m500 VOXL Flight sdk update to v1.1.x
-
I just updated my m500 voxl flight sdk to v1.1.x. In the documentation it says to update the flight core separately. But the documentation redirects it to this webpage https://docs.modalai.com/flight-core-v2-firmware/ which only has instructions of upgrading flight core v2. I am a bit confused here what is the difference between flight core v2 and voxl flight and do I need to upgrade the flight core of voxl flight after the sdk upgrade?
-
@Darshit-Desai You are correct, you should use Flight Core v1 instructions for the Flight Core portion of VOXL Flight.
-
@Moderator Is the update procedure the same as this one for v1.14 firmware?
https://docs.modalai.com/update-flight-core-firmware/#update-procedure
Also since I dont have the desired cable if I want to fallback to v0.9.5 I don't need to change anything in the firmware right?
Also when I try to go back v0.9.5 sdk and configure my qvio it always shows this error.
/ # voxl-configure-qvio Starting Wizard Do you want to reset the config file to factory defaults? 1) yes 2) no #? 1 wiping old config file loading config file Creating new config file: /etc/modalai/voxl-qvio-server.conf Do you want to enable the voxl-qvio-server service to allow visual inertial odometry? 1) yes 2) no #? 1 Now we are going to do a preliminary configuration of /etc/modalai/voxl-qvio-server.conf Which config voxl-qvio-server use? imu0_tracking for VOXL Flight all-in-one board, M500 imu1_tracking for VOXL1 and VOXL-CAM, Seeker V1 imu_px4_tracking for RB5 Flight 5G imu_apps_tracking for VOXL2, Sentinel imu_apps_stereo_lower for Starling V2 stereo version 1) imu0_tracking 3) imu_px4_tracking 5) imu_apps_stereo_lower 2) imu1_tracking 4) imu_apps_tracking #? 1 enabling voxl-qvio-server systemd service starting voxl-qvio-server systemd service Done configuring voxl-qvio-server / # voxl-inspect-qvio waiting for server dt(ms) | T_imu_wrt_vio (m) |Roll Pitch Yaw (deg)|features|quality| state| error_codes | 30.2 | 0.00 0.00 0.00| 0.0 -0.0 0.0| 0 | -1% | FAIL | IMU_MISSING STALLED ^C received SIGINT Ctrl-C closing and exiting / # -
@Darshit-Desai your firmware should match what was used in the SDK, they are paired together
why would you go to SDK 0.9.5? It is really old and no longer supported
-
@Moderator I don't have the usb-jst connector for the firmware update and I think 0.95 that was the original factory sdk version
