Supporting power monitor to see battery status
-
Hi,
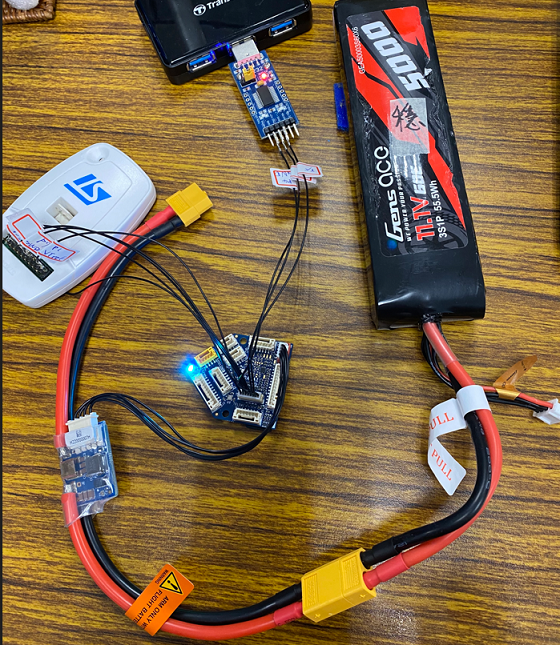
I've linked the power monitor to FCv2, but I'm unable to view the battery status from either GCS or voxlpm. Your assistance in resolving this matter would be greatly appreciated. Thank you.
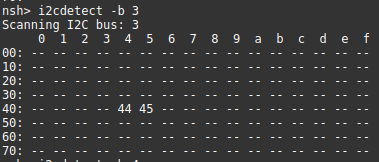
[boot] Rev 0x0 : Ver 0x3 V2003000 [boot] Fault Log info File No 4 Length 3177 flags:0x01 state:1 [boot] Fault Log is Armed ERROR [PX4_MTD] failed to initialize mtd driver ERROR [PX4_MTD] mtd fail[hardfault_log] Fault Log is Armed ure: -5 bus 2 address 0 class 1 nsh: sysinit: fopen failed: No such file or directory HW arch: MODALAI_FC_V2 HW type: V2003000 HW version: 0x003 HW revision: 0x000 PX4 git-hash: 996e85e9360801dd9ec11b7149a524e38231dcc6 PX4 version: 1.14.0 0 (17694720) Vendor version: 2.0.64 0 (33570816) OS: NuttX OS version: Release 11.0.0 (184549631) OS git-hash: 3f77354c0dc88793a47ff3b57595195ab45f7ba9 Build datetime: Jan 3 2024 15:59:58 Build uri: localhost Build variant: default Toolchain: GNU GCC, 9.3.1 20200408 (release) PX4GUID: 0006000000003333363031315105003a001c MCU: STM32H7[4|5]xxx, rev. V INFO [param] selected parameter default file /fs/microsd/params INFO [param] importing from '/fs/microsd/params' INFO [parameters] BSON document size 1487 bytes, decoded 1487 bytes (INT32:29, FLOAT:44) INFO [param] selected parameter backup file /fs/microsd/parameters_backup.bson Board architecture defaults: /etc/init.d/rc.board_arch_defaults Board defaults: /etc/init.d/rc.board_defaults Loading airframe: /etc/init.d/airframes/4001_quad_x nsh: tone_alarm: command not found INFO [dataman] data manager file '/fs/microsd/dataman' size is 62560 bytes Board sensors: /etc/init.d/rc.board_sensors INFO [voxlpm] Failed to init voxlpm type: 0 on bus: 3, but will try again periodically. voxlpm #0 on I2C bus 3 (external) address 0x44 WARN [SPI_I2C] Already running on bus 3 WARN [SPI_I2C] voxlpm: no instance started (no device on bus?) icm42688p #0 on SPI bus 1 rotation 12 icm42688p #1 on SPI bus 2 rotation 12 WARN [SPI_I2C] icp201xx: no instance started (no device on bus?) nsh: icm20948_i2c_passthrough: command not found nsh: battery_status: command not found ekf2 [542:237] Starting MAVLink on /dev/ttyS6 INFO [mavlink] mode: Onboard, data rate: 46080 B/s on /dev/ttyS6 @ 921600B Addons script: /fs/microsd/etc/extras.txt nsh: BMP388: command not found INFO [logger] logger started (mode=all) INFO [uavcan] Node ID 1, bitrate 1000000 NuttShell (NSH) NuttX-11.0.0 nsh> WARN [health_and_arming_checks] Preflight Fail: barometer 0 missing WARN [health_and_arming_checks] Preflight Fail: Crash dumps present on SD, vehicle needs service nsh> ver all HW arch: MODALAI_FC_V2 HW type: V2003000 HW version: 0x003 HW revision: 0x000 PX4 git-hash: 996e85e9360801dd9ec11b7149a524e38231dcc6 PX4 version: 1.14.0 0 (17694720) Vendor version: 2.0.64 0 (33570816) OS: NuttX OS version: Release 11.0.0 (184549631) OS git-hash: 3f77354c0dc88793a47ff3b57595195ab45f7ba9 Build datetime: Jan 3 2024 15:59:58 Build uri: localhost Build variant: default Toolchain: GNU GCC, 9.3.1 20200408 (release) PX4GUID: 0006000000003333363031315105003a001c