Systems Architecture Review
-
Dear ModalAI team,
We are in the process of finalizing the (ModalAI-powered) flight systems architecture for our upcoming projects, and would love to hear your thoughts regarding the same.
We are using VOXL2 (2X TOFs, 1 HiRes & 1 Tracking) as a OBC for high-level functions and Flight Core v2 for the low-level sensor interfacing and flight stabilisation running PX4. These are connected via UART and the voxl-mavlink-server is configured for external FC support. FlightCore is further integrated with 1x UART LiDAR, 1x CAN-based Optical Flow and 1xGPS (optionally)
While we understand that VOXL2 is capable of running PX4 on-board we found the HW interfaces to the DSP on the VOXL2 a bit limited in terms of adding new sensors like (UART Rangefinder and CAN-based Optical Flow). Additionally we enjoy a few small quirks like the ability to restart the PX4 independent of the whole board.
While adding Flight Core might initially feel a bit redundant in terms of available HW, we do eliminate the need for the IO Board entirely by going this route.
While we still await hard flight test data, the hopes of adding the Optical Flow sensor is to enable the MAV to sustain flight in Position-enabled modes until VIO recovers (instead of falling over to AltHold or other manual modes). The range-finder was added to enable accurate indoor flights, as we found the in-built barometer to have quite a bit of altitude offset and drift.
We would like to hear your views on whether the route we are taking is optimal and your recommendations on how to better suite your ecosystem with our requirements (the sensor setup mentioned above).
Thanks,
Kavin Kailash Ravie
UAVIO Labs -
Thank you very much for proactively posting your question. From a high-level, this looks reasonable. We do not have experience with all of those sensors, but don't see any major roadblocks.
If you are comfortable, it would be very helpful to share a block diagram of what you plan to connect to which connectors for a little deeper review.
-
Thanks, for your quick response @Chad-Sweet .
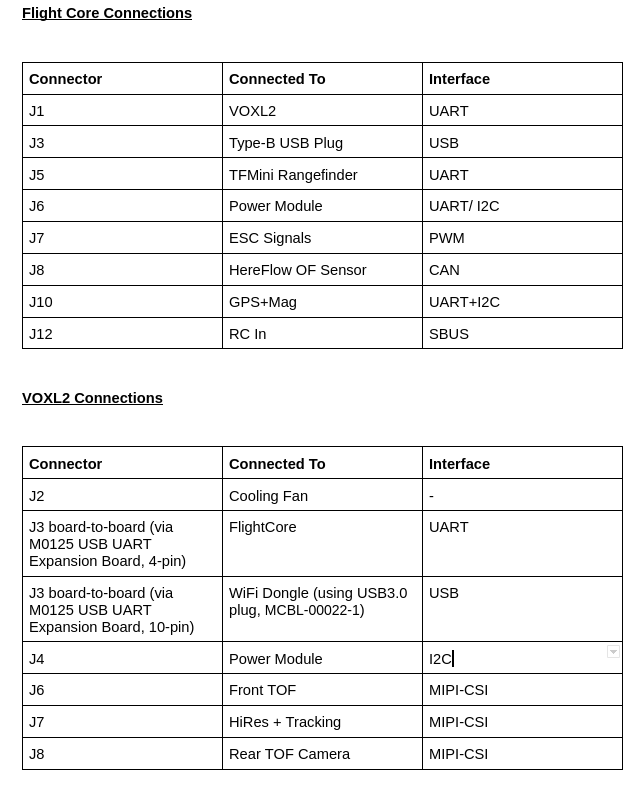
We have already flight tested part of the setup above (except HereFlow), and it seems to work great.
Please find connection details in the attached picture below:
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login