # Add the "-e" option to start logging immediately. Default is # to log only when armed logger start -t # We do not change the value of SYS_AUTOCONFIG but if it does not # show up as used then it is not reported to QGC and we get a # missing parameter error. param touch SYS_AUTOCONFIG # Start all of the device drivers on DSP # Magnetometer if [ "$GPS" == "MATEK" ]; then # Use this line for the magnetometer in the Matek Systems M8Q-5883 module /bin/echo "Starting Mateksys M8Q-5883 magnetometer" qshell qmc5883l start -R 10 -X -b 1 elif [ "$GPS" == "HERE3" ]; then # Use this line for the magnetometer in the Here3 GPS module /bin/echo "Starting Here3 ak09916 magnetometer" qshell ak09916 start -R 2 -X else # Use this line for the magnetometer in the Holybro GPS module /bin/echo "Starting Holybro magnetometer" qshell ist8310 start -R 10 -X -b 1 fi # LED driver for the Pixhawk 4 GPS module # Older units have i2c address 0x39 (57) and newer ones 0x38 (56) # M0054 only supports the newer one. M0052 can support either. if [ $PLATFORM = "M0052" ]; then qshell rgbled_ncp5623c start -X -b 1 -f 400 -a 57 fi if [ "$GPS" == "HOLYBRO" ]; then /bin/echo "Starting Holybro LED driver" qshell rgbled_ncp5623c start -X -b 1 -f 400 -a 56 elif [ "$GPS" == "HERE3" ]; then # Use this line for the Here3 GPS module LED controller /bin/echo "Starting Here3 LED" qshell rgbled start -X -f 400 fi # Barometer qshell icp10100 start -I -b 5 # ESC driver # We start this even if there is a PX4IO module. If there is # a PX4IO (M0065) module it will be plugged into the RC port # and so this driver will output commands on an empty port. qshell modalai_esc start qshell mixer load /dev/uart_esc quad_x.main.mix # APM power monitor qshell voxlpm start -X -b 2 # On M0052 the GPS and RC drivers run on the apps processor if [ $PLATFORM = "M0052" ]; then # Pixhawk 4 GPS module gps start -d /dev/ttyHS2 # RC input may be coming via either an external M0065 (aka px4io) module # or a directly attached Spektrum receiver. First see if the M0065 is detected. px4io detect PX4IO_STATUS=$? /bin/echo "PX4IO detect returned value $PX4IO_STATUS" if [ $PX4IO_STATUS -eq 0 ]; then /bin/echo "Found M0065, starting px4io" # On M0052 px4io only supports RC input, not PWM output px4io start else /bin/echo "M0065 not detected, starting Spektrum RC driver" spektrum_rc start -d /dev/ttyHS1 fi # On M0054 the GPS and RC drivers run on SLPI DSP else if [ "$GPS" == "MATEK" ]; then # Use this gps start line instead for Matek Systems M8Q-5883 module /bin/echo "Starting Mateksys M8Q-5883 GPS" qshell gps start elif [ "$GPS" == "HERE3" ]; then # Use this line for the Here3 GPS module /bin/echo "Starting Here3 GPS" qshell gps start else # Only the newer Holybro unit is supported on M0054 /bin/echo "Starting Holybro GPS" qshell gps start fi # If RC is TBS Crossfire then start its driver. # Otherwise, it could be either a directly connected Spektrum receiver # or an external M0065 (aka px4io) module. if [ "$RC" == "CRSF_MAV" ]; then /bin/echo "Starting TBS crossfire RC - MAV Mode" qshell tbs_crossfire start -m -p 7 -b 115200 elif [ "$RC" == "CRSF_RAW" ]; then /bin/echo "Starting TBS crossfire RC - CRSF Mode" qshell tbs_crossfire start -c -p 7 -b 250000 else qshell px4io detect PX4IO_STATUS=$? if [ $PX4IO_STATUS -eq 0 ]; then /bin/echo "Found M0065, starting px4io" # On M0054 we also support PWM output from M0065 (aka PX4IO) # If there are no pwm escs then that connector will be empty. qshell px4io start qshell px4io recovery qshell mixer load /dev/px4io quad_x_io.main.mix sleep 1 qshell pwm rate -c 1234 -r 400 qshell pwm disarmed -c 1234 -p 900 qshell pwm min -c 1234 -p 1060 qshell pwm max -c 1234 -p 2000 qshell pwm failsafe -c 1234 -p -1 -d /dev/px4io else /bin/echo "M0065 not detected, starting Spektrum RC driver" qshell spektrum_rc start -d 8 fi fi fi /bin/sleep 1 # Start all of the processing modules on DSP qshell sensors start qshell ekf2 start qshell mc_pos_control start qshell mc_att_control start qshell mc_rate_control start qshell mc_hover_thrust_estimator start qshell land_detector start multicopter /bin/sleep 1 # Start all of the processing modules on the applications processor rc_update start dataman start navigator start commander start commander mode manual # This is needed for altitude and position hold modes flight_mode_manager start # Start our service to update system time from GPS modalai_gps_timer start # As of 1.4.11 mavlink configuration has been changed!!! All communications are # now done via the mavlink server and voxl-vision-px4!!! param set MAV_BROADCAST 0 if [ "$RC" == "CRSF_MAV" ]; then # Slow everything way down if we are using TBS Crossfire mavlink start -a -x -u 14556 -o 14557 -r 10000 -n lo -m minimal /bin/sleep 1 else mavlink start -x -u 14556 -o 14557 -r 100000 -n lo -m onboard /bin/sleep 1 # slow down some of the fastest streams in onboard mode mavlink stream -u 14556 -s HIGHRES_IMU -r 10 mavlink stream -u 14556 -s ATTITUDE -r 10 mavlink stream -u 14556 -s ATTITUDE_QUATERNION -r 10 # speed up rc_channels mavlink stream -u 14556 -s RC_CHANNELS -r 50 /bin/sleep 1 fi if [ $PLATFORM = "M0052" ]; then # Start up the IMU server to support VIO. This is done differently on M0054 imu_server start fi mavlink boot_complete # For now we use a mavlink bridge for TBS Crossfire support if [ "$RC" == "CRSF_MAV" ]; then mavlink_bridge start fi # Optional MSP OSD driver for DJI goggles # This is only supported on M0054 (with M0125 accessory board) if [ $PLATFORM = "M0054" ]; then if [ "$OSD" == "OSD" ]; then /bin/echo "Starting OSD driver" msp_osd start -d /dev/ttyHS1 fi fiIf your config is like this and it still doesn't work, maybe @Eric-Katzfey can help you better.
@Andre-Moura Thank You! We fixed our GPS setting problem.
-
@daniel what ended up being your fix? I was seeing the same issues yesterday with our Sentinel trying to do GPS only outdoor flights. It wouldn't ARM due to the GPS Speed Accuracy. Flashing blue for a minute or two and then turning green after what i assumed was VIO getting healthy.
@Eric-Katzfey I don't want to use the Sentinel VIO so was hoping there was a GPS Only No VIO params file. It seems like the one posted on the git is still looking at VIO.
-
you will likely want to configure px4 params to suit your exact use case, e.g. some people will want it to arm without a gps lock, some won't. As a starting point we have "helper" files that can be loaded through QGC that set up the handful of relevant PX4 params for indoor vs outdoor flight
Here is the outdoor helper for px4 1.12:
https://gitlab.com/voxl-public/voxl-sdk/utilities/voxl-px4-params/-/blob/master/params/v1.12/ekf2_outdoor_gps_mag.paramsAnd the helpers for PX4 1.14:
https://gitlab.com/voxl-public/voxl-sdk/utilities/voxl-px4-params/-/tree/master/params/v1.14/EKF2_helpers -
you will likely want to configure px4 params to suit your exact use case, e.g. some people will want it to arm without a gps lock, some won't. As a starting point we have "helper" files that can be loaded through QGC that set up the handful of relevant PX4 params for indoor vs outdoor flight
Here is the outdoor helper for px4 1.12:
https://gitlab.com/voxl-public/voxl-sdk/utilities/voxl-px4-params/-/blob/master/params/v1.12/ekf2_outdoor_gps_mag.paramsAnd the helpers for PX4 1.14:
https://gitlab.com/voxl-public/voxl-sdk/utilities/voxl-px4-params/-/tree/master/params/v1.14/EKF2_helpers@James-Strawson Awesome, thanks I am going to load the outdoor params. Just didn't know if someone had already blessed us all with a known good config.
-
you will likely want to configure px4 params to suit your exact use case, e.g. some people will want it to arm without a gps lock, some won't. As a starting point we have "helper" files that can be loaded through QGC that set up the handful of relevant PX4 params for indoor vs outdoor flight
Here is the outdoor helper for px4 1.12:
https://gitlab.com/voxl-public/voxl-sdk/utilities/voxl-px4-params/-/blob/master/params/v1.12/ekf2_outdoor_gps_mag.paramsAnd the helpers for PX4 1.14:
https://gitlab.com/voxl-public/voxl-sdk/utilities/voxl-px4-params/-/tree/master/params/v1.14/EKF2_helpers@James-Strawson If i stop and disable the VIO server will that still allow GPS to pass through? I am getting good satellite and HDOP but the GPS never transitions from flashing blue to green with the ekf2_outdoor_gps_baro params. it is causing the platform to not allow me to put it in POSCTL. I do not intend to do GPS denied flights at this time and am trying to focus on outdoor 5G flights for a while to build confidence in our GCS software interactions with VOXL.
-
@James-Strawson If i stop and disable the VIO server will that still allow GPS to pass through? I am getting good satellite and HDOP but the GPS never transitions from flashing blue to green with the ekf2_outdoor_gps_baro params. it is causing the platform to not allow me to put it in POSCTL. I do not intend to do GPS denied flights at this time and am trying to focus on outdoor 5G flights for a while to build confidence in our GCS software interactions with VOXL.
@JustinDev23 These parameter settings won't affect the ability of the GPS receiver to get a lock. It is an independent unit and not affected by VIO in any way.
-
@JustinDev23 These parameter settings won't affect the ability of the GPS receiver to get a lock. It is an independent unit and not affected by VIO in any way.
@Eric-Katzfey, thanks for the response and clarifying.
I had a 3D Fix but wasnt able to switch from Manual to Position. I have worked on other projects with Ardupilot mission planner and it could blend or use best from different sources. I wasnt sure exactly how your implementation of GPS and VIO were working together on feeding positional data to the PX4 autopilot.
-
@Eric-Katzfey, thanks for the response and clarifying.
I had a 3D Fix but wasnt able to switch from Manual to Position. I have worked on other projects with Ardupilot mission planner and it could blend or use best from different sources. I wasnt sure exactly how your implementation of GPS and VIO were working together on feeding positional data to the PX4 autopilot.
@JustinDev23 You can have GPS fix and not have GPS lock on the PX4. Have you checked the number of satellites on QGC? From my experience, GPS lock (required to switch to Position mode) is achieved with 12 satellites or more.
Maybe test the drone on a new location with more open space, that did the trick for me. -
@JustinDev23 You can have GPS fix and not have GPS lock on the PX4. Have you checked the number of satellites on QGC? From my experience, GPS lock (required to switch to Position mode) is achieved with 12 satellites or more.
Maybe test the drone on a new location with more open space, that did the trick for me.@Andre-Moura sat and hdop have not been an issue on QGC. ekf2_req_nsats is set to 6 and i have had no obstructions and in open space.
GPS Horizontal Pos Error too high with 9 sats and 1.4 hdop
-
@Andre-Moura sat and hdop have not been an issue on QGC. ekf2_req_nsats is set to 6 and i have had no obstructions and in open space.