-
@Moderator said in m500 VOXL Flight sdk update to v1.1.x:
your firmware should match what was used in the SDK, they are paired together
What firmware matches the voxl-1 sdk 1.1.2 version
-
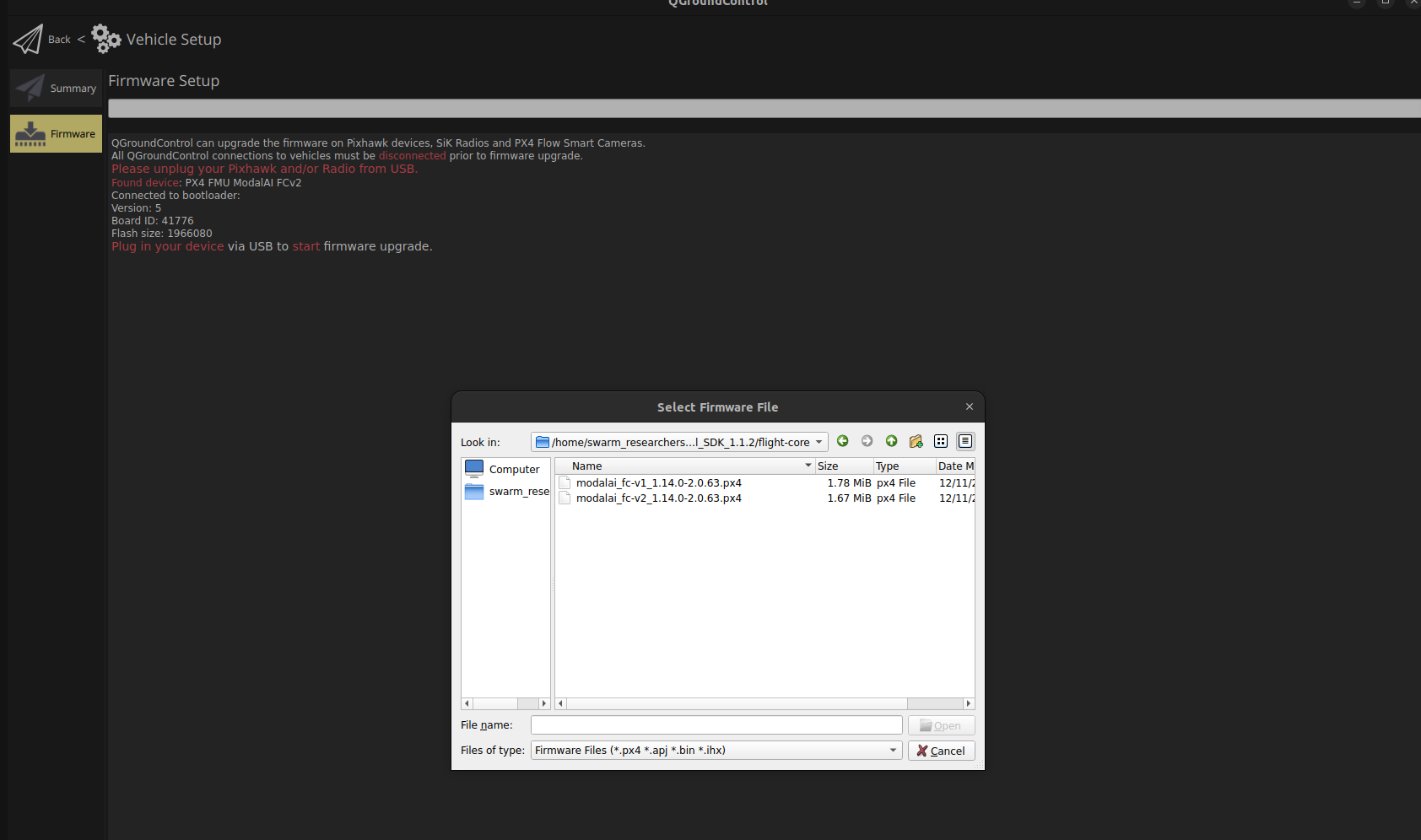
@Moderator I have got the cable for flight core update, I upgraded the sdk to 1.1.2 again but then I am following the instructions as shown in the below but nothing shows up in the firmware tab
https://docs.modalai.com/update-flight-core-firmware/#update-using-qgroundcontrol---mainline-builds
-
@Darshit-Desai The .px4 file is in the SDK release zip:
for FCv1:
voxl_SDK_1.1.2/flight-core/modalai_fc-v1_1.14.0-2.0.63.px4Follow the instructions here (ModalAI Build) with the above .px4 file:
https://docs.modalai.com/update-flight-core-firmware/#update-using-qgroundcontrol---modalai-build
-
@tom Yes but in the firmware page nothing shows up in QGC
@tom said in m500 VOXL Flight sdk update to v1.1.x:
https://docs.modalai.com/update-flight-core-firmware/#update-using-qgroundcontrol---modalai-build
-
@Darshit-Desai Did you unplug power and re-connect power while keeping USB attached?
-
