Thanks for the answer, yes I already looked into the code. I was just wondering why the servers timestamp differs from the system timestamp. But then I will change the node accordingly.
R
rapit
@rapit
Posts
-
timestamps for ros messages in voxl_mpa_to_ros_node -
timestamps for ros messages in voxl_mpa_to_ros_nodeHey,
I noticed that the timestamps in the ros message header are always relative to boot time. Even if I synchronized the system time with the internet time or via chrony and restarted the services (dfs-server,voxl-vision-px4). Can I somehow get the system timestamps in my message? This is essential when being part of a larger ros network.If it is intended like that, the best way would probably to replace the stamp with some rostime in the voxl node or is there some preferred way?
Thanks
-
Position Mode RejectedHi,
I tried the voxl-cam for the first time and all seems to be working fine except that px4 is not getting into position mode.voxl-inspect-qvioprints reasonable poses, I can see the Odometry topic in QGC with 30 hz with x,y values not zero.My
EKF2_AID_MASKis280and with the same parameters and the voxl flight-deck I managed to start in position mode without GPS attached.Problem seems to be that I cannot get values in
LOCAL_POSITION_NEDand nothing is being output onuorb top vehicle_visual_odometryin a nuttx console.I made a cable to connect the pixhawk4 and the voxlcam, which is twice as long as in the old setup. The
voxl-vision-px4systemd service suggests that UART is connected, but maybe there could be some issue in sending the data?Do you have any suggestions?
Thanks!
-
qvio error when connecting a rostopic subscriber to /qvioI had the same issue. Updating the
voxl_mpa_to_rospackage resolved it for me:opkg update opkg install voxl-nodes -
OPEN-VINS compile errorHi @Chad-Sweet,
even though this is not public (yet?), I setup a docker running open-vins. It runs without problems but I keep getting fast divergent behavior. Do you happen to have a launch file / parameter settings for open-vins with good parameter estimates for the flight-deck platform? I am not sure if my I set the extrinsics correct. I thought it must be simply the inverse of the output ofvoxl-inspect-extrinsicsas open-vins expect aT_C0toImatrix:<rosparam param="cam0_wh">[640, 480]</rosparam> <param name="cam0_is_fisheye" type="bool" value="true" /> <rosparam param="cam0_k">[277.207560, 277.285144, 335.460288, 218.329580]</rosparam> <rosparam param="cam0_d">[-0.002486, 0.006832, -0.006556, 0.001300]</rosparam> <rosparam param="T_C0toI"> [ 0.0, 1.0, 0.0, -0.015, -0.70711, 0.0, 0.70711, 0.00283, 0.70711, 0.0, 0.70711, -0.0212, 0.0, 0.0, 0.0, 1.0 ] </rosparam>Another possible reason would be badly calibrated imu noise values. A reference file would be really helpful.
Thanks! -
stereo and tracking camera voxl_cam_rosGood news, I didn't know that Apriltags are already supported, maybe the docs should be updated.
I updated and all streams are working simultaneously in the new architecture. Thanks. -
stereo and tracking camera voxl_cam_rosHi,
I am trying to publish some stereo output from the flight deck via ros with runningvoxl_vision_px4in the background.
As stated in your docs I triedyocto:~# roslaunch voxl_cam_ros stereo.launch is_cam_master:=falsebut the launch always fails.ERROR: The requested frame_id(0) does not exist in the queue. [ERROR] [1627501325.921901556]: GetImageData() Unable to get Frame data for id: 0 rc: -2 [stereo/stereo_nodelet_manager-2] process has died [pid 5056, exit code -11, cmd /opt/ros/indigo/lib/nodelet/nodelet manager __name:=stereo_nodelet_manager __log:=/home/root/.ros/log/e264a974-efdb-11eb-b918-d80f995591f7/stereo-stereo_nodelet_manager-2.log].I think my id's are correct, if I stop
voxl-vision-px4.serviceand setis_cam_mastertotrueit works. It also works if I choose thestereo_merged.launchlaunchfile, even with voxl-vision-px4 in the background. Other combinations (hires, tracking) work as well so I am wondering if there is a technical limitation on this specific combination or is this supposed to work. I am still on version 2.3 as I need the Apriltag support.Thanks!
-
USB 3.0 CameraThank you Travis!
I made another cable today and it was recognized as usb3 device. I guess the quality of the first cable was too bad in the first place or I did a bad job switching the channels.