GPS Horizontal Pos Error too high with 9 sats and 1.4 hdop
And if it is not that it is GPS Speed Accuracy too low
I would hate to disable those checks but i feel like it is something else that is causing this to occur.
@Eric-Katzfey Is there a flow chart for what all is feeding position information to PX4 from VOXL2?
-
@JustinDev23 This is the closest to what you're looking for: https://docs.modalai.com/voxl-px4-developer-guide/
-
@JustinDev23 This is the closest to what you're looking for: https://docs.modalai.com/voxl-px4-developer-guide/
@tom Thanks! Looks like what i needed.
-
@andremoura The GPS unit will come up and get a fix on it's own after it has been powered on so that doesn't indicate anything about the health of the connection to the flight controller. If the result of
px4-listener sensor_gpsis never published then there is likely a problem with your connection to the GPS unit. The GPS driver on VOXL2 runs on the DSP, not on the applications processor so you have to useqshellto interact with it. So, for status, you would usepx4-qshell gps status. Have you made any changes to the Sentinel hardware or is it exactly the same as it was shipped?@Eric-Katzfey I have the same issue. I tried the method that you mentioned, not only voxl-px4 is not working now, but also I got this error:
Sending initialization request
Got topic data before configuration complete
Got topic data before configuration complete
Got topic data before configuration complete
Got topic data before configuration complete
Got topic data before configuration complete
Got topic data before configuration complete
Got topic data before configuration complete
Got topic data before configuration complete
Got topic data before configuration complete
Got topic data before configuration complete
Got topic data before configuration complete
Got topic data before configuration complete
Got topic data before configuration complete
INFO [muorb] SLPI: muorb aggregator thread running
INFO [muorb] muorb protobuf initalize method succeeded
INFO [muorb] succesfully did ADVERTISE_TEST_TYPE
INFO [muorb] SLPI: Creating pthread test_MUORBINFO [muorb] SLPI: Successfully created px4 task PX4_test_MUORB with tid 2097656
INFO [muorb] succesfully did SUBSCRIBE_TEST_TYPE
INFO [muorb] SLPI: Creating pthread test_MUORBINFO [muorb] SLPI: Successfully created px4 task PX4_test_MUORB with tid 2097655
INFO [muorb] succesfully did TOPIC_TEST_TYPE
INFO [muorb] SLPI: Creating pthread test_MUORBINFO [muorb] SLPI: Successfully created px4 task PX4_test_MUORB with tid 2097654
INFO [muorb] succesfully did UNSUBSCRIBE_TEST_TYPE
INFO [muorb] SLPI: Creating pthread test_MUORBINFO [muorb] SLPI: Successfully created px4 task PX4_test_MUORB with tid 2097653
INFO [muorb] muorb test passed
INFO [muorb] SLPI: Advertising remote topic log_message
| ___ \ \ \ / / / |
| |/ / \ V / / /| |
| __/ / \ / /| |
| | / /^\ \ ___ |
_| / / |_/px4 starting.
INFO [px4] startup script: /bin/sh /usr/bin/voxl-px4-start 0
INFO [parameters] Starting param sync THREAD
GPS: HOLYBRO
RC: SPEKTRUM
OSD: DISABLE
EXTRA STEPS:
INFO [muorb] SLPI: Starting param sync THREAD
Running on M0054
INFO [muorb] SLPI: before starting the qshell_entry task
INFO [muorb] SLPI: Creating pthread qshellINFO [muorb] SLPI: Successfully created px4 task PX4_qshell with tid 2097652
INFO [muorb] SLPI: qshell entry.....
INFO [muorb] SLPI: after starting the qshell_entry task
INFO [muorb] SLPI: Init app map initialized
INFO [param] selected parameter default file /data/px4/param/parameters
INFO [muorb] SLPI: Marking DeviceNode(parameter_client_reset_request) as advertised in process_remote_topic
INFO [uORB] Marking DeviceNode(parameter_client_reset_response) as advertised in process_remote_topic
INFO [muorb] SLPI: Advertising remote topic parameter_update
INFO [muorb] SLPI: Marking DeviceNode(parameter_client_set_value_request) as advertised in process_remote_to
INFO [uORB] Marking DeviceNode(parameter_server_set_used_request) as advertised in process_remote_topic
INFO [muorb] SLPI: Marking DeviceNode(parameter_server_set_used_response) as advertised in process_remote_to
INFO [uORB] Marking DeviceNode(parameter_client_set_value_response) as advertised in process_remote_topic
INFO [parameters] BSON document size 3022 bytes, decoded 3022 bytes (INT32:43, FLOAT:98)
INFO [logger] logger started (mode=all)
Starting IMU driver with no rotation
INFO [qshell] Send cmd: 'icm42688p start -s'
INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] SLPI: qshell gotten: icm42688p start -s
INFO [muorb] SLPI: arg0 = 'icm42688p'INFO [muorb] SLPI: arg1 = 'start'
INFO [muorb] SLPI: arg2 = '-s'
INFO [muorb] SLPI: *** SPI Device ID 0x26000a 2490378
INFO [uORB] Advertising remote topic sensor_accel
INFO [uORB] Advertising remote topic sensor_gyro
INFO [muorb] SLPI: ICM42688P::probe successful!
INFO [muorb] SLPI: on SPI bus 1
INFO [muorb] SLPI: >>> ICM42688P this: 3176e460
INFO [muorb] SLPI: icm42688p #0 on SPI bus 1
INFO [muorb] SLPI:INFO [muorb] SLPI: Ok executing command: icm42688p start -s
INFO [uORB] Advertising remote topic qshell_retval
INFO [muorb] SLPI: >>> ICM42688P this: 3176e460
INFO [qshell] qshell return value timestamp: 63895427, local time: 63898740
INFO [muorb] SLPI: >>> ICM42688P this: 3176e460
INFO [muorb] SLPI: Register interrupt b21d3164 e620e69c 3176e460
INFO [uORB] Advertising remote topic sensor_gyro_fifo
INFO [uORB] Advertising remote topic sensor_accel_fifo
INFO [uORB] Advertising remote topic imu_server
INFO [muorb] SLPI: >>> ICM42688P this: 3176e460
INFO [qshell] Send cmd: 'icp101xx start -I -b 5'
INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] SLPI: qshell gotten: icp101xx start -I -b 5
INFO [muorb] SLPI: arg0 = 'icp101xx'INFO [muorb] SLPI: arg1 = 'start'
INFO [muorb] SLPI: arg2 = '-I'
INFO [muorb] SLPI: arg3 = '-b'
INFO [muorb] SLPI: arg4 = '5'
INFO [muorb] SLPI: *** I2C Device ID 0xb76329 12018473
INFO [muorb] SLPI: icp101xx #0 on I2C bus 5
INFO [muorb] SLPI: address 0x63
INFO [muorb] SLPI:INFO [muorb] SLPI: Ok executing command: icp101xx start -I -b 5
INFO [qshell] qshell return value timestamp: 64943196, local time: 64943952
Starting Holybro magnetometer
INFO [qshell] Send cmd: 'ist8310 start -R 10 -X -b 1'
INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] SLPI: qshell gotten: ist8310 start -R 10 -X -b 1
INFO [muorb] SLPI: arg0 = 'ist8310'INFO [muorb] SLPI: arg1 = 'start'
INFO [muorb] SLPI: arg2 = '-R'
INFO [muorb] SLPI: arg3 = '10'
INFO [muorb] SLPI: arg4 = '-X'
INFO [muorb] SLPI: arg5 = '-b'
INFO [muorb] SLPI: arg6 = '1'
INFO [muorb] SLPI: *** I2C Device ID 0x60e09 396809
INFO [muorb] SLPI: ist8310 #0 on I2C bus 1
INFO [muorb] SLPI: (external)
INFO [muorb] SLPI: address 0xE
INFO [muorb] SLPI: rotation 10
INFO [muorb] SLPI:INFO [muorb] SLPI: Ok executing command: ist8310 start -R 10 -X -b 1
INFO [qshell] qshell return value timestamp: 64990484, local time: 64992712
INFO [qshell] Send cmd: 'gps start'
INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] SLPI: qshell gotten: gps start
INFO [muorb] SLPI: arg0 = 'gps'INFO [muorb] SLPI: arg1 = 'start'
INFO [muorb] SLPI: Creating pthread gps
INFO [muorb] SLPI: Successfully created px4 task PX4_gps with tid 2097648
INFO [muorb] SLPI: Ok executing command: gps start
INFO [qshell] qshell return value timestamp: 65023088, local time: 65025096
Starting Holybro LED driver
INFO [qshell] Send cmd: 'rgbled_ncp5623c start -X -b 1 -f 400 -a 56'
INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] SLPI: qshell gotten: rgbled_ncp5623c start -X -b 1 -f 400 -a 56
INFO [muorb] SLPI: arg0 = 'rgbled_ncp5623c'INFO [muorb] SLPI: arg1 = 'start'
INFO [muorb] SLPI: arg2 = '-X'
INFO [muorb] SLPI: arg3 = '-b'
INFO [muorb] SLPI: arg4 = '1'
INFO [muorb] SLPI: arg5 = '-f'
INFO [muorb] SLPI: arg6 = '400'
INFO [muorb] SLPI: arg7 = '-a'
INFO [muorb] SLPI: arg8 = '56'
INFO [muorb] SLPI: *** I2C Device ID 0x7b3809 8075273
INFO [muorb] SLPI: rgbled_ncp5623c #0 on I2C bus 1
INFO [muorb] SLPI: (external)
INFO [muorb] SLPI: address 0x38
INFO [muorb] SLPI:INFO [muorb] SLPI: Ok executing command: rgbled_ncp5623c start -X -b 1 -f 400 -a 56
INFO [qshell] qshell return value timestamp: 65062554, local time: 65063907
INFO [uORB] Advertising remote topic sensor_mag
INFO [qshell] Send cmd: 'modal_io start'
INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] SLPI: qshell gotten: modal_io start
INFO [muorb] SLPI: arg0 = 'modal_io'INFO [muorb] SLPI: arg1 = 'start'
INFO [uORB] Advertising remote topic actuator_outputs
INFO [uORB] Advertising remote topic sensor_baro
INFO [muorb] SLPI: Ok executing command: modal_io start
INFO [muorb] SLPI: Opened UART ESC device
INFO [qshell] qshell return value timestamp: 65169377, local time: 65171079
INFO [uORB] Advertising remote topic actuator_outputs_debug
INFO [uORB] Advertising remote topic esc_status
Starting Spektrum RC
INFO [qshell] Send cmd: 'spektrum_rc start'
INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] SLPI: qshell gotten: spektrum_rc start
INFO [muorb] SLPI: arg0 = 'spektrum_rc'INFO [muorb] SLPI: arg1 = 'start'
INFO [muorb] SLPI: Creating pthread spektrum_rc_main
INFO [muorb] SLPI: Successfully created px4 task PX4_spektrum_rc_main with tid 2097645
INFO [muorb] SLPI: Ok executing command: spektrum_rc start
INFO [qshell] qshell return value timestamp: 66215910, local time: 66216633
INFO [qshell] Send cmd: 'voxlpm start -X -b 2'
INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] SLPI: qshell gotten: voxlpm start -X -b 2
INFO [muorb] SLPI: arg0 = 'voxlpm'INFO [muorb] SLPI: arg1 = 'start'
INFO [muorb] SLPI: arg2 = '-X'
INFO [muorb] SLPI: arg3 = '-b'
INFO [muorb] SLPI: arg4 = '2'
INFO [muorb] SLPI: *** I2C Device ID 0xd24411 13779985
INFO [muorb] SLPI: Set i2c address 0x6a, fd 3
INFO [muorb] SLPI: Set i2c address 0x44, fd 3
INFO [uORB] Advertising remote topic battery_status
INFO [muorb] SLPI: voxlpm #0 on I2C bus 2
INFO [muorb] SLPI: (external)
INFO [muorb] SLPI: address 0x44
INFO [muorb] SLPI:INFO [muorb] SLPI: Ok executing command: voxlpm start -X -b 2
INFO [uORB] Advertising remote topic power_monitor
INFO [qshell] qshell return value timestamp: 67272854, local time: 67275718
INFO [qshell] Send cmd: 'sensors start'
INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] SLPI: qshell gotten: sensors start