MCU: STM32H7[4|5]xxx, rev. V nsh> nsh> voxlpm status voxlpm: sample: 0 events, 0us elapsed, 0.00us avg, min 0us max 0us 0.000us rms - type: BATT - voltage: 0.0000 VDC - current: 0.0000 ADC - shunt: 0.0000 mV, 0.0000 mA - rsense: 0.000500 ohm, cal: 0 - meas interval: 100000 us nsh> nsh> i2cdetect -b 3 Scanning I2C bus: 3 0 1 2 3 4 5 6 7 8 9 a b c d e f 00: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- 10: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- 20: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- 30: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- 40: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- 50: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- 60: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- 70: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --@Vinny, I've conducted measurements on J13 pins, specifically p3 and p4. While p4 (I2C SDA) registers a stable 5V when the voxlpm is operational, I've observed that p3 (I2C SCL) shows no voltage at all. I suspect this discrepancy might be the root cause of my inability to retrieve battery information. Could you please assist in verifying and addressing this issue? Thank you.
-
@Vinny, I've conducted measurements on J13 pins, specifically p3 and p4. While p4 (I2C SDA) registers a stable 5V when the voxlpm is operational, I've observed that p3 (I2C SCL) shows no voltage at all. I suspect this discrepancy might be the root cause of my inability to retrieve battery information. Could you please assist in verifying and addressing this issue? Thank you.
Hi @Will
Few questions then (and good sleuthing here):- If you disconnect the power module from the FCv2 board, do you observe both I2C_SDA and I2C_SCL HIGH or LOW on the power module? The 5V pullups are located at the power module, and not the FCv2 side
- When plugged in to the FCv2, does anything change? (i..e: is SCL HIGH on the power module, but when you insert to J13 it goes low?)
- Can you possibly replace your MCBL-00062 and retry?
https://docs.modalai.com/cable-datasheets/#mcbl-00062
The Molex side is notorious for loosing connectivity at the pin contacts in high-use applications where folks pull on the wires and not the connector (We have a standing rule at HQ to replace any power cable after every few months).
We'll take it from there pending your results.
Thanks! -
Tagging along here. I observed similar issue with the voxlpm driver on Flight core v2.
Personally I have been working on a voxl1 + flight core v2 (I have 2 set of this). I am using the older v2 power module https://docs.modalai.com/power-module-v2-datasheet/ connected to a standard 4s LiPo battery.
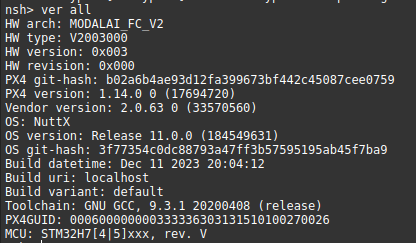
The version of my flight core shown below.
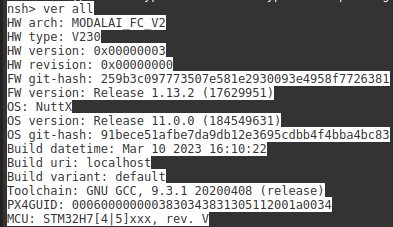 .
.I am seeing that one of the flight-core (rarely use this, mostly as backup) has output by voxlpm as shown below,
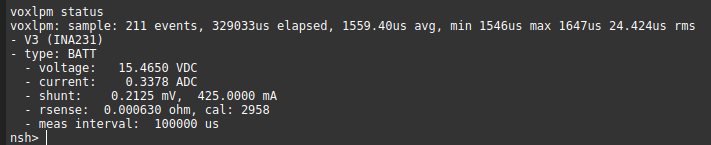
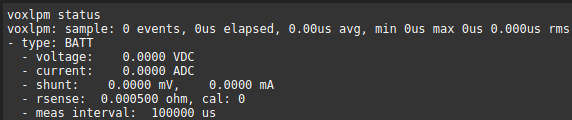
while my other flight core (mainly working on this) is not giving any output (shown below)
Both flight core able to detect the i2c port at bus 3 address 44 and 45.