However, until now I did not manage to create a robust connection. The driver behaves wierd and especially in the docker container I was not able to use the bandwidth. This is probably usb-driver or device related so I will try to play with the kernel parameters.
Anyhow, in theory it now works, so thanks a lot! (Also for the writeup, probably others can benefit from that.)
-
USB 3.0 CameraI tried it with swapped SSRX/TX as you posted in the pinout graphic but unfortunately it is still detected as usb2 device. Any other thoughts? Do I have to adjust some config or should it work out of the box after swapping? Maybe the cable quality or my wiring skills are not good enough, I will try it again with another cable.
-
USB 3.0 CameraThank you so much for the graphic and the table! I will see what I can do to rearrange an existing cable. Even "small" cables are hard to fit into the voxl mounted on the flight deck, so it is probably easier with a custom cable than with a "large and bulky" one.
-
USB 3.0 CameraHi Travis,
thanks a lot for your effort!
I am not sure if I got it right.
@modaltb said in USB 3.0 Camera:In order for systems to use the standard micro-b to type A female OTG cables, they need to do TX/RX swapping.
I thought this was exactly the difference between the standard OTG cables, which I used before and my second approach with the micro usb type a cable (which also seems to be quite unique).
Anyway , so the special thing about the
Amphenol RUB30-0075you mentioned are swapped TX/RX ? I couldn't find anything on that cable, do you have a datasheet / pinout or any tip where one can buy it?If not, any chance I could purchase one from you directly?
Thank you!
Raphael -
USB 3.0 CameraHi,
quick question: I am trying to connect an additional USB-3 camera (Basler dart) to the flight deck. The camera has a usb3.0 micro-b port. I connected it with two high quality USB3.0 cables as follows:
(micro-b (camera) --- STD-A male) -> (STD-A female --- micro-b (voxl))The camera was detected properly and worked, but
lsusb -tshowed it was only connected with usb2.0 (480M) and unfortunately the camera driverpylontimed out a lot.Now I bought a
micro-a male --- micro-b malecable similar to the one you linked in your docs to get super speed capabilities but now the voxl cannot detect the camera at all.dmesgdoesn't show any output. I read that the port can be in host mode when using micro-a plug and in client mode when using micro-b. Why does it work when using micro-b but not at all when using micro-a?Did you try the port with similar periphery? Are there additional pitfalls? Or did I just bought 2 bad cables?
Thanks a lot!
-
mavros node on base station fcu_urlThank you, it works now. I did not think about using my local mavros as connection link between voxl and QGroundControl.
I changed the port. The original issue was a binary installed mavros which crashed when using a
gcs_url. So I thought it was a configuration problem but building mavros from source and running with your proposed configuration worked. Thank you again!Raphael
-
mavros node on base station fcu_urlHi Chad,
thank you for the link. I did read section before but I could't see how it would help me as the port on the outgoing connection is still the same.I just configured my base station ip in
ggc_ipandsecondary_qgc_ip(anden_secondary_qgc) and the connection to my ground control station is successfully initiated by voxl. But when I fire up mavros at my ground station, QGroundControl again loses the connection to voxl, so initiating "from the other direction" does not seem to solve the port conflict. -
mavros node on base station fcu_urlHi,
I usually connect my QGroundControl (running on base station) to the voxl which in my unsderstanding "routes" the mavlink data from the flight core to my base station.Sometimes I want to run a mavros instance not on the voxl but on my base station. I am not sure how to configure this node correctly in order to connect to the flight core using voxl as "wifi link". It works if I set the
fcu_urlparam like that:udp://:14550:@VOXL_IP:14556but then the link in my QGroundControl fails. I guess it is because both connections are running over port14550. I have no idea how to setfcu_urland gcs_url`. Or do I have to install additional software on the voxl to route the packages?Any help would be appreciated!
-
Send Position to px4Nevermind, apparently I looked in the wrong places:
https://dev.px4.io/master/en/ros/external_position_estimation.html has the answer:
EKF2_HGT_MODEmust be set tovisionto use the voxl odometry instead of the barometer. Closing this. -
Send Position to px4Hi,
I was wondering how I have to configure px4 to get the position estimate from voxl for position mode.The connection to
TELEM2port of my Pixhawk4 works, I am getting Odometry Messages whenvoxl-vision-px4is running. I set the px4 parameterEKF_AID_MASKto8which isvision position fusion. I completely removed GPS from my drone.When I inspect
LOCAL_POSITION_NEDmessages I see thex,ycoordinates from the odometry but thezcoordinate is very off.Any thoughts on that? Thank you!