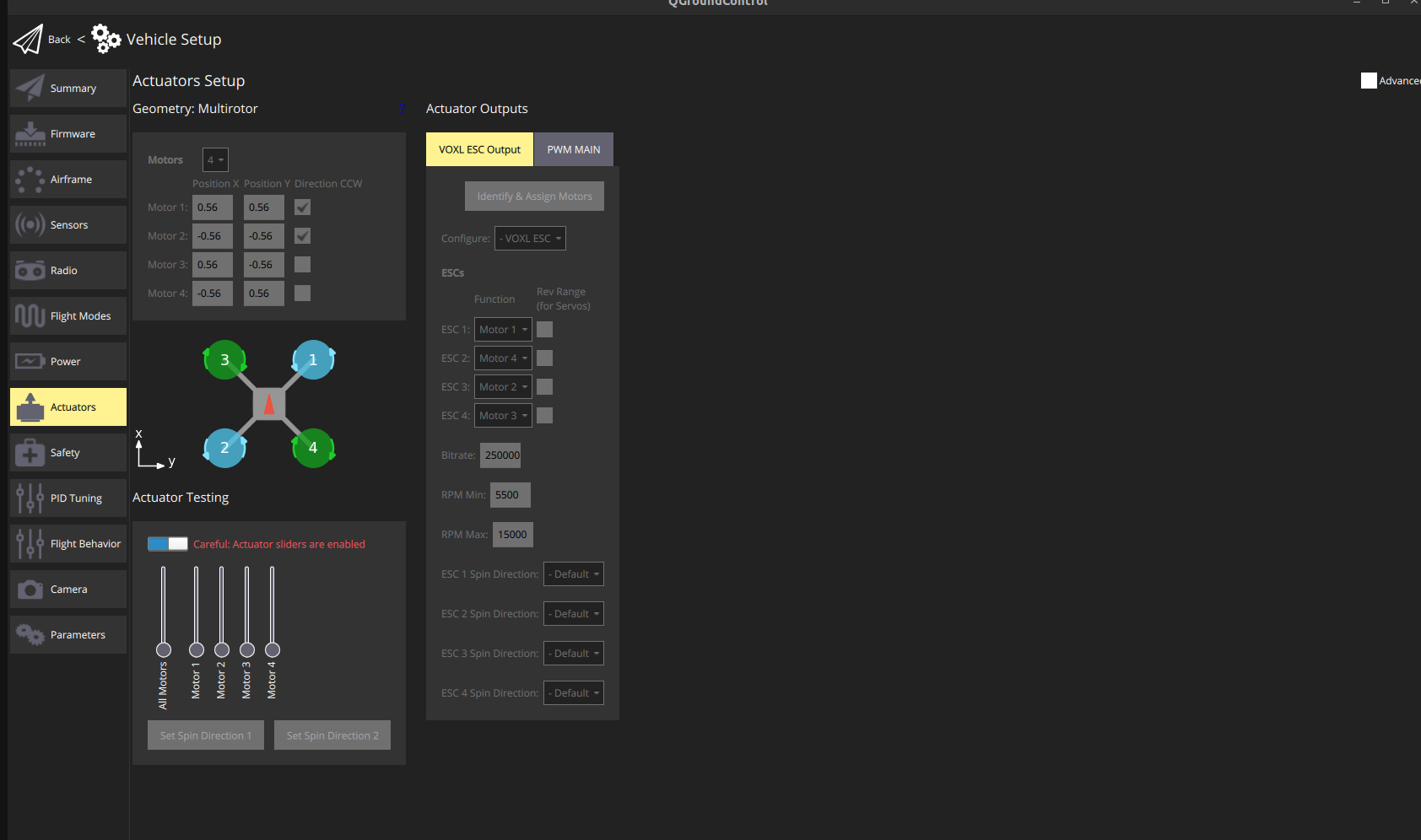
@tom I was able to finish the upgrade, but in QGC it shows something about actuators, when I open it opens the esc calibration related page, Do I need to calibrate esc again?
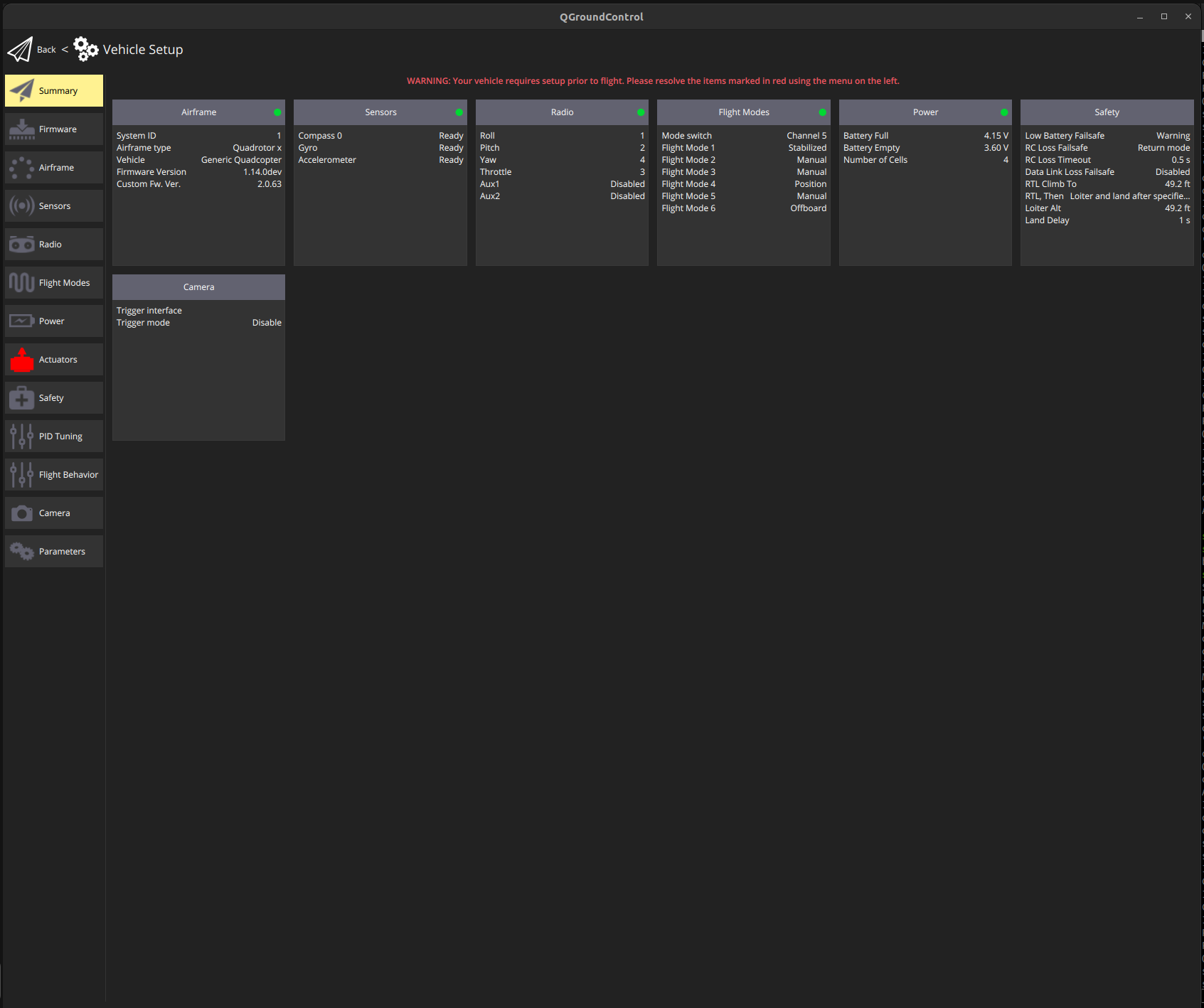
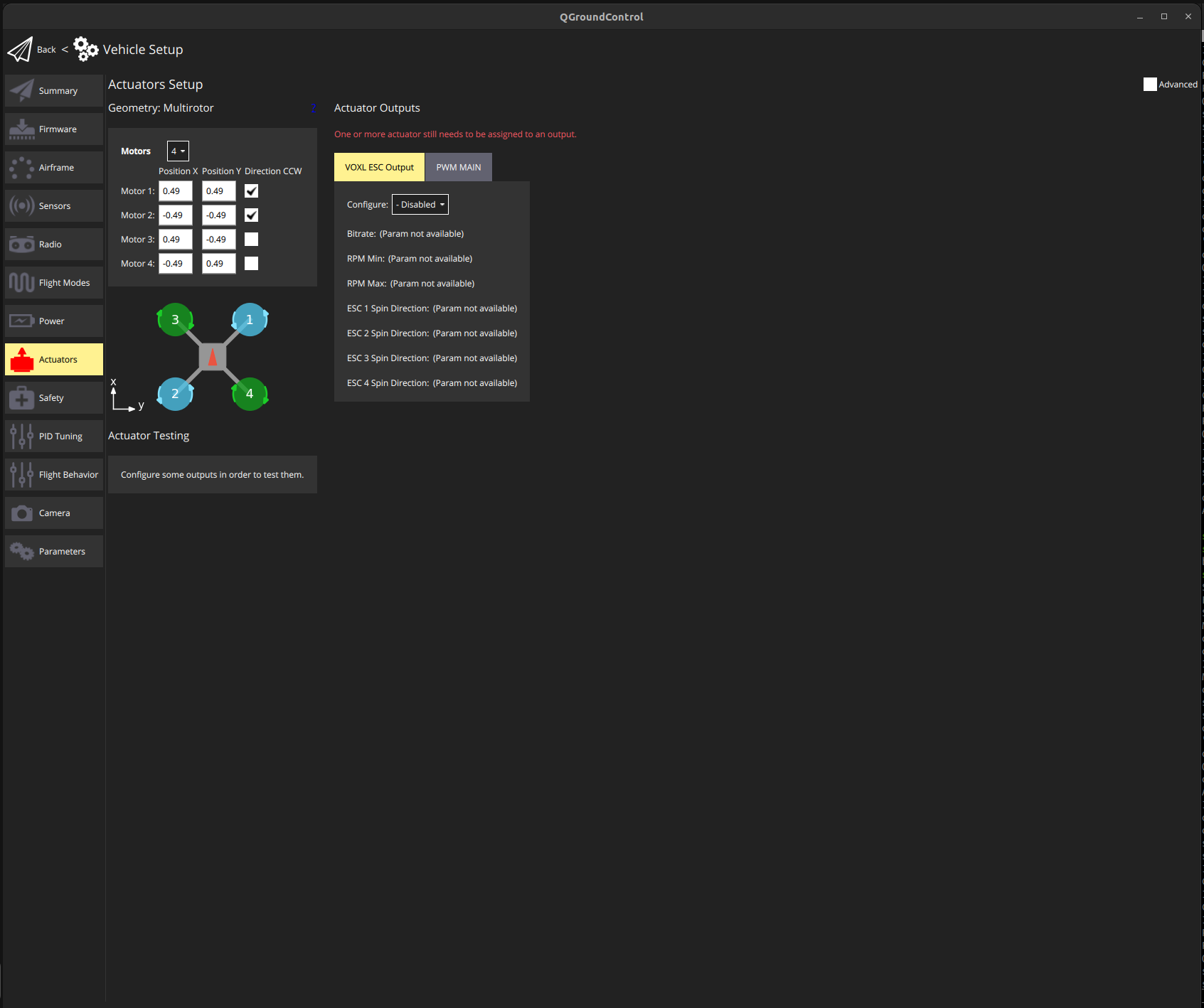
Edit: I found this page (https://docs.modalai.com/modal-esc-px4-user-guide/) on ESCs and added the parameters accordingly, the only ones I don't know are the min and max RPM, I am using the voxl 1 m500 with holybro 2216-920kv motors. Also I don't think the motors rotate when I try to using the sliders
-
@Darshit-Desai
Can you try loading the FCv1 m500 params from here: https://gitlab.com/voxl-public/voxl-sdk/utilities/voxl-px4-params/-/blob/master/params/v1.14/platforms/M500_FCV1.params -
@tom V1 or V2? Because when I flash firmware it detects v2
-
@Darshit-Desai Sorry yes v2 https://gitlab.com/voxl-public/voxl-sdk/utilities/voxl-px4-params/-/blob/master/params/v1.14/platforms/M500_FCV2.params
-
@tom It's hard for me to follow which hardware you have, so whichever one you have v1 or v2
-
@tom Yes I am also not sure what came with m500 I recently bought because the earlier ones had v1