https://github.com/PX4/PX4-Autopilot/blob/main/src/drivers/power_monitor/voxlpm/voxlpm.hpp
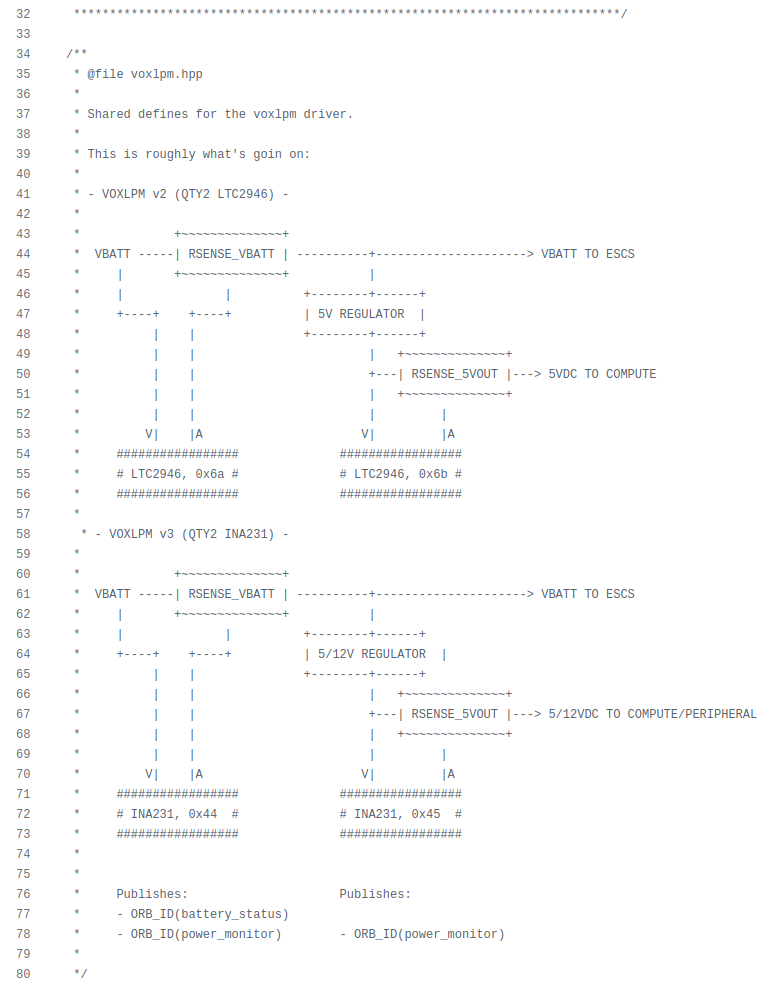
I assume the firmware on my board (1.13.2) is using the voxlpmv3 and sensing on the address 0x44 as the default voxlpm is sensing at the RSENSE_VBATT.
Any idea what might be the case? Is there a way to observe the uORB id for battery_status or monitor the process when voxlpm start at boot?
What i have tried.
- Use same power module connector.
- Load the same px4 parameter.
- Updating to the latest sdk 1.12 and px4 1.14 firmware http://voxl-packages.modalai.com/dists/fc-v2/sdk-1.1/modalai_fc-v2_1.14.0-2.0.63.px4
-
Tagging along here. I observed similar issue with the voxlpm driver on Flight core v2.
Personally I have been working on a voxl1 + flight core v2 (I have 2 set of this). I am using the older v2 power module https://docs.modalai.com/power-module-v2-datasheet/ connected to a standard 4s LiPo battery.
The version of my flight core shown below.
.I am seeing that one of the flight-core (rarely use this, mostly as backup) has output by voxlpm as shown below,
while my other flight core (mainly working on this) is not giving any output (shown below)
Both flight core able to detect the i2c port at bus 3 address 44 and 45.
https://github.com/PX4/PX4-Autopilot/blob/main/src/drivers/power_monitor/voxlpm/voxlpm.hpp
I assume the firmware on my board (1.13.2) is using the voxlpmv3 and sensing on the address 0x44 as the default voxlpm is sensing at the RSENSE_VBATT.
Any idea what might be the case? Is there a way to observe the uORB id for battery_status or monitor the process when voxlpm start at boot?
What i have tried.
- Use same power module connector.
- Load the same px4 parameter.
- Updating to the latest sdk 1.12 and px4 1.14 firmware http://voxl-packages.modalai.com/dists/fc-v2/sdk-1.1/modalai_fc-v2_1.14.0-2.0.63.px4
-
Tagging along here. I observed similar issue with the voxlpm driver on Flight core v2.
Personally I have been working on a voxl1 + flight core v2 (I have 2 set of this). I am using the older v2 power module https://docs.modalai.com/power-module-v2-datasheet/ connected to a standard 4s LiPo battery.
The version of my flight core shown below.