INFO [muorb] SLPI: arg0 = 'sensors'INFO [muorb] SLPI: arg1 = 'start'
INFO [uORB] Advertising remote topic sensor_selection
INFO [uORB] Advertising remote topic sensors_status_imu
INFO [uORB] Advertising remote topic vehicle_acceleration
INFO [uORB] Advertising remote topic vehicle_angular_velocity
INFO [uORB] Advertising remote topic sensor_combined
INFO [uORB] Advertising remote topic vehicle_air_data
INFO [uORB] Advertising remote topic vehicle_gps_position
INFO [uORB] Advertising remote topic vehicle_magnetometer
INFO [uORB] Advertising remote topic sensor_preflight_mag
INFO [uORB] Advertising remote topic vehicle_imu
INFO [uORB] Advertising remote topic vehicle_imu_status
INFO [muorb] SLPI: Ok executing command: sensors start
INFO [uORB] Advertising remote topic sensors_status_mag
INFO [qshell] qshell return value timestamp: 67434965, local time: 67437421
INFO [uORB] Advertising remote topic sensors_status_baro
INFO [qshell] Send cmd: 'ekf2 start'
INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] SLPI: qshell gotten: ekf2 start
INFO [muorb] SLPI: arg0 = 'ekf2'INFO [muorb] SLPI: arg1 = 'start'
INFO [uORB] Advertising remote topic vehicle_attitude
INFO [uORB] Advertising remote topic vehicle_local_position
INFO [uORB] Advertising remote topic estimator_event_flags
INFO [uORB] Advertising remote topic estimator_innovation_test_ratios
INFO [uORB] Advertising remote topic estimator_innovation_variances
INFO [uORB] Advertising remote topic estimator_innovations
INFO [uORB] Advertising remote topic estimator_sensor_bias
INFO [uORB] Advertising remote topic estimator_states
INFO [uORB] Advertising remote topic estimator_status_flags
INFO [uORB] Advertising remote topic estimator_status
INFO [muorb] SLPI: Ok executing command: ekf2 start
INFO [qshell] qshell return value timestamp: 67750482, local time: 67753672
INFO [uORB] Advertising remote topic ekf2_timestamps
INFO [uORB] Advertising remote topic vehicle_odometry
INFO [uORB] Advertising remote topic estimator_aid_src_baro_hgt
INFO [uORB] Advertising remote topic estimator_aid_src_fake_pos
INFO [uORB] Advertising remote topic estimator_aid_src_fake_hgt
INFO [uORB] Advertising remote topic estimator_aid_src_mag_heading
INFO [uORB] Advertising remote topic estimator_aid_src_mag
INFO [uORB] Advertising remote topic estimator_aid_src_gravity
INFO [qshell] Send cmd: 'mc_pos_control start'
INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] SLPI: qshell gotten: mc_pos_control start
INFO [muorb] SLPI: arg0 = 'mc_pos_control'INFO [muorb] SLPI: arg1 = 'start'
INFO [uORB] Advertising remote topic takeoff_status
INFO [muorb] SLPI: Ok executing command: mc_pos_control start
INFO [qshell] qshell return value timestamp: 67859638, local time: 67861554
INFO [qshell] Send cmd: 'mc_att_control start'
INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] SLPI: qshell gotten: mc_att_control start
INFO [muorb] SLPI: arg0 = 'mc_att_control'INFO [muorb] SLPI: arg1 = 'start'
INFO [muorb] SLPI: Ok executing command: mc_att_control start
INFO [qshell] qshell return value timestamp: 67918747, local time: 67920290
INFO [qshell] Send cmd: 'mc_rate_control start'
INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] SLPI: qshell gotten: mc_rate_control start
INFO [muorb] SLPI: arg0 = 'mc_rate_control'INFO [muorb] SLPI: arg1 = 'start'
INFO [uORB] Advertising remote topic rate_ctrl_status
INFO [muorb] SLPI: Ok executing command: mc_rate_control start
INFO [qshell] qshell return value timestamp: 68027813, local time: 68030404
INFO [qshell] Send cmd: 'mc_hover_thrust_estimator start'
INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] SLPI: qshell gotten: mc_hover_thrust_estimator start
INFO [muorb] SLPI: arg0 = 'mc_hover_thrust_estimator'INFO [muorb] SLPI: arg1 = 'start'
INFO [muorb] SLPI: Ok executing command: mc_hover_thrust_estimator start
INFO [qshell] qshell return value timestamp: 68087592, local time: 68089224
INFO [qshell] Send cmd: 'mc_autotune_attitude_control start'
INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] SLPI: qshell gotten: mc_autotune_attitude_control start
INFO [muorb] SLPI: arg0 = 'mc_autotune_attitude_control'INFO [muorb] SLPI: arg1 = 'start'
INFO [uORB] Advertising remote topic autotune_attitude_control_status
INFO [muorb] SLPI: Ok executing command: mc_autotune_attitude_control start
INFO [qshell] qshell return value timestamp: 68137157, local time: 68138847
INFO [qshell] Send cmd: 'land_detector start multicopter'
INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] SLPI: qshell gotten: land_detector start multicopter
INFO [muorb] SLPI: arg0 = 'land_detector'INFO [muorb] SLPI: arg1 = 'start'
INFO [muorb] SLPI: arg2 = 'multicopter'
INFO [muorb] SLPI: Ok executing command: land_detector start multicopter
INFO [qshell] qshell return value timestamp: 68188877, local time: 68189722
INFO [uORB] Advertising remote topic vehicle_land_detected
INFO [qshell] Send cmd: 'manual_control start'
INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] SLPI: qshell gotten: manual_control start
INFO [muorb] SLPI: arg0 = 'manual_control'INFO [muorb] SLPI: arg1 = 'start'
INFO [muorb] SLPI: Ok executing command: manual_control start
INFO [uORB] Advertising remote topic manual_control_setpoint
INFO [qshell] qshell return value timestamp: 68237903, local time: 68239705
INFO [qshell] Send cmd: 'control_allocator start'
INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] SLPI: qshell gotten: control_allocator start
INFO [muorb] SLPI: arg0 = 'control_allocator'INFO [muorb] SLPI: arg1 = 'start'
INFO [uORB] Advertising remote topic control_allocator_status
INFO [uORB] Marking DeviceNode(control_allocator_status) as advertised in process_remote_topic
INFO [uORB] Advertising remote topic actuator_motors
INFO [uORB] Advertising remote topic actuator_servos
INFO [uORB] Advertising remote topic actuator_servos_trim
INFO [muorb] SLPI: Ok executing command: control_allocator start
INFO [qshell] qshell return value timestamp: 68577984, local time: 68579385
INFO [qshell] Send cmd: 'rc_update start'
INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] SLPI: qshell gotten: rc_update start
INFO [muorb] SLPI: arg0 = 'rc_update'INFO [muorb] SLPI: arg1 = 'start'
INFO [muorb] SLPI: Ok executing command: rc_update start
INFO [qshell] qshell return value timestamp: 68873945, local time: 68874998
INFO [qshell] Send cmd: 'commander start'
INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] SLPI: qshell gotten: commander start
INFO [muorb] SLPI: arg0 = 'commander'INFO [muorb] SLPI: arg1 = 'start'
INFO [muorb] SLPI: Creating pthread commander
INFO [muorb] SLPI: Successfully created px4 task PX4_commander with tid 2097641
INFO [uORB] Advertising remote topic led_control
INFO [muorb] SLPI: LED: open /dev/led0 failed (22)
INFO [muorb] SLPI: Ok executing command: commander start
INFO [uORB] Advertising remote topic tune_control
INFO [qshell] qshell return value timestamp: 69104924, local time: 69107190
INFO [uORB] Advertising remote topic event
INFO [uORB] Advertising remote topic health_report
INFO [uORB] Advertising remote topic failsafe_flags
INFO [uORB] Advertising remote topic actuator_armed
INFO [uORB] Advertising remote topic vehicle_control_mode
INFO [uORB] Advertising remote topic vehicle_thrust_setpoint
INFO [uORB] Advertising remote topic vehicle_torque_setpoint
INFO [uORB] Advertising remote topic vehicle_rates_setpoint
INFO [uORB] Advertising remote topic vehicle_status
INFO [uORB] Advertising remote topic failure_detector_status
INFO [uORB] Advertising remote topic vehicle_local_position_setpoint
INFO [uORB] Advertising remote topic vehicle_attitude_setpoint
INFO [qshell] Send cmd: 'commander mode manual'
INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] SLPI: qshell gotten: commander mode manual
INFO [muorb] SLPI: arg0 = 'commander'INFO [muorb] SLPI: arg1 = 'mode'
INFO [muorb] SLPI: arg2 = 'manual'
INFO [uORB] Advertising remote topic vehicle_command
INFO [muorb] SLPI: Ok executing command: commander mode manual
INFO [qshell] qshell return value timestamp: 69148498, local time: 69150136
INFO [uORB] Advertising remote topic vehicle_command_ack
INFO [uORB] Marking DeviceNode(vehicle_attitude_setpoint) as advertised in process_remote_topic
INFO [qshell] Send cmd: 'param_set_selector start'
INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] SLPI: qshell gotten: param_set_selector start
INFO [muorb] SLPI: arg0 = 'param_set_selector'INFO [muorb] SLPI: arg1 = 'start'
INFO [muorb] SLPI: Ok executing command: param_set_selector start
INFO [qshell] qshell return value timestamp: 69186104, local time: 69187696
INFO [qshell] Send cmd: 'flight_mode_manager start'
INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] SLPI: qshell gotten: flight_mode_manager start
INFO [muorb] SLPI: arg0 = 'flight_mode_manager'INFO [muorb] SLPI: arg1 = 'start'
INFO [uORB] Marking DeviceNode(vehicle_command) as advertised in process_remote_topic
INFO [muorb] SLPI: Ok executing command: flight_mode_manager start
INFO [qshell] qshell return value timestamp: 69346243, local time: 69347753
INFO [uORB] Advertising remote topic actuator_controls_status_0
INFO [dataman] data manager file '/data/px4/dataman' size is 7866640 bytes
INFO [muorb] SLPI: Advertising remote topic transponder_report
INFO [muorb] SLPI: Advertising remote topic rtl_time_estimate
INFO [muorb] SLPI: Advertising remote topic position_setpoint_triplet
INFO [mavlink] mode: Onboard, data rate: 100000 B/s on udp port 14556 remote port 14557
INFO [muorb] SLPI: Advertising remote topic telemetry_status
INFO [mavlink] partner IP: 127.0.0.1
INFO [muorb] SLPI: Advertising remote topic vehicle_visual_odometry
INFO [muorb] SLPI: Advertising remote topic obstacle_distance
INFO [muorb] SLPI: Advertising remote topic offboard_control_mode
INFO [muorb] SLPI: Advertising remote topic timesync_status
INFO [uORB] Advertising remote topic estimator_aid_src_ev_hgt
INFO [uORB] Advertising remote topic estimator_aid_src_ev_pos
INFO [uORB] Advertising remote topic estimator_aid_src_ev_vel
INFO [uORB] Advertising remote topic estimator_aid_src_ev_yaw
INFO [mavlink] mode: Normal, data rate: 100000 B/s on udp port 14558 remote port 14559
