@Eric-Katzfey I got it, thank you so much.
P
Pooyan
@Pooyan
Posts
-
Edit the follow-tag code for seeker drone -
Edit the follow-tag code for seeker droneHello all,
I want to edit the source code for the offboard mode (follow_tag). Can you please tell me where can I fine it inside the Voxl? and after editing how should I build it to be able to make it work?
I want to change the z distance between tag and the drone from 1.5m which is right now, to 0.3m.
Thank you,
-
save critical data@Eric-Katzfey Thank you so much for the information.
-
save critical data@Alex-Kushleyev @Moderator Great thank you. now I want to have an application to analyze data online and based on that turn on or off another application. I already have tried the voxl-cross-template but now I want to write my own application for that. Can you please provide me with some tips for that?
And to check the syntax errors in the application while writing and implementing it, may you please give me some hints?
I appreciate that so much.
-
save critical dataHello all,
I want to have the critical data (voxl-inspect-cpu, voxl-inspect-battery) of a flight saved during the flight time to use them later offline. I would appreciate it if you could tell me how I can do that by providing some details for help.
Best,
-
Best quality for the Mapping and Planning@Alex-Kushleyev Thank you for the information.
-
Best quality for the Mapping and Planning@Alex-Kushleyev Hello, thank you so much for your reply. Actually, I checked and the propellers can be seen in both stereo cameras and a little bit in the tracking cam.
for the camera in the mapper, I am using the default situation, which I am not sure in what part I should check to tell you, but in Volx-mapper.conf, I can see that tof is true. the rest of the parameters are as follows:
The other problem I can see in mapper is when I give it a point to go. It will just stop in the middle of the trajectory while there are no obstacles. As the stereo cam is used for VOA in DFS, might this be because of the propellers? I would appreciate it if there is anything I could do to prevent that.
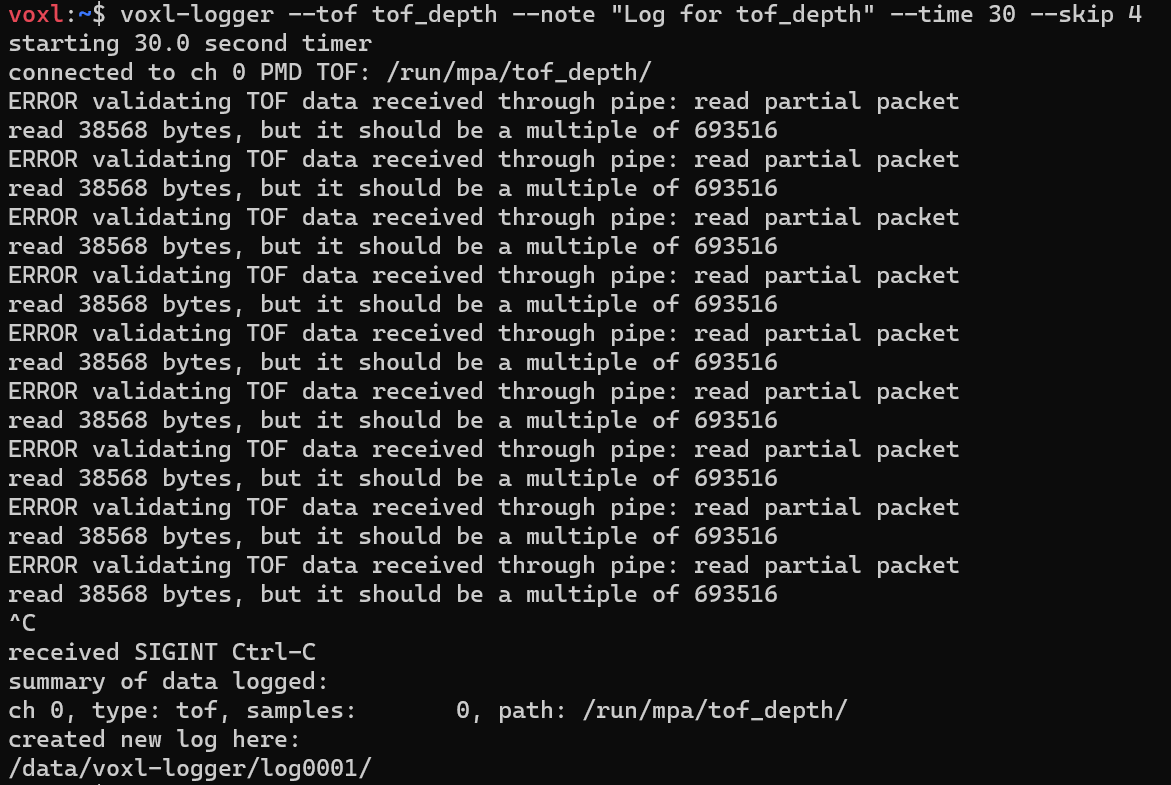
I would appreciate it if you could tell me how to get the output of the depth sensor and check it. I have tried this:
-
Best quality for the Mapping and Planning@Pooyan @Vinny @modaltb @Moderator @Zachary-Lowell-0 I would appreciate it if you could give me some hints on this:
-
Best quality for the Mapping and Planning -
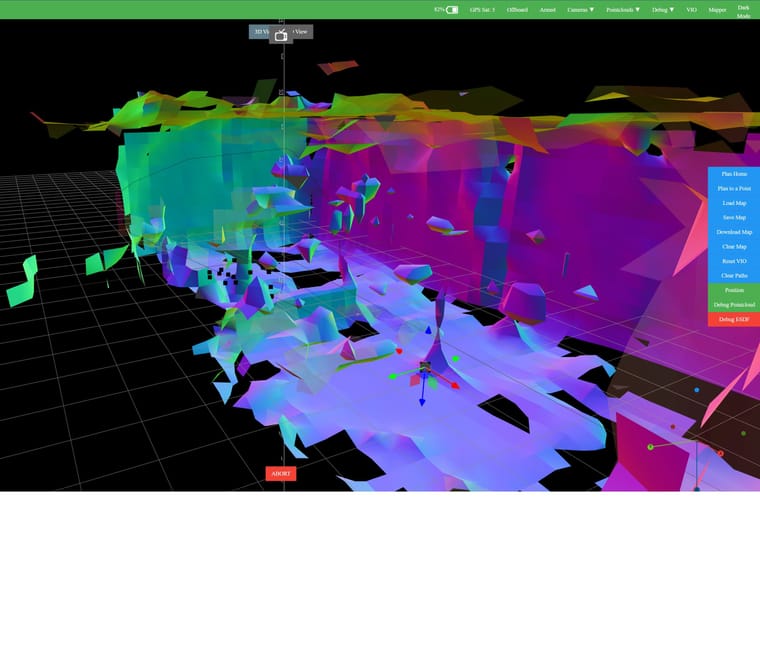
Best quality for the Mapping and Planning@Pooyan This is actually what I get after minutes of flight to get the map:
-
Best quality for the Mapping and Planning@Pooyan And something else is that sometimes when the drone is standing in a position, some bubble objects would appear exactly in front of it. Do you know how I can configure the parameters to get rid of those noises?
-
Best quality for the Mapping and PlanningHello all,
I am using the mapping and the planning with a seeker drone indore. I was wondering how I can get better results by configuring the parameters or if there is any other possible ways. I can see that I will encounter some obstacles like bubbles on the map which do not really exist, and when I turn the drone at the end of the environment to map the way back, many noises will happen.
Another question of mine is how can I make the planning and the trajectory lines thicker in the Voxl-web to be seen clearly.
I would appreciate it if you could give me some hints on these @tom.
-
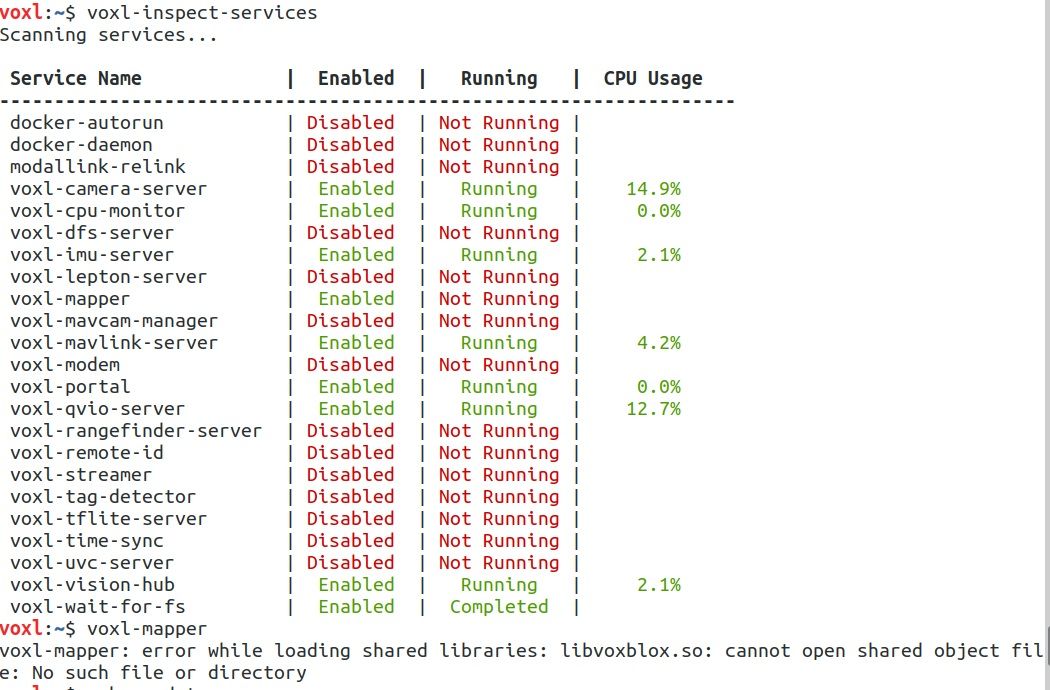
voxl-mapper/planner for a Seeker drone@tom So, if I just restart and then do "systemctl enable voxl-mapper", it will work. But if I run it on CMD with voxl-mapper, it will still show me the same error. If you have any comments I would appreciate it, otherwise it works in that way.