.I am seeing that one of the flight-core (rarely use this, mostly as backup) has output by voxlpm as shown below,
while my other flight core (mainly working on this) is not giving any output (shown below)
Both flight core able to detect the i2c port at bus 3 address 44 and 45.
https://github.com/PX4/PX4-Autopilot/blob/main/src/drivers/power_monitor/voxlpm/voxlpm.hpp
I assume the firmware on my board (1.13.2) is using the voxlpmv3 and sensing on the address 0x44 as the default voxlpm is sensing at the RSENSE_VBATT.
Any idea what might be the case? Is there a way to observe the uORB id for battery_status or monitor the process when voxlpm start at boot?
What i have tried.
- Use same power module connector.
- Load the same px4 parameter.
- Updating to the latest sdk 1.12 and px4 1.14 firmware http://voxl-packages.modalai.com/dists/fc-v2/sdk-1.1/modalai_fc-v2_1.14.0-2.0.63.px4
@skl1g14 You can use the listener command to monitor topic data. For example
listener battery_status. -
Tagging along here. I observed similar issue with the voxlpm driver on Flight core v2.
Personally I have been working on a voxl1 + flight core v2 (I have 2 set of this). I am using the older v2 power module https://docs.modalai.com/power-module-v2-datasheet/ connected to a standard 4s LiPo battery.
The version of my flight core shown below.
.I am seeing that one of the flight-core (rarely use this, mostly as backup) has output by voxlpm as shown below,
while my other flight core (mainly working on this) is not giving any output (shown below)
Both flight core able to detect the i2c port at bus 3 address 44 and 45.
https://github.com/PX4/PX4-Autopilot/blob/main/src/drivers/power_monitor/voxlpm/voxlpm.hpp
I assume the firmware on my board (1.13.2) is using the voxlpmv3 and sensing on the address 0x44 as the default voxlpm is sensing at the RSENSE_VBATT.
Any idea what might be the case? Is there a way to observe the uORB id for battery_status or monitor the process when voxlpm start at boot?
What i have tried.
- Use same power module connector.
- Load the same px4 parameter.
- Updating to the latest sdk 1.12 and px4 1.14 firmware http://voxl-packages.modalai.com/dists/fc-v2/sdk-1.1/modalai_fc-v2_1.14.0-2.0.63.px4
@skl1g14 You can also use the
dmesgcommand to look at all of the past messages since boot -
Hi @skl1g14
I've notified our team to look into this for you. Your request is beyond my support ability")
Anything HW related, feel free to tag me.Thanks!
@skl1g14 , based on your
voxlpm status, you actually have V3 power adapter, because it saysV3 (INA231). The px4 driver should do a probe and find either V2 or V3 power adapter based on the i2c addresses : https://github.com/PX4/PX4-Autopilot/blob/main/src/drivers/power_monitor/voxlpm/voxlpm.cpp#L120If you can use
i2cdetectto detect i2c addresses44and45this also confirms V3 power adapter.If your second flight core is not reading battery voltage, it seems that it failed to detect the power adapter. Is it possible that you are using old version of PX4 that did not have the support for V3 power adapter?
You can try to add some print statements into
init()andprobe()functions here : https://github.com/PX4/PX4-Autopilot/blob/main/src/drivers/power_monitor/voxlpm/voxlpm.cpp#L68@Will , if you cannot see any I2C devices using
i2c_detect -b 3that is not very good. Maybe try again after disablingvoxlpmdriver, just to make sure there is no conflict between the driver and thei2c_detecttest. I would also recommend using an oscilloscope (if you have one available) to check if there is i2c communication attempts when you do runi2c_detect -
@skl1g14 , based on your
voxlpm status, you actually have V3 power adapter, because it saysV3 (INA231). The px4 driver should do a probe and find either V2 or V3 power adapter based on the i2c addresses : https://github.com/PX4/PX4-Autopilot/blob/main/src/drivers/power_monitor/voxlpm/voxlpm.cpp#L120If you can use
i2cdetectto detect i2c addresses44and45this also confirms V3 power adapter.If your second flight core is not reading battery voltage, it seems that it failed to detect the power adapter. Is it possible that you are using old version of PX4 that did not have the support for V3 power adapter?
You can try to add some print statements into
init()andprobe()functions here : https://github.com/PX4/PX4-Autopilot/blob/main/src/drivers/power_monitor/voxlpm/voxlpm.cpp#L68@Will , if you cannot see any I2C devices using
i2c_detect -b 3that is not very good. Maybe try again after disablingvoxlpmdriver, just to make sure there is no conflict between the driver and thei2c_detecttest. I would also recommend using an oscilloscope (if you have one available) to check if there is i2c communication attempts when you do runi2c_detectHi @Alex-Kushleyev,
Updated the PX4 firmware to 1.14
Adding the following two parameters to the list and load parameter from file seems to fix it for me? I could not find these 2 parameters in QGC initally. I am using the latest version of QGC (v4.30).