INFO [muorb] SLPI: Marking DeviceNode(telemetry_status) as advertised in process_remote_topic
INFO [mavlink] partner IP: 127.0.0.1
INFO [mavlink] MAVLink only on localhost (set param MAV_{i}_BROADCAST = 1 to enable network)
INFO [px4] Startup script returned successfully
INFO [muorb] SLPI: u-blox firmware version: SPG 3.01
INFO [muorb] SLPI: u-blox protocol version: 18.00
INFO [muorb] SLPI: u-blox module: NEO-M8N-0
INFO [uORB] Advertising remote topic sensor_gps
INFO [muorb] SLPI: Advertising remote topic ping
INFO [uORB] Advertising remote topic mavlink_log
INFO [muorb] SLPI: Connection to ground station lost
INFO [muorb] SLPI: GCS connection regained
INFO [muorb] SLPI: Connection to ground station lost
INFO [muorb] SLPI: GCS connection regained
INFO [muorb] SLPI: Connection to ground station lost
INFO [muorb] SLPI: GCS connection regained
INFO [muorb] SLPI: Connection to ground station lost
INFO [muorb] SLPI: GCS connection regained
INFO [muorb] SLPI: Connection to ground station lost
INFO [muorb] SLPI: GCS connection regained
INFO [muorb] SLPI: Connection to ground station lost
INFO [muorb] SLPI: GCS connection regained
INFO [muorb] SLPI: Connection to ground station lost
INFO [muorb] SLPI: GCS connection regained
INFO [muorb] SLPI: Connection to ground station lost
INFO [muorb] SLPI: GCS connection regained
INFO [muorb] SLPI: Connection to ground station lost
INFO [muorb] SLPI: GCS connection regained
INFO [muorb] SLPI: Connection to ground station lost
INFO [muorb] SLPI: GCS connection regained
INFO [muorb] SLPI: Connection to ground station lost
INFO [muorb] SLPI: GCS connection regained
INFO [muorb] SLPI: Connection to ground station lost
INFO [muorb] SLPI: GCS connection regained
WARN [uORB] orb_advertise_multi: failed to set queue size -
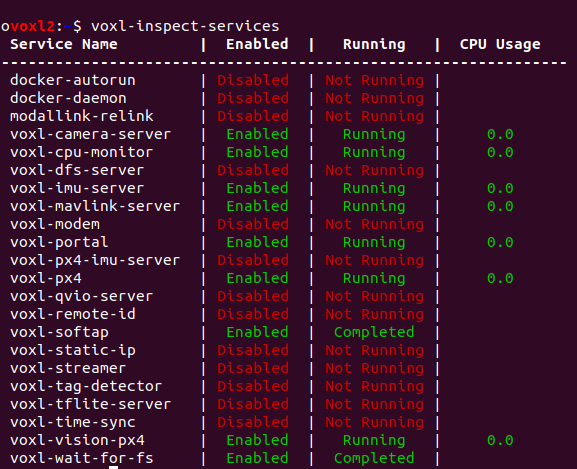
@andremoura Okay, that's not very useful. Let's try something else. First of all can you post the contents of the file
/etc/systemd/system/voxl-px4.service? Then, stop the service from autostarting voxl-px4 with the commandssystemctl disable voxl-px4andsync. Then reboot the drone. When you adb back in to the drone you can runvoxl-inspect-servicesto verify that voxl-px4 isn't running. Then you can start voxl-px4 manually from the command line withvoxl-px4and then post all of the output from that.@Eric-Katzfey
I tried this method, but it still is not working! Here is the console:Sending initialization request Got topic data before configuration complete Got topic data before configuration complete Got topic data before configuration complete Got topic data before configuration complete Got topic data before configuration complete Got topic data before configuration complete Got topic data before configuration complete Got topic data before configuration complete Got topic data before configuration complete Got topic data before configuration complete Got topic data before configuration complete Got topic data before configuration complete Got topic data before configuration complete INFO [muorb] SLPI: muorb aggregator thread running INFO [muorb] muorb protobuf initalize method succeeded INFO [muorb] succesfully did ADVERTISE_TEST_TYPE INFO [muorb] SLPI: Creating pthread test_MUORB INFO [muorb] SLPI: Successfully created px4 task PX4_test_MUORB with tid 2097656 INFO [muorb] succesfully did SUBSCRIBE_TEST_TYPE INFO [muorb] SLPI: Creating pthread test_MUORB INFO [muorb] SLPI: Successfully created px4 task PX4_test_MUORB with tid 2097655 INFO [muorb] succesfully did TOPIC_TEST_TYPE INFO [muorb] SLPI: Creating pthread test_MUORB INFO [muorb] SLPI: Successfully created px4 task PX4_test_MUORB with tid 2097654 INFO [muorb] succesfully did UNSUBSCRIBE_TEST_TYPE INFO [muorb] SLPI: Creating pthread test_MUORB INFO [muorb] SLPI: Successfully created px4 task PX4_test_MUORB with tid 2097653 INFO [muorb] muorb test passed INFO [muorb] SLPI: Advertising remote topic log_message ______ __ __ ___ | ___ \ \ \ / / / | | |_/ / \ V / / /| | | __/ / \ / /_| | | | / /^\ \ \___ | \_| \/ \/ |_/ px4 starting. INFO [px4] startup script: /bin/sh /usr/bin/voxl-px4-start 0 INFO [parameters] Starting param sync THREAD ************************* GPS: HOLYBRO RC: SPEKTRUM OSD: DISABLE EXTRA STEPS: ************************* INFO [muorb] SLPI: Starting param sync THREAD Running on M0054 INFO [muorb] SLPI: before starting the qshell_entry task INFO [muorb] SLPI: Creating pthread qshell INFO [muorb] SLPI: Successfully created px4 task PX4_qshell with tid 2097652 INFO [muorb] SLPI: qshell entry..... INFO [muorb] SLPI: after starting the qshell_entry task INFO [muorb] SLPI: Init app map initialized INFO [param] selected parameter default file /data/px4/param/parameters INFO [muorb] SLPI: Marking DeviceNode(parameter_client_reset_request) as advertised in process_remote_topic INFO [uORB] Marking DeviceNode(parameter_client_reset_response) as advertised in process_remote_topic INFO [muorb] SLPI: Advertising remote topic parameter_update INFO [muorb] SLPI: Marking DeviceNode(parameter_client_set_value_request) as advertised in process_remote_to INFO [uORB] Marking DeviceNode(parameter_server_set_used_request) as advertised in process_remote_topic INFO [muorb] SLPI: Marking DeviceNode(parameter_server_set_used_response) as advertised in process_remote_to INFO [uORB] Marking DeviceNode(parameter_client_set_value_response) as advertised in process_remote_topic INFO [parameters] BSON document size 3022 bytes, decoded 3022 bytes (INT32:43, FLOAT:98) INFO [logger] logger started (mode=all) Starting IMU driver with no rotation INFO [qshell] Send cmd: 'icm42688p start -s' INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic INFO [muorb] SLPI: qshell gotten: icm42688p start -s INFO [muorb] SLPI: arg0 = 'icm42688p' INFO [muorb] SLPI: arg1 = 'start' INFO [muorb] SLPI: arg2 = '-s' INFO [muorb] SLPI: *** SPI Device ID 0x26000a 2490378 INFO [uORB] Advertising remote topic sensor_accel INFO [uORB] Advertising remote topic sensor_gyro INFO [muorb] SLPI: ICM42688P::probe successful! INFO [muorb] SLPI: on SPI bus 1 INFO [muorb] SLPI: >>> ICM42688P this: 3176e460 INFO [muorb] SLPI: icm42688p #0 on SPI bus 1 INFO [muorb] SLPI: INFO [muorb] SLPI: Ok executing command: icm42688p start -s INFO [uORB] Advertising remote topic qshell_retval INFO [muorb] SLPI: >>> ICM42688P this: 3176e460 INFO [qshell] qshell return value timestamp: 63895427, local time: 63898740 INFO [muorb] SLPI: >>> ICM42688P this: 3176e460 INFO [muorb] SLPI: Register interrupt b21d3164 e620e69c 3176e460 INFO [uORB] Advertising remote topic sensor_gyro_fifo INFO [uORB] Advertising remote topic sensor_accel_fifo INFO [uORB] Advertising remote topic imu_server INFO [muorb] SLPI: >>> ICM42688P this: 3176e460 INFO [qshell] Send cmd: 'icp101xx start -I -b 5' INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic INFO [muorb] SLPI: qshell gotten: icp101xx start -I -b 5 INFO [muorb] SLPI: arg0 = 'icp101xx' INFO [muorb] SLPI: arg1 = 'start' INFO [muorb] SLPI: arg2 = '-I' INFO [muorb] SLPI: arg3 = '-b' INFO [muorb] SLPI: arg4 = '5' INFO [muorb] SLPI: *** I2C Device ID 0xb76329 12018473 INFO [muorb] SLPI: icp101xx #0 on I2C bus 5 INFO [muorb] SLPI: address 0x63 INFO [muorb] SLPI: INFO [muorb] SLPI: Ok executing command: icp101xx start -I -b 5 INFO [qshell] qshell return value timestamp: 64943196, local time: 64943952 Starting Holybro magnetometer INFO [qshell] Send cmd: 'ist8310 start -R 10 -X -b 1' INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic INFO [muorb] SLPI: qshell gotten: ist8310 start -R 10 -X -b 1 INFO [muorb] SLPI: arg0 = 'ist8310' INFO [muorb] SLPI: arg1 = 'start' INFO [muorb] SLPI: arg2 = '-R' INFO [muorb] SLPI: arg3 = '10' INFO [muorb] SLPI: arg4 = '-X' INFO [muorb] SLPI: arg5 = '-b' INFO [muorb] SLPI: arg6 = '1' INFO [muorb] SLPI: *** I2C Device ID 0x60e09 396809 INFO [muorb] SLPI: ist8310 #0 on I2C bus 1 INFO [muorb] SLPI: (external) INFO [muorb] SLPI: address 0xE INFO [muorb] SLPI: rotation 10 INFO [muorb] SLPI: INFO [muorb] SLPI: Ok executing command: ist8310 start -R 10 -X -b 1 INFO [qshell] qshell return value timestamp: 64990484, local time: 64992712 INFO [qshell] Send cmd: 'gps start' INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic INFO [muorb] SLPI: qshell gotten: gps start INFO [muorb] SLPI: arg0 = 'gps' INFO [muorb] SLPI: arg1 = 'start' INFO [muorb] SLPI: Creating pthread gps INFO [muorb] SLPI: Successfully created px4 task PX4_gps with tid 2097648 INFO [muorb] SLPI: Ok executing command: gps start INFO [qshell] qshell return value timestamp: 65023088, local time: 65025096 Starting Holybro LED driver INFO [qshell] Send cmd: 'rgbled_ncp5623c start -X -b 1 -f 400 -a 56' INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic INFO [muorb] SLPI: qshell gotten: rgbled_ncp5623c start -X -b 1 -f 400 -a 56 INFO [muorb] SLPI: arg0 = 'rgbled_ncp5623c' INFO [muorb] SLPI: arg1 = 'start' INFO [muorb] SLPI: arg2 = '-X' INFO [muorb] SLPI: arg3 = '-b' INFO [muorb] SLPI: arg4 = '1' INFO [muorb] SLPI: arg5 = '-f' INFO [muorb] SLPI: arg6 = '400' INFO [muorb] SLPI: arg7 = '-a' INFO [muorb] SLPI: arg8 = '56' INFO [muorb] SLPI: *** I2C Device ID 0x7b3809 8075273 INFO [muorb] SLPI: rgbled_ncp5623c #0 on I2C bus 1 INFO [muorb] SLPI: (external) INFO [muorb] SLPI: address 0x38 INFO [muorb] SLPI: INFO [muorb] SLPI: Ok executing command: rgbled_ncp5623c start -X -b 1 -f 400 -a 56 INFO [qshell] qshell return value timestamp: 65062554, local time: 65063907 INFO [uORB] Advertising remote topic sensor_mag INFO [qshell] Send cmd: 'modal_io start' INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic INFO [muorb] SLPI: qshell gotten: modal_io start INFO [muorb] SLPI: arg0 = 'modal_io' INFO [muorb] SLPI: arg1 = 'start' INFO [uORB] Advertising remote topic actuator_outputs INFO [uORB] Advertising remote topic sensor_baro INFO [muorb] SLPI: Ok executing command: modal_io start INFO [muorb] SLPI: Opened UART ESC device INFO [qshell] qshell return value timestamp: 65169377, local time: 65171079 INFO [uORB] Advertising remote topic actuator_outputs_debug INFO [uORB] Advertising remote topic esc_status Starting Spektrum RC INFO [qshell] Send cmd: 'spektrum_rc start' INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic INFO [muorb] SLPI: qshell gotten: spektrum_rc start INFO [muorb] SLPI: arg0 = 'spektrum_rc' INFO [muorb] SLPI: arg1 = 'start' INFO [muorb] SLPI: Creating pthread spektrum_rc_main INFO [muorb] SLPI: Successfully created px4 task PX4_spektrum_rc_main with tid 2097645 INFO [muorb] SLPI: Ok executing command: spektrum_rc start INFO [qshell] qshell return value timestamp: 66215910, local time: 66216633 INFO [qshell] Send cmd: 'voxlpm start -X -b 2' INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic INFO [muorb] SLPI: qshell gotten: voxlpm start -X -b 2 INFO [muorb] SLPI: arg0 = 'voxlpm' INFO [muorb] SLPI: arg1 = 'start' INFO [muorb] SLPI: arg2 = '-X' INFO [muorb] SLPI: arg3 = '-b' INFO [muorb] SLPI: arg4 = '2' INFO [muorb] SLPI: *** I2C Device ID 0xd24411 13779985 INFO [muorb] SLPI: Set i2c address 0x6a, fd 3 INFO [muorb] SLPI: Set i2c address 0x44, fd 3 INFO [uORB] Advertising remote topic battery_status INFO [muorb] SLPI: voxlpm #0 on I2C bus 2 INFO [muorb] SLPI: (external) INFO [muorb] SLPI: address 0x44 INFO [muorb] SLPI: INFO [muorb] SLPI: Ok executing command: voxlpm start -X -b 2 INFO [uORB] Advertising remote topic power_monitor INFO [qshell] qshell return value timestamp: 67272854, local time: 67275718 INFO [qshell] Send cmd: 'sensors start' INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic INFO [muorb] SLPI: qshell gotten: sensors start INFO [muorb] SLPI: arg0 = 'sensors' INFO [muorb] SLPI: arg1 = 'start' INFO [uORB] Advertising remote topic sensor_selection INFO [uORB] Advertising remote topic sensors_status_imu INFO [uORB] Advertising remote topic vehicle_acceleration INFO [uORB] Advertising remote topic vehicle_angular_velocity INFO [uORB] Advertising remote topic sensor_combined INFO [uORB] Advertising remote topic vehicle_air_data INFO [uORB] Advertising remote topic vehicle_gps_position INFO [uORB] Advertising remote topic vehicle_magnetometer INFO [uORB] Advertising remote topic sensor_preflight_mag INFO [uORB] Advertising remote topic vehicle_imu INFO [uORB] Advertising remote topic vehicle_imu_status INFO [muorb] SLPI: Ok executing command: sensors start INFO [uORB] Advertising remote topic sensors_status_mag INFO [qshell] qshell return value timestamp: 67434965, local time: 67437421 INFO [uORB] Advertising remote topic sensors_status_baro INFO [qshell] Send cmd: 'ekf2 start' INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic INFO [muorb] SLPI: qshell gotten: ekf2 start INFO [muorb] SLPI: arg0 = 'ekf2' INFO [muorb] SLPI: arg1 = 'start' INFO [uORB] Advertising remote topic vehicle_attitude INFO [uORB] Advertising remote topic vehicle_local_position INFO [uORB] Advertising remote topic estimator_event_flags INFO [uORB] Advertising remote topic estimator_innovation_test_ratios INFO [uORB] Advertising remote topic estimator_innovation_variances INFO [uORB] Advertising remote topic estimator_innovations INFO [uORB] Advertising remote topic estimator_sensor_bias INFO [uORB] Advertising remote topic estimator_states INFO [uORB] Advertising remote topic estimator_status_flags INFO [uORB] Advertising remote topic estimator_status INFO [muorb] SLPI: Ok executing command: ekf2 start INFO [qshell] qshell return value timestamp: 67750482, local time: 67753672 INFO [uORB] Advertising remote topic ekf2_timestamps INFO [uORB] Advertising remote topic vehicle_odometry INFO [uORB] Advertising remote topic estimator_aid_src_baro_hgt INFO [uORB] Advertising remote topic estimator_aid_src_fake_pos INFO [uORB] Advertising remote topic estimator_aid_src_fake_hgt INFO [uORB] Advertising remote topic estimator_aid_src_mag_heading INFO [uORB] Advertising remote topic estimator_aid_src_mag INFO [uORB] Advertising remote topic estimator_aid_src_gravity INFO [qshell] Send cmd: 'mc_pos_control start' INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic INFO [muorb] SLPI: qshell gotten: mc_pos_control start INFO [muorb] SLPI: arg0 = 'mc_pos_control' INFO [muorb] SLPI: arg1 = 'start' INFO [uORB] Advertising remote topic takeoff_status INFO [muorb] SLPI: Ok executing command: mc_pos_control start INFO [qshell] qshell return value timestamp: 67859638, local time: 67861554 INFO [qshell] Send cmd: 'mc_att_control start' INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic INFO [muorb] SLPI: qshell gotten: mc_att_control start INFO [muorb] SLPI: arg0 = 'mc_att_control' INFO [muorb] SLPI: arg1 = 'start' INFO [muorb] SLPI: Ok executing command: mc_att_control start INFO [qshell] qshell return value timestamp: 67918747, local time: 67920290 INFO [qshell] Send cmd: 'mc_rate_control start' INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic INFO [muorb] SLPI: qshell gotten: mc_rate_control start INFO [muorb] SLPI: arg0 = 'mc_rate_control' INFO [muorb] SLPI: arg1 = 'start' INFO [uORB] Advertising remote topic rate_ctrl_status INFO [muorb] SLPI: Ok executing command: mc_rate_control start INFO [qshell] qshell return value timestamp: 68027813, local time: 68030404 INFO [qshell] Send cmd: 'mc_hover_thrust_estimator start' INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic INFO [muorb] SLPI: qshell gotten: mc_hover_thrust_estimator start INFO [muorb] SLPI: arg0 = 'mc_hover_thrust_estimator' INFO [muorb] SLPI: arg1 = 'start' INFO [muorb] SLPI: Ok executing command: mc_hover_thrust_estimator start INFO [qshell] qshell return value timestamp: 68087592, local time: 68089224 INFO [qshell] Send cmd: 'mc_autotune_attitude_control start' INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic INFO [muorb] SLPI: qshell gotten: mc_autotune_attitude_control start INFO [muorb] SLPI: arg0 = 'mc_autotune_attitude_control' INFO [muorb] SLPI: arg1 = 'start' INFO [uORB] Advertising remote topic autotune_attitude_control_status INFO [muorb] SLPI: Ok executing command: mc_autotune_attitude_control start INFO [qshell] qshell return value timestamp: 68137157, local time: 68138847 INFO [qshell] Send cmd: 'land_detector start multicopter' INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic INFO [muorb] SLPI: qshell gotten: land_detector start multicopter INFO [muorb] SLPI: arg0 = 'land_detector' INFO [muorb] SLPI: arg1 = 'start' INFO [muorb] SLPI: arg2 = 'multicopter' INFO [muorb] SLPI: Ok executing command: land_detector start multicopter INFO [qshell] qshell return value timestamp: 68188877, local time: 68189722 INFO [uORB] Advertising remote topic vehicle_land_detected INFO [qshell] Send cmd: 'manual_control start' INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic INFO [muorb] SLPI: qshell gotten: manual_control start INFO [muorb] SLPI: arg0 = 'manual_control' INFO [muorb] SLPI: arg1 = 'start' INFO [muorb] SLPI: Ok executing command: manual_control start INFO [uORB] Advertising remote topic manual_control_setpoint INFO [qshell] qshell return value timestamp: 68237903, local time: 68239705 INFO [qshell] Send cmd: 'control_allocator start' INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic INFO [muorb] SLPI: qshell gotten: control_allocator start INFO [muorb] SLPI: arg0 = 'control_allocator' INFO [muorb] SLPI: arg1 = 'start' INFO [uORB] Advertising remote topic control_allocator_status INFO [uORB] Marking DeviceNode(control_allocator_status) as advertised in process_remote_topic INFO [uORB] Advertising remote topic actuator_motors INFO [uORB] Advertising remote topic actuator_servos INFO [uORB] Advertising remote topic actuator_servos_trim INFO [muorb] SLPI: Ok executing command: control_allocator start INFO [qshell] qshell return value timestamp: 68577984, local time: 68579385 INFO [qshell] Send cmd: 'rc_update start' INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic INFO [muorb] SLPI: qshell gotten: rc_update start INFO [muorb] SLPI: arg0 = 'rc_update' INFO [muorb] SLPI: arg1 = 'start' INFO [muorb] SLPI: Ok executing command: rc_update start INFO [qshell] qshell return value timestamp: 68873945, local time: 68874998 INFO [qshell] Send cmd: 'commander start' INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic INFO [muorb] SLPI: qshell gotten: commander start INFO [muorb] SLPI: arg0 = 'commander' INFO [muorb] SLPI: arg1 = 'start' INFO [muorb] SLPI: Creating pthread commander INFO [muorb] SLPI: Successfully created px4 task PX4_commander with tid 2097641 INFO [uORB] Advertising remote topic led_control INFO [muorb] SLPI: LED: open /dev/led0 failed (22) INFO [muorb] SLPI: Ok executing command: commander start INFO [uORB] Advertising remote topic tune_control INFO [qshell] qshell return value timestamp: 69104924, local time: 69107190 INFO [uORB] Advertising remote topic event INFO [uORB] Advertising remote topic health_report INFO [uORB] Advertising remote topic failsafe_flags INFO [uORB] Advertising remote topic actuator_armed INFO [uORB] Advertising remote topic vehicle_control_mode INFO [uORB] Advertising remote topic vehicle_thrust_setpoint INFO [uORB] Advertising remote topic vehicle_torque_setpoint INFO [uORB] Advertising remote topic vehicle_rates_setpoint INFO [uORB] Advertising remote topic vehicle_status INFO [uORB] Advertising remote topic failure_detector_status INFO [uORB] Advertising remote topic vehicle_local_position_setpoint INFO [uORB] Advertising remote topic vehicle_attitude_setpoint INFO [qshell] Send cmd: 'commander mode manual' INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic INFO [muorb] SLPI: qshell gotten: commander mode manual INFO [muorb] SLPI: arg0 = 'commander' INFO [muorb] SLPI: arg1 = 'mode' INFO [muorb] SLPI: arg2 = 'manual' INFO [uORB] Advertising remote topic vehicle_command INFO [muorb] SLPI: Ok executing command: commander mode manual INFO [qshell] qshell return value timestamp: 69148498, local time: 69150136 INFO [uORB] Advertising remote topic vehicle_command_ack INFO [uORB] Marking DeviceNode(vehicle_attitude_setpoint) as advertised in process_remote_topic INFO [qshell] Send cmd: 'param_set_selector start' INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic INFO [muorb] SLPI: qshell gotten: param_set_selector start INFO [muorb] SLPI: arg0 = 'param_set_selector' INFO [muorb] SLPI: arg1 = 'start' INFO [muorb] SLPI: Ok executing command: param_set_selector start INFO [qshell] qshell return value timestamp: 69186104, local time: 69187696 INFO [qshell] Send cmd: 'flight_mode_manager start' INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic INFO [muorb] SLPI: qshell gotten: flight_mode_manager start INFO [muorb] SLPI: arg0 = 'flight_mode_manager' INFO [muorb] SLPI: arg1 = 'start' INFO [uORB] Marking DeviceNode(vehicle_command) as advertised in process_remote_topic INFO [muorb] SLPI: Ok executing command: flight_mode_manager start INFO [qshell] qshell return value timestamp: 69346243, local time: 69347753 INFO [uORB] Advertising remote topic actuator_controls_status_0 INFO [dataman] data manager file '/data/px4/dataman' size is 7866640 bytes INFO [muorb] SLPI: Advertising remote topic transponder_report INFO [muorb] SLPI: Advertising remote topic rtl_time_estimate INFO [muorb] SLPI: Advertising remote topic position_setpoint_triplet INFO [mavlink] mode: Onboard, data rate: 100000 B/s on udp port 14556 remote port 14557 INFO [muorb] SLPI: Advertising remote topic telemetry_status INFO [mavlink] partner IP: 127.0.0.1 INFO [muorb] SLPI: Advertising remote topic vehicle_visual_odometry INFO [muorb] SLPI: Advertising remote topic obstacle_distance INFO [muorb] SLPI: Advertising remote topic offboard_control_mode INFO [muorb] SLPI: Advertising remote topic timesync_status INFO [uORB] Advertising remote topic estimator_aid_src_ev_hgt INFO [uORB] Advertising remote topic estimator_aid_src_ev_pos INFO [uORB] Advertising remote topic estimator_aid_src_ev_vel INFO [uORB] Advertising remote topic estimator_aid_src_ev_yaw INFO [mavlink] mode: Normal, data rate: 100000 B/s on udp port 14558 remote port 14559 INFO [muorb] SLPI: Marking DeviceNode(telemetry_status) as advertised in process_remote_topic INFO [mavlink] partner IP: 127.0.0.1 INFO [mavlink] MAVLink only on localhost (set param MAV_{i}_BROADCAST = 1 to enable network) INFO [px4] Startup script returned successfully INFO [muorb] SLPI: u-blox firmware version: SPG 3.01 INFO [muorb] SLPI: u-blox protocol version: 18.00 INFO [muorb] SLPI: u-blox module: NEO-M8N-0 INFO [uORB] Advertising remote topic sensor_gps INFO [muorb] SLPI: Advertising remote topic ping INFO [uORB] Advertising remote topic mavlink_log INFO [muorb] SLPI: Connection to ground station lost INFO [muorb] SLPI: GCS connection regained INFO [muorb] SLPI: Connection to ground station lost INFO [muorb] SLPI: GCS connection regained INFO [muorb] SLPI: Connection to ground station lost INFO [muorb] SLPI: GCS connection regained INFO [muorb] SLPI: Connection to ground station lost INFO [muorb] SLPI: GCS connection regained INFO [muorb] SLPI: Connection to ground station lost INFO [muorb] SLPI: GCS connection regained INFO [muorb] SLPI: Connection to ground station lost INFO [muorb] SLPI: GCS connection regained INFO [muorb] SLPI: Connection to ground station lost INFO [muorb] SLPI: GCS connection regained INFO [muorb] SLPI: Connection to ground station lost INFO [muorb] SLPI: GCS connection regained INFO [muorb] SLPI: Connection to ground station lost INFO [muorb] SLPI: GCS connection regained INFO [muorb] SLPI: Connection to ground station lost INFO [muorb] SLPI: GCS connection regained INFO [muorb] SLPI: Connection to ground station lost INFO [muorb] SLPI: GCS connection regained INFO [muorb] SLPI: Connection to ground station lost INFO [muorb] SLPI: GCS connection regained WARN [uORB] orb_advertise_multi: failed to set queue size -
@Eric-Katzfey
I tried this method, but it still is not working! Here is the console:Sending initialization request Got topic data before configuration complete Got topic data before configuration complete Got topic data before configuration complete Got topic data before configuration complete Got topic data before configuration complete Got topic data before configuration complete Got topic data before configuration complete Got topic data before configuration complete Got topic data before configuration complete Got topic data before configuration complete Got topic data before configuration complete Got topic data before configuration complete Got topic data before configuration complete INFO [muorb] SLPI: muorb aggregator thread running INFO [muorb] muorb protobuf initalize method succeeded INFO [muorb] succesfully did ADVERTISE_TEST_TYPE INFO [muorb] SLPI: Creating pthread test_MUORB INFO [muorb] SLPI: Successfully created px4 task PX4_test_MUORB with tid 2097656 INFO [muorb] succesfully did SUBSCRIBE_TEST_TYPE INFO [muorb] SLPI: Creating pthread test_MUORB INFO [muorb] SLPI: Successfully created px4 task PX4_test_MUORB with tid 2097655 INFO [muorb] succesfully did TOPIC_TEST_TYPE INFO [muorb] SLPI: Creating pthread test_MUORB INFO [muorb] SLPI: Successfully created px4 task PX4_test_MUORB with tid 2097654 INFO [muorb] succesfully did UNSUBSCRIBE_TEST_TYPE INFO [muorb] SLPI: Creating pthread test_MUORB INFO [muorb] SLPI: Successfully created px4 task PX4_test_MUORB with tid 2097653 INFO [muorb] muorb test passed INFO [muorb] SLPI: Advertising remote topic log_message ______ __ __ ___ | ___ \ \ \ / / / | | |_/ / \ V / / /| | | __/ / \ / /_| | | | / /^\ \ \___ | \_| \/ \/ |_/ px4 starting. INFO [px4] startup script: /bin/sh /usr/bin/voxl-px4-start 0 INFO [parameters] Starting param sync THREAD ************************* GPS: HOLYBRO RC: SPEKTRUM OSD: DISABLE EXTRA STEPS: ************************* INFO [muorb] SLPI: Starting param sync THREAD Running on M0054 INFO [muorb] SLPI: before starting the qshell_entry task INFO [muorb] SLPI: Creating pthread qshell INFO [muorb] SLPI: Successfully created px4 task PX4_qshell with tid 2097652 INFO [muorb] SLPI: qshell entry..... INFO [muorb] SLPI: after starting the qshell_entry task INFO [muorb] SLPI: Init app map initialized INFO [param] selected parameter default file /data/px4/param/parameters INFO [muorb] SLPI: Marking DeviceNode(parameter_client_reset_request) as advertised in process_remote_topic INFO [uORB] Marking DeviceNode(parameter_client_reset_response) as advertised in process_remote_topic INFO [muorb] SLPI: Advertising remote topic parameter_update INFO [muorb] SLPI: Marking DeviceNode(parameter_client_set_value_request) as advertised in process_remote_to INFO [uORB] Marking DeviceNode(parameter_server_set_used_request) as advertised in process_remote_topic INFO [muorb] SLPI: Marking DeviceNode(parameter_server_set_used_response) as advertised in process_remote_to INFO [uORB] Marking DeviceNode(parameter_client_set_value_response) as advertised in process_remote_topic INFO [parameters] BSON document size 3022 bytes, decoded 3022 bytes (INT32:43, FLOAT:98) INFO [logger] logger started (mode=all) Starting IMU driver with no rotation INFO [qshell] Send cmd: 'icm42688p start -s' INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic INFO [muorb] SLPI: qshell gotten: icm42688p start -s INFO [muorb] SLPI: arg0 = 'icm42688p' INFO [muorb] SLPI: arg1 = 'start' INFO [muorb] SLPI: arg2 = '-s' INFO [muorb] SLPI: *** SPI Device ID 0x26000a 2490378 INFO [uORB] Advertising remote topic sensor_accel INFO [uORB] Advertising remote topic sensor_gyro INFO [muorb] SLPI: ICM42688P::probe successful! INFO [muorb] SLPI: on SPI bus 1 INFO [muorb] SLPI: >>> ICM42688P this: 3176e460 INFO [muorb] SLPI: icm42688p #0 on SPI bus 1 INFO [muorb] SLPI: INFO [muorb] SLPI: Ok executing command: icm42688p start -s INFO [uORB] Advertising remote topic qshell_retval INFO [muorb] SLPI: >>> ICM42688P this: 3176e460 INFO [qshell] qshell return value timestamp: 63895427, local time: 63898740 INFO [muorb] SLPI: >>> ICM42688P this: 3176e460 INFO [muorb] SLPI: Register interrupt b21d3164 e620e69c 3176e460 INFO [uORB] Advertising remote topic sensor_gyro_fifo INFO [uORB] Advertising remote topic sensor_accel_fifo INFO [uORB] Advertising remote topic imu_server INFO [muorb] SLPI: >>> ICM42688P this: 3176e460 INFO [qshell] Send cmd: 'icp101xx start -I -b 5' INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic INFO [muorb] SLPI: qshell gotten: icp101xx start -I -b 5 INFO [muorb] SLPI: arg0 = 'icp101xx' INFO [muorb] SLPI: arg1 = 'start' INFO [muorb] SLPI: arg2 = '-I' INFO [muorb] SLPI: arg3 = '-b' INFO [muorb] SLPI: arg4 = '5' INFO [muorb] SLPI: *** I2C Device ID 0xb76329 12018473 INFO [muorb] SLPI: icp101xx #0 on I2C bus 5 INFO [muorb] SLPI: address 0x63 INFO [muorb] SLPI: INFO [muorb] SLPI: Ok executing command: icp101xx start -I -b 5 INFO [qshell] qshell return value timestamp: 64943196, local time: 64943952 Starting Holybro magnetometer INFO [qshell] Send cmd: 'ist8310 start -R 10 -X -b 1' INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic INFO [muorb] SLPI: qshell gotten: ist8310 start -R 10 -X -b 1 INFO [muorb] SLPI: arg0 = 'ist8310' INFO [muorb] SLPI: arg1 = 'start' INFO [muorb] SLPI: arg2 = '-R' INFO [muorb] SLPI: arg3 = '10' INFO [muorb] SLPI: arg4 = '-X' INFO [muorb] SLPI: arg5 = '-b' INFO [muorb] SLPI: arg6 = '1' INFO [muorb] SLPI: *** I2C Device ID 0x60e09 396809 INFO [muorb] SLPI: ist8310 #0 on I2C bus 1 INFO [muorb] SLPI: (external) INFO [muorb] SLPI: address 0xE INFO [muorb] SLPI: rotation 10 INFO [muorb] SLPI: INFO [muorb] SLPI: Ok executing command: ist8310 start -R 10 -X -b 1 INFO [qshell] qshell return value timestamp: 64990484, local time: 64992712 INFO [qshell] Send cmd: 'gps start' INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic INFO [muorb] SLPI: qshell gotten: gps start INFO [muorb] SLPI: arg0 = 'gps' INFO [muorb] SLPI: arg1 = 'start' INFO [muorb] SLPI: Creating pthread gps INFO [muorb] SLPI: Successfully created px4 task PX4_gps with tid 2097648 INFO [muorb] SLPI: Ok executing command: gps start INFO [qshell] qshell return value timestamp: 65023088, local time: 65025096 Starting Holybro LED driver INFO [qshell] Send cmd: 'rgbled_ncp5623c start -X -b 1 -f 400 -a 56' INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic INFO [muorb] SLPI: qshell gotten: rgbled_ncp5623c start -X -b 1 -f 400 -a 56 INFO [muorb] SLPI: arg0 = 'rgbled_ncp5623c' INFO [muorb] SLPI: arg1 = 'start' INFO [muorb] SLPI: arg2 = '-X' INFO [muorb] SLPI: arg3 = '-b' INFO [muorb] SLPI: arg4 = '1' INFO [muorb] SLPI: arg5 = '-f' INFO [muorb] SLPI: arg6 = '400' INFO [muorb] SLPI: arg7 = '-a' INFO [muorb] SLPI: arg8 = '56' INFO [muorb] SLPI: *** I2C Device ID 0x7b3809 8075273 INFO [muorb] SLPI: rgbled_ncp5623c #0 on I2C bus 1 INFO [muorb] SLPI: (external) INFO [muorb] SLPI: address 0x38 INFO [muorb] SLPI: INFO [muorb] SLPI: Ok executing command: rgbled_ncp5623c start -X -b 1 -f 400 -a 56 INFO [qshell] qshell return value timestamp: 65062554, local time: 65063907 INFO [uORB] Advertising remote topic sensor_mag INFO [qshell] Send cmd: 'modal_io start' INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic INFO [muorb] SLPI: qshell gotten: modal_io start INFO [muorb] SLPI: arg0 = 'modal_io' INFO [muorb] SLPI: arg1 = 'start' INFO [uORB] Advertising remote topic actuator_outputs INFO [uORB] Advertising remote topic sensor_baro INFO [muorb] SLPI: Ok executing command: modal_io start INFO [muorb] SLPI: Opened UART ESC device INFO [qshell] qshell return value timestamp: 65169377, local time: 65171079 INFO [uORB] Advertising remote topic actuator_outputs_debug INFO [uORB] Advertising remote topic esc_status Starting Spektrum RC INFO [qshell] Send cmd: 'spektrum_rc start' INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic INFO [muorb] SLPI: qshell gotten: spektrum_rc start INFO [muorb] SLPI: arg0 = 'spektrum_rc' INFO [muorb] SLPI: arg1 = 'start' INFO [muorb] SLPI: Creating pthread spektrum_rc_main INFO [muorb] SLPI: Successfully created px4 task PX4_spektrum_rc_main with tid 2097645 INFO [muorb] SLPI: Ok executing command: spektrum_rc start INFO [qshell] qshell return value timestamp: 66215910, local time: 66216633 INFO [qshell] Send cmd: 'voxlpm start -X -b 2' INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic INFO [muorb] SLPI: qshell gotten: voxlpm start -X -b 2 INFO [muorb] SLPI: arg0 = 'voxlpm' INFO [muorb] SLPI: arg1 = 'start' INFO [muorb] SLPI: arg2 = '-X' INFO [muorb] SLPI: arg3 = '-b' INFO [muorb] SLPI: arg4 = '2' INFO [muorb] SLPI: *** I2C Device ID 0xd24411 13779985 INFO [muorb] SLPI: Set i2c address 0x6a, fd 3 INFO [muorb] SLPI: Set i2c address 0x44, fd 3 INFO [uORB] Advertising remote topic battery_status INFO [muorb] SLPI: voxlpm #0 on I2C bus 2 INFO [muorb] SLPI: (external) INFO [muorb] SLPI: address 0x44 INFO [muorb] SLPI: INFO [muorb] SLPI: Ok executing command: voxlpm start -X -b 2 INFO [uORB] Advertising remote topic power_monitor INFO [qshell] qshell return value timestamp: 67272854, local time: 67275718 INFO [qshell] Send cmd: 'sensors start' INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic INFO [muorb] SLPI: qshell gotten: sensors start INFO [muorb] SLPI: arg0 = 'sensors' INFO [muorb] SLPI: arg1 = 'start' INFO [uORB] Advertising remote topic sensor_selection INFO [uORB] Advertising remote topic sensors_status_imu INFO [uORB] Advertising remote topic vehicle_acceleration INFO [uORB] Advertising remote topic vehicle_angular_velocity INFO [uORB] Advertising remote topic sensor_combined INFO [uORB] Advertising remote topic vehicle_air_data INFO [uORB] Advertising remote topic vehicle_gps_position INFO [uORB] Advertising remote topic vehicle_magnetometer INFO [uORB] Advertising remote topic sensor_preflight_mag INFO [uORB] Advertising remote topic vehicle_imu INFO [uORB] Advertising remote topic vehicle_imu_status INFO [muorb] SLPI: Ok executing command: sensors start INFO [uORB] Advertising remote topic sensors_status_mag INFO [qshell] qshell return value timestamp: 67434965, local time: 67437421 INFO [uORB] Advertising remote topic sensors_status_baro INFO [qshell] Send cmd: 'ekf2 start' INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic INFO [muorb] SLPI: qshell gotten: ekf2 start INFO [muorb] SLPI: arg0 = 'ekf2' INFO [muorb] SLPI: arg1 = 'start' INFO [uORB] Advertising remote topic vehicle_attitude INFO [uORB] Advertising remote topic vehicle_local_position INFO [uORB] Advertising remote topic estimator_event_flags INFO [uORB] Advertising remote topic estimator_innovation_test_ratios INFO [uORB] Advertising remote topic estimator_innovation_variances INFO [uORB] Advertising remote topic estimator_innovations INFO [uORB] Advertising remote topic estimator_sensor_bias INFO [uORB] Advertising remote topic estimator_states INFO [uORB] Advertising remote topic estimator_status_flags INFO [uORB] Advertising remote topic estimator_status INFO [muorb] SLPI: Ok executing command: ekf2 start INFO [qshell] qshell return value timestamp: 67750482, local time: 67753672 INFO [uORB] Advertising remote topic ekf2_timestamps INFO [uORB] Advertising remote topic vehicle_odometry INFO [uORB] Advertising remote topic estimator_aid_src_baro_hgt INFO [uORB] Advertising remote topic estimator_aid_src_fake_pos INFO [uORB] Advertising remote topic estimator_aid_src_fake_hgt INFO [uORB] Advertising remote topic estimator_aid_src_mag_heading INFO [uORB] Advertising remote topic estimator_aid_src_mag INFO [uORB] Advertising remote topic estimator_aid_src_gravity INFO [qshell] Send cmd: 'mc_pos_control start' INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic INFO [muorb] SLPI: qshell gotten: mc_pos_control start INFO [muorb] SLPI: arg0 = 'mc_pos_control' INFO [muorb] SLPI: arg1 = 'start' INFO [uORB] Advertising remote topic takeoff_status INFO [muorb] SLPI: Ok executing command: mc_pos_control start INFO [qshell] qshell return value timestamp: 67859638, local time: 67861554 INFO [qshell] Send cmd: 'mc_att_control start' INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic INFO [muorb] SLPI: qshell gotten: mc_att_control start INFO [muorb] SLPI: arg0 = 'mc_att_control' INFO [muorb] SLPI: arg1 = 'start' INFO [muorb] SLPI: Ok executing command: mc_att_control start INFO [qshell] qshell return value timestamp: 67918747, local time: 67920290 INFO [qshell] Send cmd: 'mc_rate_control start' INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic INFO [muorb] SLPI: qshell gotten: mc_rate_control start INFO [muorb] SLPI: arg0 = 'mc_rate_control' INFO [muorb] SLPI: arg1 = 'start' INFO [uORB] Advertising remote topic rate_ctrl_status INFO [muorb] SLPI: Ok executing command: mc_rate_control start INFO [qshell] qshell return value timestamp: 68027813, local time: 68030404 INFO [qshell] Send cmd: 'mc_hover_thrust_estimator start' INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic INFO [muorb] SLPI: qshell gotten: mc_hover_thrust_estimator start INFO [muorb] SLPI: arg0 = 'mc_hover_thrust_estimator' INFO [muorb] SLPI: arg1 = 'start' INFO [muorb] SLPI: Ok executing command: mc_hover_thrust_estimator start INFO [qshell] qshell return value timestamp: 68087592, local time: 68089224 INFO [qshell] Send cmd: 'mc_autotune_attitude_control start' INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic INFO [muorb] SLPI: qshell gotten: mc_autotune_attitude_control start INFO [muorb] SLPI: arg0 = 'mc_autotune_attitude_control' INFO [muorb] SLPI: arg1 = 'start' INFO [uORB] Advertising remote topic autotune_attitude_control_status INFO [muorb] SLPI: Ok executing command: mc_autotune_attitude_control start INFO [qshell] qshell return value timestamp: 68137157, local time: 68138847 INFO [qshell] Send cmd: 'land_detector start multicopter' INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic INFO [muorb] SLPI: qshell gotten: land_detector start multicopter INFO [muorb] SLPI: arg0 = 'land_detector' INFO [muorb] SLPI: arg1 = 'start' INFO [muorb] SLPI: arg2 = 'multicopter' INFO [muorb] SLPI: Ok executing command: land_detector start multicopter INFO [qshell] qshell return value timestamp: 68188877, local time: 68189722 INFO [uORB] Advertising remote topic vehicle_land_detected INFO [qshell] Send cmd: 'manual_control start' INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic INFO [muorb] SLPI: qshell gotten: manual_control start INFO [muorb] SLPI: arg0 = 'manual_control' INFO [muorb] SLPI: arg1 = 'start' INFO [muorb] SLPI: Ok executing command: manual_control start INFO [uORB] Advertising remote topic manual_control_setpoint INFO [qshell] qshell return value timestamp: 68237903, local time: 68239705 INFO [qshell] Send cmd: 'control_allocator start' INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic INFO [muorb] SLPI: qshell gotten: control_allocator start INFO [muorb] SLPI: arg0 = 'control_allocator' INFO [muorb] SLPI: arg1 = 'start' INFO [uORB] Advertising remote topic control_allocator_status INFO [uORB] Marking DeviceNode(control_allocator_status) as advertised in process_remote_topic INFO [uORB] Advertising remote topic actuator_motors INFO [uORB] Advertising remote topic actuator_servos INFO [uORB] Advertising remote topic actuator_servos_trim INFO [muorb] SLPI: Ok executing command: control_allocator start INFO [qshell] qshell return value timestamp: 68577984, local time: 68579385 INFO [qshell] Send cmd: 'rc_update start' INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic INFO [muorb] SLPI: qshell gotten: rc_update start INFO [muorb] SLPI: arg0 = 'rc_update' INFO [muorb] SLPI: arg1 = 'start' INFO [muorb] SLPI: Ok executing command: rc_update start INFO [qshell] qshell return value timestamp: 68873945, local time: 68874998 INFO [qshell] Send cmd: 'commander start' INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic INFO [muorb] SLPI: qshell gotten: commander start INFO [muorb] SLPI: arg0 = 'commander' INFO [muorb] SLPI: arg1 = 'start' INFO [muorb] SLPI: Creating pthread commander INFO [muorb] SLPI: Successfully created px4 task PX4_commander with tid 2097641 INFO [uORB] Advertising remote topic led_control INFO [muorb] SLPI: LED: open /dev/led0 failed (22) INFO [muorb] SLPI: Ok executing command: commander start INFO [uORB] Advertising remote topic tune_control INFO [qshell] qshell return value timestamp: 69104924, local time: 69107190 INFO [uORB] Advertising remote topic event INFO [uORB] Advertising remote topic health_report INFO [uORB] Advertising remote topic failsafe_flags INFO [uORB] Advertising remote topic actuator_armed INFO [uORB] Advertising remote topic vehicle_control_mode INFO [uORB] Advertising remote topic vehicle_thrust_setpoint INFO [uORB] Advertising remote topic vehicle_torque_setpoint INFO [uORB] Advertising remote topic vehicle_rates_setpoint INFO [uORB] Advertising remote topic vehicle_status INFO [uORB] Advertising remote topic failure_detector_status INFO [uORB] Advertising remote topic vehicle_local_position_setpoint INFO [uORB] Advertising remote topic vehicle_attitude_setpoint INFO [qshell] Send cmd: 'commander mode