Thank you so much.
-
voxl-mapper/planner for a Seeker drone@tom Thank you so much. I didn't change anything and just put the commands you gave me. I am looking forward to hearing from you.
-
voxl-mapper/planner for a Seeker drone@tom Thank you so much. Now it seems that I have it and when I run it I get the following errors:
Do I need to upload the FC2? as I didnt do it yet.
-
voxl-mapper/planner for a Seeker drone@tom thank you for the command. I get this now:

-
voxl-mapper/planner for a Seeker drone@tom I have just flashed it again and before anything else I did opkg install voxl-mapper and I got this:
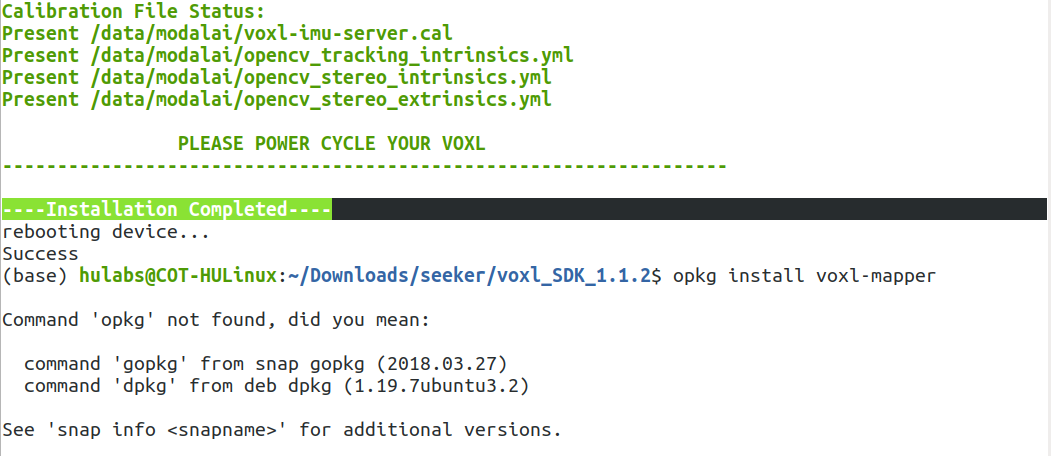
I did it when the seeker is connected to the internet and the adb cable is connected, and I got this:
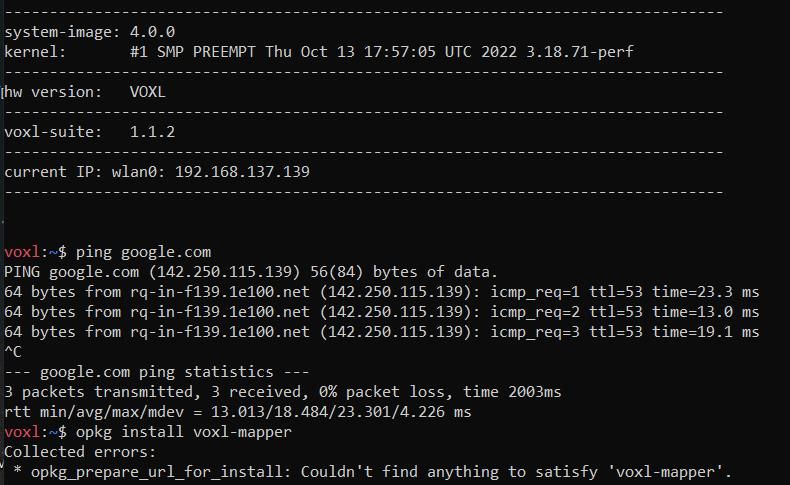
Still I didn't even install the FC2 through QGC or doing anything else.
-
voxl-mapper/planner for a Seeker drone@tom Again I changed the version to 1.1.2 and got the same issue about loading shared libraries: libvoxblox.so. So I want to explain more what I do in case you could help me better.
I have included the screenshot as well.