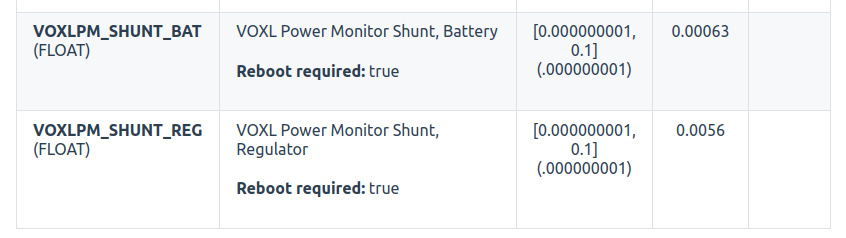
I tried to remove these 2 parameters but I could not reproduce my issue, i can still see the voxlpm output afterwards.
-
Hi @Alex-Kushleyev,
Updated the PX4 firmware to 1.14
Adding the following two parameters to the list and load parameter from file seems to fix it for me? I could not find these 2 parameters in QGC initally. I am using the latest version of QGC (v4.30).
I tried to remove these 2 parameters but I could not reproduce my issue, i can still see the voxlpm output afterwards.
Default px4 parameter list.
# Onboard parameters for Vehicle 1 # # Stack: PX4 Pro # Vehicle: Multi-Rotor # Version: 1.14.0 dev # Git Revision: b02a6b4ae902003f # # Vehicle-Id Component-Id Name Value Type 1 1 ASPD_SCALE_1 1.000000000000000000 9 1 1 BAT1_CAPACITY 3000.000000000000000000 9 1 1 BAT1_N_CELLS 4 6 1 1 BAT1_R_INTERNAL 0.008000000379979610 9 1 1 BAT1_SOURCE 0 6 1 1 BAT1_V_CHARGED 4.150000095367431641 9 1 1 BAT1_V_EMPTY 3.599999904632568359 9 1 1 BAT1_V_LOAD_DROP 0.100000001490116119 9 1 1 BAT_AVRG_CURRENT 15.000000000000000000 9 1 1 BAT_CRIT_THR 0.250000000000000000 9 1 1 BAT_EMERGEN_THR 0.100000001490116119 9 1 1 BAT_LOW_THR 0.300000011920928955 9 1 1 BAT_N_CELLS 4 6 1 1 BAT_V_CHARGED 4.150000095367431641 9 1 1 BAT_V_EMPTY 3.599999904632568359 9 1 1 BAT_V_LOAD_DROP 0.300000011920928955 9 1 1 CAL_ACC0_ID 2490378 6 1 1 CAL_ACC0_PRIO 50 6 1 1 CAL_ACC0_ROT -1 6 1 1 CAL_ACC0_XOFF 0.000000000000000000 9 1 1 CAL_ACC0_XSCALE 1.000000000000000000 9 1 1 CAL_ACC0_YOFF 0.000000000000000000 9 1 1 CAL_ACC0_YSCALE 1.000000000000000000 9 1 1 CAL_ACC0_ZOFF 0.000000000000000000 9 1 1 CAL_ACC0_ZSCALE 1.000000000000000000 9 1 1 CAL_ACC1_ID 2490386 6 1 1 CAL_ACC1_PRIO 50 6 1 1 CAL_ACC1_ROT -1 6 1 1 CAL_ACC1_XOFF 0.000000000000000000 9 1 1 CAL_ACC1_XSCALE 1.000000000000000000 9 1 1 CAL_ACC1_YOFF 0.000000000000000000 9 1 1 CAL_ACC1_YSCALE 1.000000000000000000 9 1 1 CAL_ACC1_ZOFF 0.000000000000000000 9 1 1 CAL_ACC1_ZSCALE 1.000000000000000000 9 1 1 CAL_ACC2_ID 0 6 1 1 CAL_ACC3_ID 0 6 1 1 CAL_AIR_CMODEL 0 6 1 1 CAL_AIR_TUBED_MM 1.500000000000000000 9 1 1 CAL_AIR_TUBELEN 0.200000002980232239 9 1 1 CAL_BARO0_ID 0 6 1 1 CAL_BARO1_ID 0 6 1 1 CAL_BARO2_ID 0 6 1 1 CAL_BARO3_ID 0 6 1 1 CAL_GYRO0_ID 2490378 6 1 1 CAL_GYRO0_PRIO 50 6 1 1 CAL_GYRO0_ROT -1 6 1 1 CAL_GYRO0_XOFF -0.007948651909828186 9 1 1 CAL_GYRO0_YOFF 0.006882027722895145 9 1 1 CAL_GYRO0_ZOFF 0.005271935835480690 9 1 1 CAL_GYRO1_ID 2490386 6 1 1 CAL_GYRO1_PRIO 50 6 1 1 CAL_GYRO1_ROT -1 6 1 1 CAL_GYRO1_XOFF -0.014327573589980602 9 1 1 CAL_GYRO1_YOFF 0.010455547831952572 9 1 1 CAL_GYRO1_ZOFF 0.001255361014045775 9 1 1 CAL_GYRO2_ID 0 6 1 1 CAL_GYRO3_ID 0 6 1 1 CAL_MAG0_ID 396809 6 1 1 CAL_MAG0_PRIO 75 6 1 1 CAL_MAG0_ROT 10 6 1 1 CAL_MAG0_XCOMP 0.000000000000000000 9 1 1 CAL_MAG0_XODIAG 0.000000000000000000 9 1 1 CAL_MAG0_XOFF 0.000000000000000000 9 1 1 CAL_MAG0_XSCALE 1.000000000000000000 9 1 1 CAL_MAG0_YCOMP 0.000000000000000000 9 1 1 CAL_MAG0_YODIAG 0.000000000000000000 9 1 1 CAL_MAG0_YOFF 0.000000000000000000 9 1 1 CAL_MAG0_YSCALE 1.000000000000000000 9 1 1 CAL_MAG0_ZCOMP 0.000000000000000000 9 1 1 CAL_MAG0_ZODIAG 0.000000000000000000 9 1 1 CAL_MAG0_ZOFF 0.000000000000000000 9 1 1 CAL_MAG0_ZSCALE 1.000000000000000000 9 1 1 CAL_MAG1_ID 0 6 1 1 CAL_MAG1_ROT -1 6 1 1 CAL_MAG2_ID 0 6 1 1 CAL_MAG2_ROT -1 6 1 1 CAL_MAG3_ID 0 6 1 1 CAL_MAG3_ROT -1 6 1 1 CAM_CAP_FBACK 0 6 1 1 CA_AIRFRAME 0 6 1 1 CA_FAILURE_MODE 0 6 1 1 CA_METHOD 2 6 1 1 CA_R0_SLEW 0.000000000000000000 9 1 1 CA_R10_SLEW 0.000000000000000000 9 1 1 CA_R11_SLEW 0.000000000000000000 9 1 1 CA_R1_SLEW 0.000000000000000000 9 1 1 CA_R2_SLEW 0.000000000000000000 9 1 1 CA_R3_SLEW 0.000000000000000000 9 1 1 CA_R4_SLEW 0.000000000000000000 9 1 1 CA_R5_SLEW 0.000000000000000000 9 1 1 CA_R6_SLEW 0.000000000000000000 9 1 1 CA_R7_SLEW 0.000000000000000000 9 1 1 CA_R8_SLEW 0.000000000000000000 9 1 1 CA_R9_SLEW 0.000000000000000000 9 1 1 CA_ROTOR0_AX 0.000000000000000000 9 1 1 CA_ROTOR0_AY 0.000000000000000000 9 1 1 CA_ROTOR0_AZ -1.000000000000000000 9 1 1 CA_ROTOR0_CT 6.500000000000000000 9 1 1 CA_ROTOR0_KM 0.050000000745058060 9 1 1 CA_ROTOR0_PX 0.150000005960464478 9 1 1 CA_ROTOR0_PY 0.150000005960464478 9 1 1 CA_ROTOR0_PZ 0.000000000000000000 9 1 1 CA_ROTOR10_AX 0.000000000000000000 9 1 1 CA_ROTOR10_AY 0.000000000000000000 9 1 1 CA_ROTOR10_AZ -1.000000000000000000 9 1 1 CA_ROTOR10_CT 6.500000000000000000 9 1 1 CA_ROTOR10_KM 0.050000000745058060 9 1 1 CA_ROTOR10_PX 0.000000000000000000 9 1 1 CA_ROTOR10_PY 0.000000000000000000 9 1 1 CA_ROTOR10_PZ 0.000000000000000000 9 1 1 CA_ROTOR11_AX 0.000000000000000000 9 1 1 CA_ROTOR11_AY 0.000000000000000000 9 1 1 CA_ROTOR11_AZ -1.000000000000000000 9 1 1 CA_ROTOR11_CT 6.500000000000000000 9 1 1 CA_ROTOR11_KM 0.050000000745058060 9 1 1 CA_ROTOR11_PX 0.000000000000000000 9 1 1 CA_ROTOR11_PY 0.000000000000000000 9 1 1 CA_ROTOR11_PZ 0.000000000000000000 9 1 1 CA_ROTOR1_AX 0.000000000000000000 9 1 1 CA_ROTOR1_AY 0.000000000000000000 9 1 1 CA_ROTOR1_AZ -1.000000000000000000 9 1 1 CA_ROTOR1_CT 