VOXL ESC FPV queries
-
@Alex-Kushleyev I currently use, VOXL2 USB 3.0 Expansion Adapter connected to VOXL2. From the UART7 port of the Expansion Adapter I have connected to 6-PIN Telemetry1 Port in Flight Core V2.
My connection is similar to this,
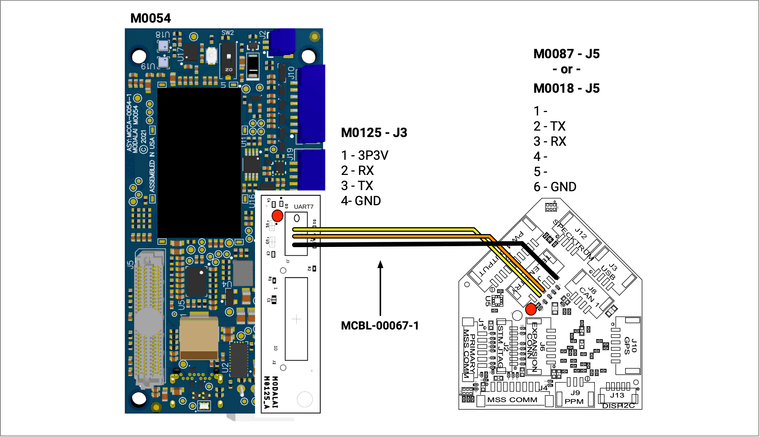
As you mentioned earlier, I'm establishing connection through port
/dev/ttyHS1. When I run thecatcommand to read the messages from this port, I get garbled data as below,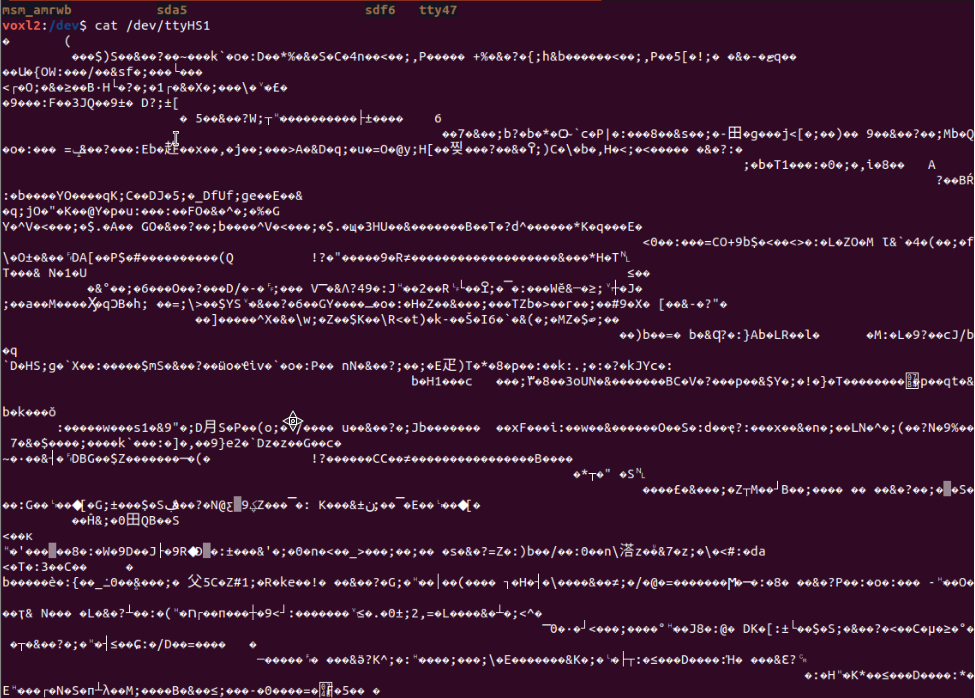 .
.I'm not exactly clear when you mean if I have tried connecting to VOXL2 from QGC and access the Flight Core V2. Few things I have tried is,
-
Connecting to FlightCore V2 by connecting to Wifi of VOXL2. I also have a Wifi setup on VOXL2, which also acts as my Telemetry line. From QGC I connect to this local network to access FC data and PX4 parameters on Flight Core V2.