-
AprilTags do not work in voxl-vision-px4Never mind, I updated all packages and reset all configs and it appears to work great. Maybe a misconfiguration somewhere else.
Thank you!
-
AprilTags do not work in voxl-vision-px4Thank you, with the correct config file for the tag size, the detected tag positions and rotations in
voxl-test-vision-lib -alook quite accurate now!Unfortunately, this had no impact on the vio, it is still not detecting any April tag correct and I get lots of:
... WARNING, apriltag roll/pitch out of bounds WARNING, apriltag roll/pitch out of boundsBut maybe this is not AprilTag related, as vio is reporting very high velocities, sometimes without any AprilTag visible:
... T_body_wrt_local: 1738.20 882.29 453.10 RPY: 0.11 -0.09 -0.38 velocity: 39.93 42.38 3.43 VIO in failed state, restartingMost of the time, all values are increasing without any movement until it is in failed state.
One more thing that comes to my mind, when I stream from the tracking camera (e.g. via the
voxl_cam_rosnode) it always streams an overexposed image:

I have to set the exposure parameter down to 0.05 to get a "normal" image. Maybe your vio uses the overexposed images as well leading to strange results.
-
AprilTags do not work in voxl-vision-px4Hi,
I tried the inbuild AprilTag feature today but I can't get it to work and I have no idea what is going wrong. I strictly followed the instructions from the walkthrough video / text.The related config is very basic:
"en_apriltag_fixed_frame": true, "fixed_apriltags": [ { "tag_id": 1, "R_tag_to_fixed": [ [0, -1, 0], [1, 0, 0], [0, 0, 1] ], "T_tag_wrt_fixed": [0, 0, 0] } ], "en_transform_mavlink_pos_setpoints_from_fixed_frame": true, "en_fixed_frame_pipe": false,I set the
tag-sizeto0.16, as each square of the 8x8 tag grid is 2cm. A change of this parameter never had an effect to the detected tag position fromvoxl-vision-px4, which I find very strange.When I run
voxl-vision-px4 -pfor debug odometry in fixed frame I get lots of out of bounds warnings. A "first-detection" with a followed position "reset" of fixed frame does not happen.T_body_wrt_fixed: -0.00 0.00 -0.20 RPY: 0.00 0.00 -0.00 T_body_wrt_fixed: -0.00 0.00 -0.20 RPY: 0.00 0.00 0.00 WARNING, apriltag roll/pitch out of boundsSometimes, the tag is detected and the position is set to the fixed frame which is way off. This causes voxl-vision-px4 to diverge within a few seconds, even if the drone does not move at all. It crashes in the end of that process and resets the frame.
When I run
voxl-test-vision-lib -ait printsID: 1 hamming: 0 margin:89.98 XYZ: 0.67 0.06 1.85 RPY: -0.51 0.25 0.25 hz: 13.6which seams reasonable, even if there is a rotation offset (btw. This is in the frame of the camera right? The z-axis point 45 deg downwards away from the drone)
I recalibrated the tracking camera and reset the config multiple times. Any idea what else could be wrong here? Here is a picture of the setup, it is very similar to your walkthrough video, the voxl is about 1 meter away in y and z directions.
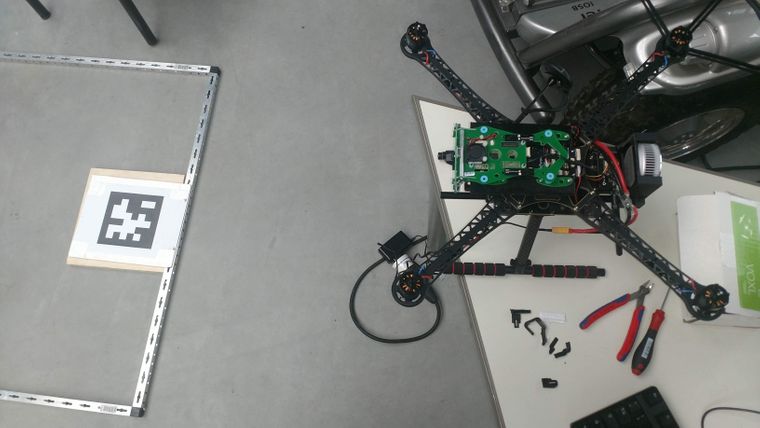
Any suggestions would be greatly appreciated!