6.500000000000000000 9 1 1 CA_ROTOR1_KM 0.050000000745058060 9 1 1 CA_ROTOR1_PX -0.150000005960464478 9 1 1 CA_ROTOR1_PY -0.150000005960464478 9 1 1 CA_ROTOR1_PZ 0.000000000000000000 9 1 1 CA_ROTOR2_AX 0.000000000000000000 9 1 1 CA_ROTOR2_AY 0.000000000000000000 9 1 1 CA_ROTOR2_AZ -1.000000000000000000 9 1 1 CA_ROTOR2_CT 6.500000000000000000 9 1 1 CA_ROTOR2_KM -0.050000000745058060 9 1 1 CA_ROTOR2_PX 0.150000005960464478 9 1 1 CA_ROTOR2_PY -0.150000005960464478 9 1 1 CA_ROTOR2_PZ 0.000000000000000000 9 1 1 CA_ROTOR3_AX 0.000000000000000000 9 1 1 CA_ROTOR3_AY 0.000000000000000000 9 1 1 CA_ROTOR3_AZ -1.000000000000000000 9 1 1 CA_ROTOR3_CT 6.500000000000000000 9 1 1 CA_ROTOR3_KM -0.050000000745058060 9 1 1 CA_ROTOR3_PX -0.150000005960464478 9 1 1 CA_ROTOR3_PY 0.150000005960464478 9 1 1 CA_ROTOR3_PZ 0.000000000000000000 9 1 1 CA_ROTOR4_AX 0.000000000000000000 9 1 1 CA_ROTOR4_AY 0.000000000000000000 9 1 1 CA_ROTOR4_AZ -1.000000000000000000 9 1 1 CA_ROTOR4_CT 6.500000000000000000 9 1 1 CA_ROTOR4_KM 0.050000000745058060 9 1 1 CA_ROTOR4_PX 0.000000000000000000 9 1 1 CA_ROTOR4_PY 0.000000000000000000 9 1 1 CA_ROTOR4_PZ 0.000000000000000000 9 1 1 CA_ROTOR5_AX 0.000000000000000000 9 1 1 CA_ROTOR5_AY 0.000000000000000000 9 1 1 CA_ROTOR5_AZ -1.000000000000000000 9 1 1 CA_ROTOR5_CT 6.500000000000000000 9 1 1 CA_ROTOR5_KM 0.050000000745058060 9 1 1 CA_ROTOR5_PX 0.000000000000000000 9 1 1 CA_ROTOR5_PY 0.000000000000000000 9 1 1 CA_ROTOR5_PZ 0.000000000000000000 9 1 1 CA_ROTOR6_AX 0.000000000000000000 9 1 1 CA_ROTOR6_AY 0.000000000000000000 9 1 1 CA_ROTOR6_AZ -1.000000000000000000 9 1 1 CA_ROTOR6_CT 6.500000000000000000 9 1 1 CA_ROTOR6_KM 0.050000000745058060 9 1 1 CA_ROTOR6_PX 0.000000000000000000 9 1 1 CA_ROTOR6_PY 0.000000000000000000 9 1 1 CA_ROTOR6_PZ 0.000000000000000000 9 1 1 CA_ROTOR7_AX 0.000000000000000000 9 1 1 CA_ROTOR7_AY 0.000000000000000000 9 1 1 CA_ROTOR7_AZ -1.000000000000000000 9 1 1 CA_ROTOR7_CT 6.500000000000000000 9 1 1 CA_ROTOR7_KM 0.050000000745058060 9 1 1 CA_ROTOR7_PX 0.000000000000000000 9 1 1 CA_ROTOR7_PY 0.000000000000000000 9 1 1 CA_ROTOR7_PZ 0.000000000000000000 9 1 1 CA_ROTOR8_AX 0.000000000000000000 9 1 1 CA_ROTOR8_AY 0.000000000000000000 9 1 1 CA_ROTOR8_AZ -1.000000000000000000 9 1 1 CA_ROTOR8_CT 6.500000000000000000 9 1 1 CA_ROTOR8_KM 0.050000000745058060 9 1 1 CA_ROTOR8_PX 0.000000000000000000 9 1 1 CA_ROTOR8_PY 0.000000000000000000 9 1 1 CA_ROTOR8_PZ 0.000000000000000000 9 1 1 CA_ROTOR9_AX 0.000000000000000000 9 1 1 CA_ROTOR9_AY 0.000000000000000000 9 1 1 