manual' INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic INFO [muorb] SLPI: qshell gotten: commander mode manual INFO [muorb] SLPI: arg0 = 'commander' INFO [muorb] SLPI: arg1 = 'mode' INFO [muorb] SLPI: arg2 = 'manual' INFO [uORB] Advertising remote topic vehicle_command INFO [muorb] SLPI: Ok executing command: commander mode manual INFO [qshell] qshell return value timestamp: 69148498, local time: 69150136 INFO [uORB] Advertising remote topic vehicle_command_ack INFO [uORB] Marking DeviceNode(vehicle_attitude_setpoint) as advertised in process_remote_topic INFO [qshell] Send cmd: 'param_set_selector start' INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic INFO [muorb] SLPI: qshell gotten: param_set_selector start INFO [muorb] SLPI: arg0 = 'param_set_selector' INFO [muorb] SLPI: arg1 = 'start' INFO [muorb] SLPI: Ok executing command: param_set_selector start INFO [qshell] qshell return value timestamp: 69186104, local time: 69187696 INFO [qshell] Send cmd: 'flight_mode_manager start' INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic INFO [muorb] SLPI: qshell gotten: flight_mode_manager start INFO [muorb] SLPI: arg0 = 'flight_mode_manager' INFO [muorb] SLPI: arg1 = 'start' INFO [uORB] Marking DeviceNode(vehicle_command) as advertised in process_remote_topic INFO [muorb] SLPI: Ok executing command: flight_mode_manager start INFO [qshell] qshell return value timestamp: 69346243, local time: 69347753 INFO [uORB] Advertising remote topic actuator_controls_status_0 INFO [dataman] data manager file '/data/px4/dataman' size is 7866640 bytes INFO [muorb] SLPI: Advertising remote topic transponder_report INFO [muorb] SLPI: Advertising remote topic rtl_time_estimate INFO [muorb] SLPI: Advertising remote topic position_setpoint_triplet INFO [mavlink] mode: Onboard, data rate: 100000 B/s on udp port 14556 remote port 14557 INFO [muorb] SLPI: Advertising remote topic telemetry_status INFO [mavlink] partner IP: 127.0.0.1 INFO [muorb] SLPI: Advertising remote topic vehicle_visual_odometry INFO [muorb] SLPI: Advertising remote topic obstacle_distance INFO [muorb] SLPI: Advertising remote topic offboard_control_mode INFO [muorb] SLPI: Advertising remote topic timesync_status INFO [uORB] Advertising remote topic estimator_aid_src_ev_hgt INFO [uORB] Advertising remote topic estimator_aid_src_ev_pos INFO [uORB] Advertising remote topic estimator_aid_src_ev_vel INFO [uORB] Advertising remote topic estimator_aid_src_ev_yaw INFO [mavlink] mode: Normal, data rate: 100000 B/s on udp port 14558 remote port 14559 INFO [muorb] SLPI: Marking DeviceNode(telemetry_status) as advertised in process_remote_topic INFO [mavlink] partner IP: 127.0.0.1 INFO [mavlink] MAVLink only on localhost (set param MAV_{i}_BROADCAST = 1 to enable network) INFO [px4] Startup script returned successfully INFO [muorb] SLPI: u-blox firmware version: SPG 3.01 INFO [muorb] SLPI: u-blox protocol version: 18.00 INFO [muorb] SLPI: u-blox module: NEO-M8N-0 INFO [uORB] Advertising remote topic sensor_gps INFO [muorb] SLPI: Advertising remote topic ping INFO [uORB] Advertising remote topic mavlink_log INFO [muorb] SLPI: Connection to ground station lost INFO [muorb] SLPI: GCS connection regained INFO [muorb] SLPI: Connection to ground station lost INFO [muorb] SLPI: GCS connection regained INFO [muorb] SLPI: Connection to ground station lost INFO [muorb] SLPI: GCS connection regained INFO [muorb] SLPI: Connection to ground station lost INFO [muorb] SLPI: GCS connection regained INFO [muorb] SLPI: Connection to ground station lost INFO [muorb] SLPI: GCS connection regained INFO [muorb] SLPI: Connection to ground station lost INFO [muorb] SLPI: GCS connection regained INFO [muorb] SLPI: Connection to ground station lost INFO [muorb] SLPI: GCS connection regained INFO [muorb] SLPI: Connection to ground station lost INFO [muorb] SLPI: GCS connection regained INFO [muorb] SLPI: Connection to ground station lost INFO [muorb] SLPI: GCS connection regained INFO [muorb] SLPI: Connection to ground station lost INFO [muorb] SLPI: GCS connection regained INFO [muorb] SLPI: Connection to ground station lost INFO [muorb] SLPI: GCS connection regained INFO [muorb] SLPI: Connection to ground station lost INFO [muorb] SLPI: GCS connection regained WARN [uORB] orb_advertise_multi: failed to set queue size@Captain-7th Are you saying that the GPS is not working? I don't see anything in the included logs to indicate that GPS is not working.
-
@Captain-7th Are you saying that the GPS is not working? I don't see anything in the included logs to indicate that GPS is not working.
@Eric-Katzfey Dear Eric,
The log shows that the voxl-px4 is does not get completed and it crashes after a while:
INFO [muorb] SLPI: GCS connection regained INFO [muorb] SLPI: Connection to ground station lost INFO [muorb] SLPI: GCS connection regained INFO [muorb] SLPI: Connection to ground station lost INFO [muorb] SLPI: GCS connection regained INFO [muorb] SLPI: Connection to ground station lost INFO [muorb] SLPI: GCS connection regained INFO [muorb] SLPI: Connection to ground station lost INFO [muorb] SLPI: GCS connection regained INFO [muorb] SLPI: Connection to ground station lost INFO [muorb] SLPI: GCS connection regained INFO [muorb] SLPI: Connection to ground station lost INFO [muorb] SLPI: GCS connection regained INFO [muorb] SLPI: Connection to ground station lost INFO [muorb] SLPI: GCS connection regained INFO [muorb] SLPI: Connection to ground station lost INFO [muorb] SLPI: GCS connection regained INFO [muorb] SLPI: Connection to ground station lost INFO [muorb] SLPI: GCS connection regained INFO [muorb] SLPI: Connection to ground station lost INFO [muorb] SLPI: GCS connection regained INFO [muorb] SLPI: Connection to ground station lost INFO [muorb] SLPI: GCS connection regained WARN [uORB] orb_advertise_multi: failed to set queue sizewhat are these errors? after these messages, I couldn't run again the voxl-px4 again! so I decided the follow this way:
After reading some posts, I decided to upgrade the SDK version to the latest. I tried to upgrade the SDK from 1.0.0 to 1.3.0. Then running "apt update && apt upgrade"
Then, followed some hints from you that you mentioned in some other post. I found the /usr/bin/voxl-px4-start file and added these commands at the end of the file:
- qshell gps stop
- /bin/sleep 1
- qshell gps start -b 9600
Then, in my browser (HTTP://ip.address), it shows 255 satellites, but the GPS is still blinking in red color (should it be blue color?) Also, I checked the QGS app, it does not show the number of satellites and the drone location on the map. (I am in an indoor env, but I put the drone very close to the open window.)
-
@Eric-Katzfey Dear Eric,
The log shows that the voxl-px4 is does not get completed and it crashes after a while:
INFO [muorb] SLPI: GCS connection regained INFO [muorb] SLPI: Connection to ground station lost INFO [muorb] SLPI: GCS connection regained INFO [muorb] SLPI: Connection to ground station lost INFO [muorb] SLPI: GCS connection regained INFO [muorb] SLPI: Connection to ground station lost INFO [muorb] SLPI: GCS connection regained INFO [muorb] SLPI: Connection to ground station lost INFO [muorb] SLPI: GCS connection regained INFO [muorb] SLPI: Connection to ground station lost INFO [muorb] SLPI: GCS connection regained INFO [muorb] SLPI: Connection to ground station lost INFO [muorb] SLPI: GCS connection regained INFO [muorb] SLPI: Connection to ground station lost INFO [muorb] SLPI: GCS connection regained INFO [muorb] SLPI: Connection to ground station lost INFO [muorb] SLPI: GCS connection regained INFO [muorb] SLPI: Connection to ground station lost INFO [muorb] SLPI: GCS connection regained INFO [muorb] SLPI: Connection to ground station lost INFO [muorb] SLPI: GCS connection regained INFO [muorb] SLPI: Connection to ground station lost INFO [muorb] SLPI: GCS connection regained WARN [uORB] orb_advertise_multi: failed to set queue sizewhat are these errors? after these messages, I couldn't run again the voxl-px4 again! so I decided the follow this way:
After reading some posts, I decided to upgrade the SDK version to the latest. I tried to upgrade the SDK from 1.0.0 to 1.3.0. Then running "apt update && apt upgrade"
Then, followed some hints from you that you mentioned in some other post. I found the /usr/bin/voxl-px4-start file and added these commands at the end of the file:
- qshell gps stop
- /bin/sleep 1
- qshell gps start -b 9600
Then, in my browser (HTTP://ip.address), it shows 255 satellites, but the GPS is still blinking in red color (should it be blue color?) Also, I checked the QGS app, it does not show the number of satellites and the drone location on the map. (I am in an indoor env, but I put the drone very close to the open window.)
@Captain-7th The connection to ground station has nothing to do with GPS. That is probably something related to your wireless network link. So I still don't see why you think GPS wasn't working.
-
@Captain-7th The connection to ground station has nothing to do with GPS. That is probably something related to your wireless network link. So I still don't see why you think GPS wasn't working.
@Eric-Katzfey Could you please tell me when the GPS is working, should it start blinking blue or red? Currently, mine is red! Please also let me know how I can check my GPS is working properly or not.
-
@Eric-Katzfey Could you please tell me when the GPS is working, should it start blinking blue or red? Currently, mine is red! Please also let me know how I can check my GPS is working properly or not.
@Captain-7th That LED is a general PX4 status LED. If it is red it could indicate any number of different problems. It is not specifically tied to the GPS.
-
@Captain-7th That LED is a general PX4 status LED. If it is red it could indicate any number of different problems. It is not specifically tied to the GPS.
@Eric-Katzfey Thanks for the reply. Can you guide me on how can I check what are the problems?
Also, I have a wifi problem. Can you help me with that? My question is here: https://forum.modalai.com/topic/3600/how-to-set-up-the-voxl-wifi-station-mode-for-hidden-networks?_=1719998452051
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login