Offboard mode and ROS2 with Rb5
-
Hi
I have the following rb5:system-image: 1.7.1-M0052-14.1a-perf-nightly-20231025
kernel: #1 SMP PREEMPT Thu Oct 26 05:24:02 UTC 2023 4.19.125hw version: M0052
voxl-suite: 1.1.2
current IP: wlan0: 192.168.1.35
rb5:~$
Issue: When I run ros2 for figure 8 , I get the following output but the rb5 is not doing figure 8
rb5:~$ ros2 run voxl_offboard_figure8 voxl_offboard_figure8
[INFO] [1736938771.880330404] [offboard_figure8_node]: Offboard Figure 8 Node Alive!
[INFO] [1736938773.006198000] [offboard_figure8_node]: Switching to offboard mode
[INFO] [1736938773.010869569] [offboard_figure8_node]: Arm command sent
[INFO] [1736938781.907197594] [offboard_figure8_node]: Doing figure 8 now
[INFO] [1736938794.961756257] [offboard_figure8_node]: Switching to land modeAny help on this is greatly appreciated.
Best wishes,
-
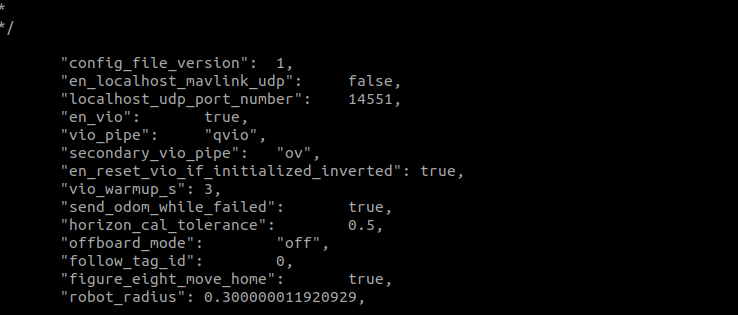
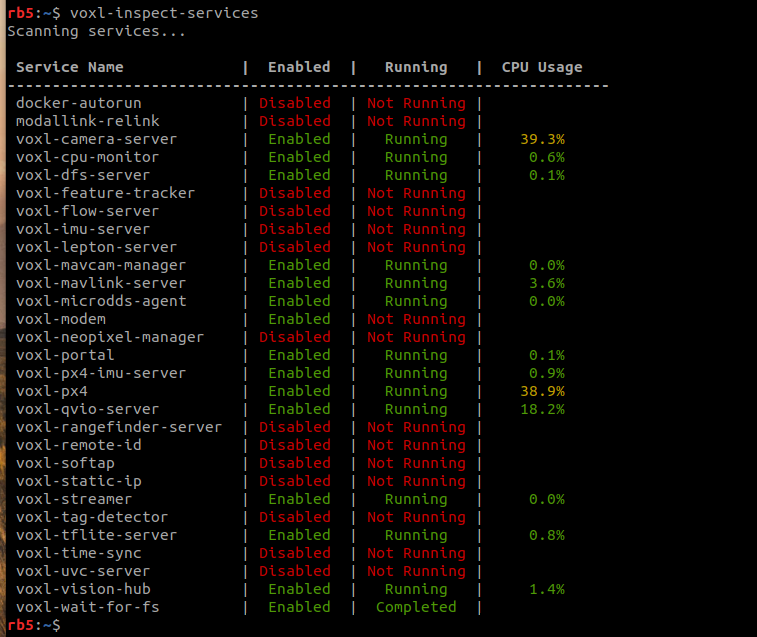
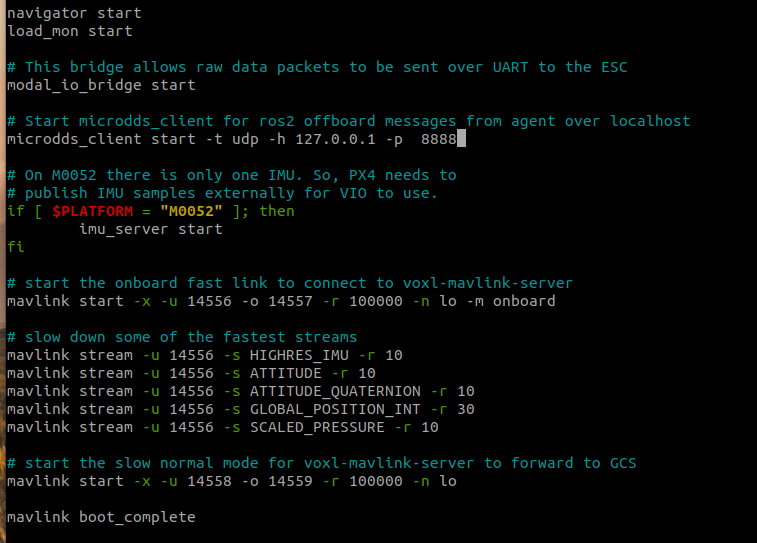
@tahawaru just to confirm you have turned off figure 8 offboard mode in voxl-vision-hub? Also does the drone arm when stating "drone arming" - lastly, do you have the dds agent running on the voxl2? There is a part of me that is nervous since you are running this on the rb5 and not a voxl2 that the px4 instance on there is quite stale and doesnt have the dds CLIENT sitting in the executable script. take a look at
/usr/bin/voxl-px4-startand check if there is reference to the dds client.Zach
-
@tahawaru just to confirm you have turned off figure 8 offboard mode in voxl-vision-hub? Also does the drone arm when stating "drone arming" - lastly, do you have the dds agent running on the voxl2? There is a part of me that is nervous since you are running this on the rb5 and not a voxl2 that the px4 instance on there is quite stale and doesnt have the dds CLIENT sitting in the executable script. take a look at
/usr/bin/voxl-px4-startand check if there is reference to the dds client.Zach
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login