When I push the built mapper to voxl I get the following error as well. I wanted to show that to you as well:
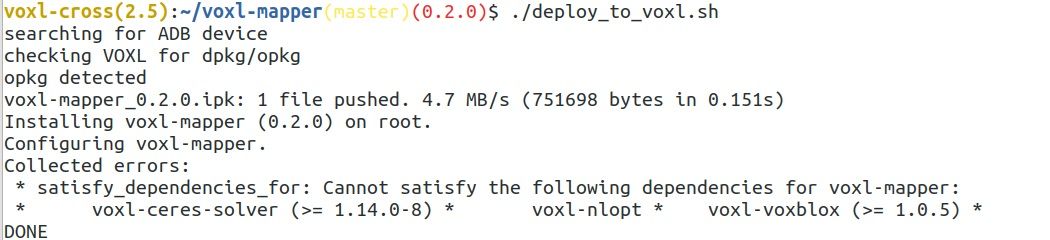
The codes I use to do that are as follow:
git clone https://gitlab.com/voxl-public/voxl-sdk/services/voxl-mapper.git
./install_build_deps.sh APQ8096 dev
./build.sh apq8096
./make_package.sh ipk
./deploy_to_voxl.shI would appreciate it if you could give me any hints on this.
-
voxl-mapper/planner for a Seeker drone@tom Hello again,
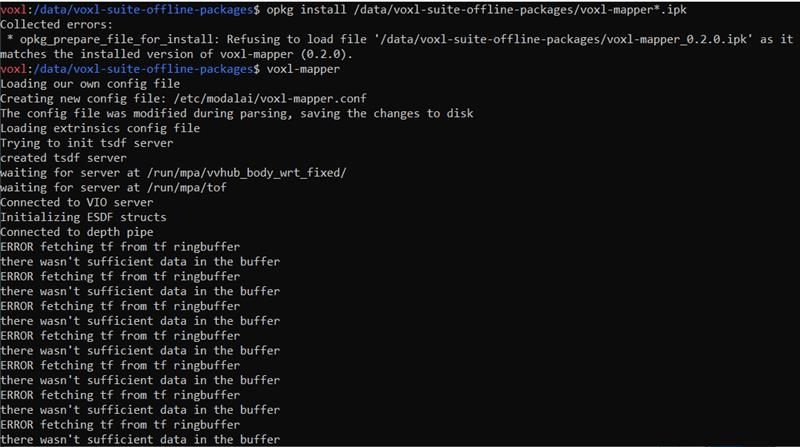
The SDK was updated to 1.2.0 and it was because of putting the configure-opkg on dev as it was said in the GitLab voxl-mapper link. I went through every steps in the following link again. Do you have any idea about what I can do?
https://gitlab.com/voxl-public/voxl-sdk/services/voxl-mapper
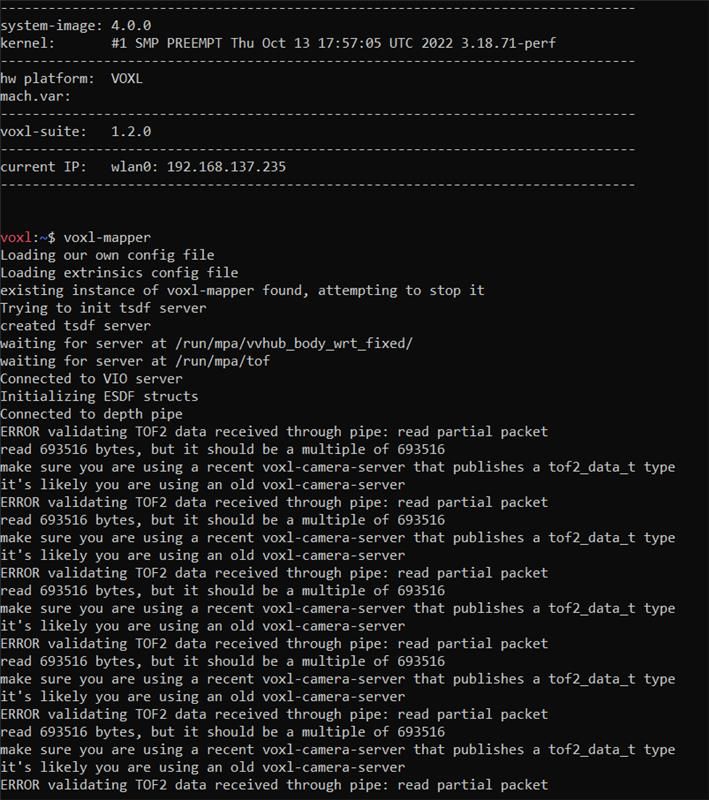
as you can see, when I run the "voxl-mapper", I get the following errors and it keeps repeating.Thank you so much for your help.
-
voxl-mapper/planner for a Seeker drone@Pooyan there was an internet connection issue and after that I used "opkg update && opkg upgrade", and then "opkg install voxl-portal voxl-mapper " for installing mapper again and now this problem is solved.