Hi @Nathan-Sullivan-0
I did reach out, but for the benefit of the other forum users, I did a little digging into the modes of the Sony ILX-LR1.
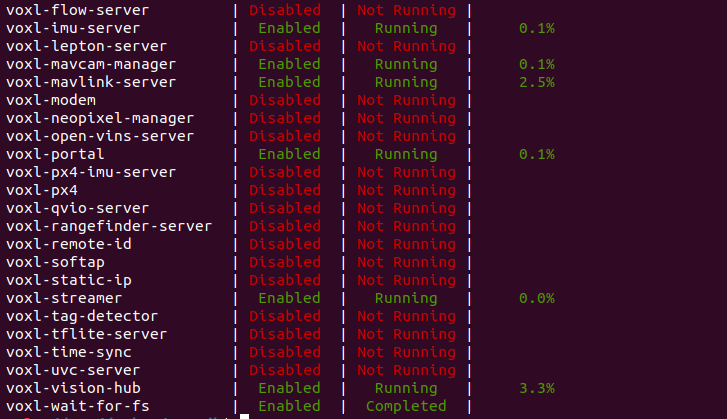
I'm wondering if there is a nuance between the camera being enabled as UVC device, but then if you are in still frame mode, sending it (very high resolution) JPEG/RAW/HEIF formats.
[image: 1722380710567-d4c38f19-0671-4139-813d-d24f9419fed8-image.png]
Maybe someone from SW can confirm, but UVC devices may only expect data in MPEG or other video formats. So, I wonder if the fact that your devices enumerate at first, but then the moment you try to use them in still image mode, things go wrong. This may be a data formatting issue.
Another thing to note: can you make sure these images come across USB at controlled ways at different times. You are trying to push a LOT of data into this one port, even those stills are at 15MB minimum. Not sure what frame rate you are using, but you may be saturating the USB link. Have you done a bandwidth analysis?
Our MCBL-00022-2 is not qualified for 10Gbps speeds, and for 5Gbps rates, we only qualified it for prototype use. Sustained very high throughput rates may require you to source a proper shielded USB3 to USB-C cable. We try to make that disclaimer clear on our Tech Docs page: [image: 1722381169057-bc9b090d-9bca-4090-b5e4-1a0166dc2298-image.png]
And the last point I want to highlight is the USB-C port on the Sony camera may be orientation dependent when not using it in USB-C modes. We are only USB-3 modes on our Hub, and I'm not sure what cable you are using to convert our USB-3 to the USB-C, but we have found that a lot of USB-C to "less-than-USB-C" cables (i.e.: USBC-to-USB3, USBC-to-USB2) actually have orientation specific insertions at the USB-C side if done cheaply. We have some in our own HQ that work like that (I'm trying to find them all and trash them )
Look forward to your email response.
Thanks!