@Zachary-Lowell-0
I used the docker to build the ROS2 package following the instructions here roughly 2 months ago:
https://gitlab.com/voxl-public/voxl-sdk/utilities/voxl-mpa-to-ros2
*****voxl-mpa-to-ros2$ docker load -i qrb5165-emulator-v1.5.tar.gz
voxl-mpa-to-ros2$ docker tag qrb5165-emulator:1.5 qrb5165-emulator:latest
voxl-mpa-to-ros2$ voxl-docker -i qrb5165-emulator
qrb5165-emulator:~(master)(0.0.4)$ ./install_build_deps.sh qrb5165 dev
qrb5165-emulator:~(master)(0.0.4)$ ./build.sh qrb5165
qrb5165-emulator:~(master)(0.0.4)$ ./make_package.sh*****
I installed the build on the rb5:
*****rb5:/$ cd home/root/
rb5:~$ dpkg -i voxl-mpa-to-ros2_0.0.4_arm64.deb
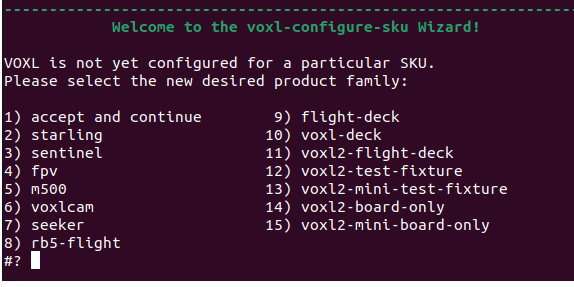
rb5:~$ voxl-configure-mpa-to-ros2
rb5:~$ source /opt/ros/foxy/mpa_to_ros2/install/setup.bash
rb5:~$ ros2 topic list
rb5:~$ source /opt/ros/foxy/setup.bash
rb5:~$ ros2 run voxl_mpa_to_ros2 voxl_mpa_to_ros2_node*****
---------------------------------After restart of the RB5
rb5:~$ ros2 run voxl_mpa_to_ros2 voxl_mpa_to_ros2_node
Found new interface: hires_large_color
Found new interface: hires_large_encoded
Found new interface: hires_large_grey
Found new interface: hires_small_color
Found new interface: hires_small_encoded
Found new interface: hires_small_grey
Found new interface: hires_snapshot
Found new interface: qvio_overlay
Found new interface: stereo
Found new interface: tracking
Found new interface: imu_px4
Found new interface: voa_pc_out
Found new interface: vvhub_body_wrt_fixed
Found new interface: vvhub_body_wrt_local
Found new interface: qvio