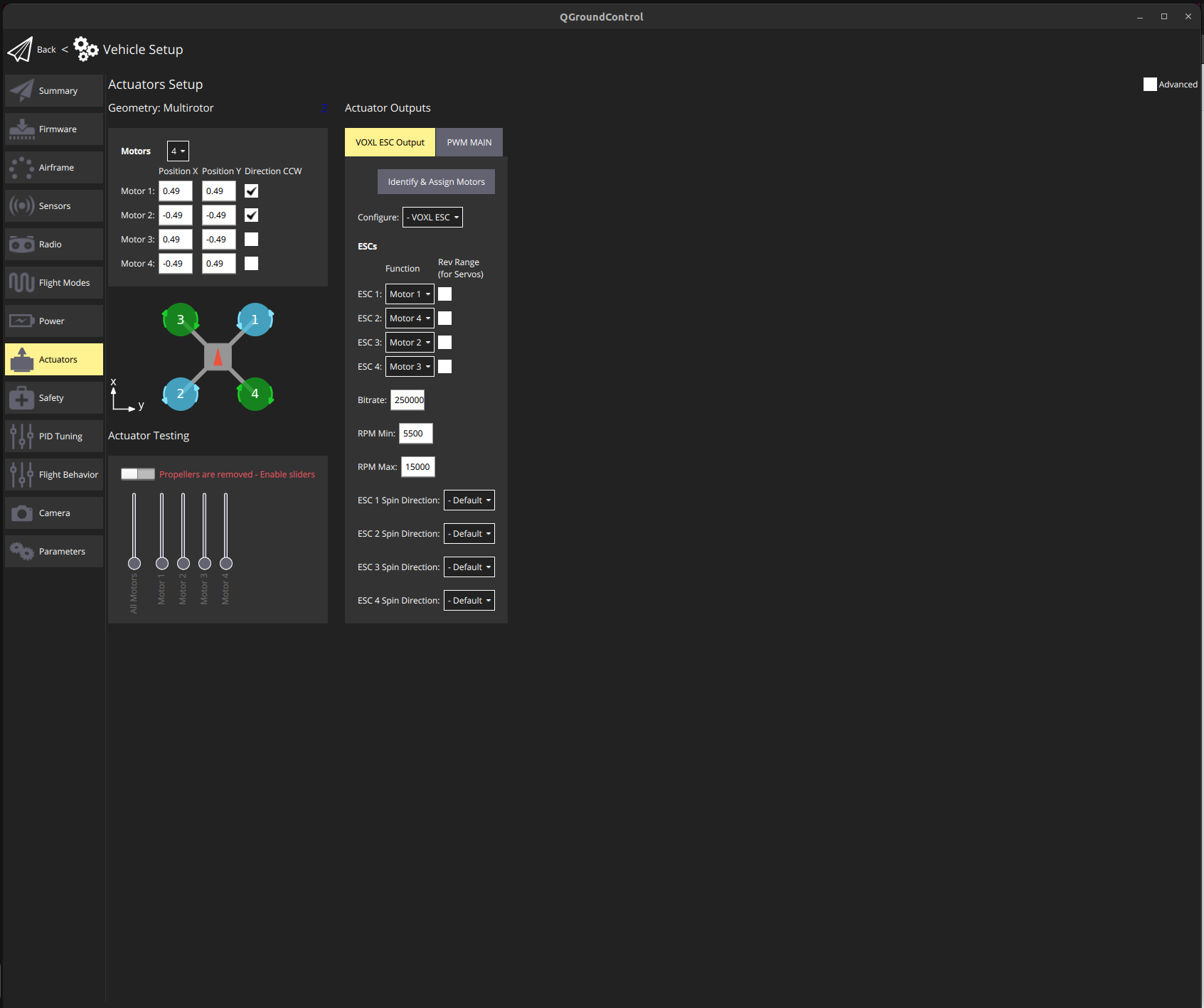
Edit: The motor issue was resolved with this and I can spin the motors, I will have a flight with the propellers and confirm it
-
@tom On the next reboot it's showing esc failure in the logs
[13:38:12.651] Info: Kill-switch engaged
[13:38:13.768] Info: Kill-switch disengaged
[13:39:33.963] Info: Armed by RC
[13:39:34.096] Info: logging: opening log file sess114/log100.ulg
[13:39:34.296] Critical: Failsafe activated, triggering disarm
ESC failure
[13:39:34.296] Info: Disarmed by failsafe
[13:39:36.780] Info: Armed by RC
[13:39:36.781] Info: logging: opening log file sess114/log101.ulg
[13:39:37.131] Critical: Failsafe activated, triggering disarm
[13:39:37.131] Info: Disarmed by failsafe
[13:39:39.424] Info: Armed by RC
[13:39:39.465] Info: logging: opening log file sess114/log102.ulg
[13:39:39.787] Critical: Failsafe activated, triggering disarm
[13:39:39.787] Info: Disarmed by failsafeAnd the motors try to spin up for a few seconds when arming and then instantly stop
When I move this sliders now the motors rotate but when I try to arm the drone using RC it shows the ESC failure error
-
D Darshit Desai referenced this topic on