-
I have tried and tested few mavlink message commads which communicate with PX4 directly for C2C.
-
-
@tom As per your response on shifting to
voxl-inspect-mavlink mavlink_offboard, I see that even in mavlink server documentation from ModalAI that service pipeline is not listed. Is it that something that has to be explicitly be enabled somewhere?
Even as per the documentation, I dont see this service pipeline listed.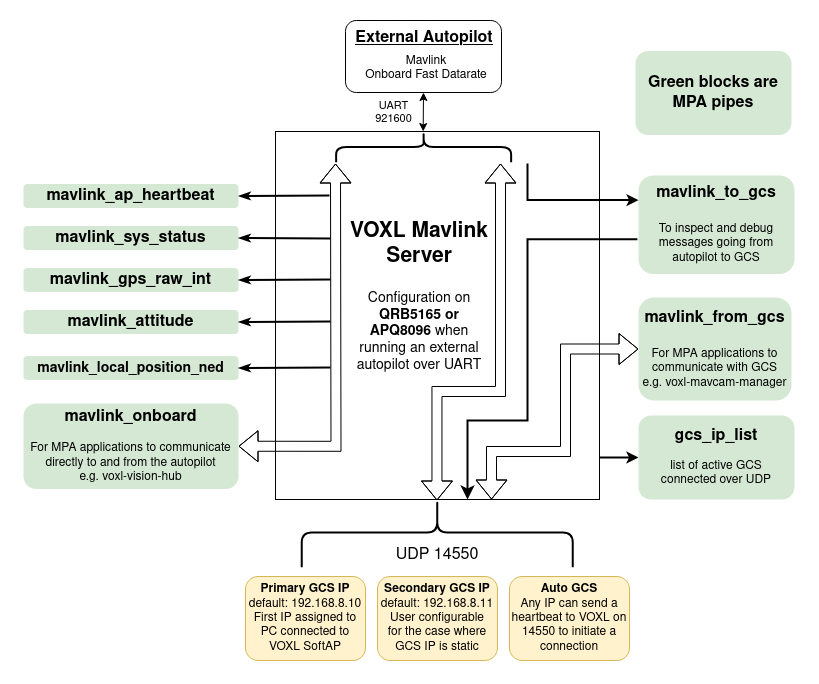
-
@Jetson-Nano I could have the naming wrong. If you inspect
mavlink_onboardwhat kind of data do you see? -
@tom This is the output I get,

-
@Jetson-Nano Since you don't have voxl-px4 running I think that data is likely coming from your external flight controller
-
@tom yes, the message is coming from external flight controller, Flight core v2. Now can you share how to double check if the RC message is set up to forward to voxl-mavlink-server from Flight Core (if not, how to enable it) and how to actually read that message?
-
@Jetson-Nano Probably should also look at the pipe for messages from the flight controller to the GCS (Labeled mavlink_to_gcs in the above diagram but you'll have to double check that name). Generally the flight controller is configured with two mavlink streams. One is the onboard stream that has high rate messages and is intended for local use (e.g. on VOXL or VOXL 2) and the other is more the default settings for communication with a GCS. You can configure what each of these streams contain in PX4. You can add streams, change stream rates, etc. all via PX4 configuration. Please refer to the PX4 documentation for details on how to do this.
-
Hi @Eric-Katzfey, I was thinking another approach, where we can use pymavlink to get the RC_channel data. Any inputs to the mentioned approach, is it feasible?
-
@Jetson-Nano Yes, that should work. You should be able to send heartbeats from a Python script using pymavlink and connect to the flight controller via voxl-mavlink-server. Then you should start receiving all the normal messages sent out by the flight controller to the GCS which should include the RC channels message.
-
This post is deleted! -
@Alex-Kushleyev can you check the above mentioned approach
-
@Jetson-Nano , I am sorry, I don't have this hardware set up right now, so I can't actually test what you are trying to do. I will check with the team regarding who can test it.
Alex