-
@Darshit-Desai If you upload the px4 log someone on our team can analyze it
-
@tom By px4 log you mean the one mentioned in the post earlier, How can I access the log file which is mentioned here in the QGC log?
@Darshit-Desai said in m500 VOXL Flight sdk update to v1.1.x:
[13:38:12.651] Info: Kill-switch engaged
[13:38:13.768] Info: Kill-switch disengaged
[13:39:33.963] Info: Armed by RC
[13:39:34.096] Info: logging: opening log file sess114/log100.ulg
[13:39:34.296] Critical: Failsafe activated, triggering disarm
ESC failure
[13:39:34.296] Info: Disarmed by failsafe
[13:39:36.780] Info: Armed by RC
[13:39:36.781] Info: logging: opening log file sess114/log101.ulg
[13:39:37.131] Critical: Failsafe activated, triggering disarm
[13:39:37.131] Info: Disarmed by failsafe
[13:39:39.424] Info: Armed by RC
[13:39:39.465] Info: logging: opening log file sess114/log102.ulg
[13:39:39.787] Critical: Failsafe activated, triggering disarm
[13:39:39.787] Info: Disarmed by failsafe -
@Darshit-Desai The logs can be downloaded through QGroundControl: https://docs.px4.io/v1.11/en/getting_started/flight_reporting.html#downloading-logs-from-the-flight-controller