CA_ROTOR9_AZ -1.000000000000000000 9 1 1 CA_ROTOR9_CT 6.500000000000000000 9 1 1 CA_ROTOR9_KM 0.050000000745058060 9 1 1 CA_ROTOR9_PX 0.000000000000000000 9 1 1 CA_ROTOR9_PY 0.000000000000000000 9 1 1 CA_ROTOR9_PZ 0.000000000000000000 9 1 1 CA_ROTOR_COUNT 4 6 1 1 CA_R_REV 0 6 1 1 CA_SV0_SLEW 0.000000000000000000 9 1 1 CA_SV1_SLEW 0.000000000000000000 9 1 1 CA_SV2_SLEW 0.000000000000000000 9 1 1 CA_SV3_SLEW 0.000000000000000000 9 1 1 CA_SV4_SLEW 0.000000000000000000 9 1 1 CA_SV5_SLEW 0.000000000000000000 9 1 1 CA_SV6_SLEW 0.000000000000000000 9 1 1 CA_SV7_SLEW 0.000000000000000000 9 1 1 CBRK_AIRSPD_CHK 0 6 1 1 CBRK_BUZZER 0 6 1 1 CBRK_FLIGHTTERM 121212 6 1 1 CBRK_IO_SAFETY 22027 6 1 1 CBRK_SUPPLY_CHK 0 6 1 1 CBRK_USB_CHK 197848 6 1 1 CBRK_VTOLARMING 0 6 1 1 COM_ACT_FAIL_ACT 0 6 1 1 COM_ARM_ARSP_EN 1 6 1 1 COM_ARM_AUTH_ID 10 6 1 1 COM_ARM_AUTH_MET 0 6 1 1 COM_ARM_AUTH_REQ 0 6 1 1 COM_ARM_AUTH_TO 1.000000000000000000 9 1 1 COM_ARM_BAD_INOV 0 6 1 1 COM_ARM_CHK_ESCS 0 6 1 1 COM_ARM_EKF_BIAS 3.000000000000000000 9 1 1 COM_ARM_EKF_HGT 1.000000000000000000 9 1 1 COM_ARM_EKF_POS 0.500000000000000000 9 1 1 COM_ARM_EKF_VEL 0.500000000000000000 9 1 1 COM_ARM_EKF_YAW 0.500000000000000000 9 1 1 COM_ARM_HFLT_CHK 1 6 1 1 COM_ARM_IMU_ACC 0.699999988079071045 9 1 1 COM_ARM_IMU_GYR 0.250000000000000000 9 1 1 COM_ARM_MAG_ANG 60 6 1 1 COM_ARM_MAG_STR 2 6 1 1 COM_ARM_MIS_REQ 0 6 1 1 COM_ARM_ODID 0 6 1 1 COM_ARM_SDCARD 1 6 1 1 COM_ARM_SWISBTN 0 6 1 1 COM_ARM_WO_GPS 1 6 1 1 COM_CPU_MAX 95.000000000000000000 9 1 1 COM_DISARM_FORCE 0 6 1 1 COM_DISARM_LAND 0.100000001490116119 9 1 1 COM_DISARM_PRFLT 20.000000000000000000 9 1 1 COM_DL_LOSS_T 10 6 1 1 COM_FAIL_ACT_T 5.000000000000000000 9 1 1 COM_FLIGHT_UUID 0 6 1 1 COM_FLTMODE1 1 6 1 1 COM_FLTMODE2 0 6 1 1 COM_FLTMODE3 0 6 1 1 COM_FLTMODE4 2 6 1 1 COM_FLTMODE5 0 6 1 1 COM_FLTMODE6 7 6 1 1 COM_FLT_PROFILE 0 6 1 1 COM_FLT_TIME_MAX -1 6 1 1 COM_FORCE_SAFETY 0 6 1 1 COM_HLDL_LOSS_T 120 6 1 1 COM_HLDL_REG_T 0 6 1 1 COM_HOME_EN 1 6 1 1 COM_HOME_IN_AIR 0 6 1 1 COM_IMB_PROP_ACT 0 6 1 1 COM_KILL_DISARM 5.000000000000000000 9 1 1 COM_LKDOWN_TKO 3.000000000000000000 9 1 1 COM_LOW_BAT_ACT 0 6 1 1 COM_MOT_TEST_EN 1 6 1 1 COM_OBC_LOSS_T 5.000000000000000000 9 1 1 COM_OBL_RC_ACT 0 6 1 1 COM_OBS_AVOID 0 6 1 1 COM_OF_LOSS_T 1.000000000000000000 9 1 1 COM_PARACHUTE 0 6 1 1 COM_POSCTL_NAVL 0 6 1 1 COM_POS_FS_DELAY 1 6 1 1 COM_POS_FS_EPH 5.000000000000000000 9 1 1 COM_POS_LOW_EPH -1.000000000000000000 9 1 1 COM_POWER_COUNT 1 6 1 1 COM_PREARM_MODE 0 6 1 1 COM_QC_ACT 0 6 1 1 COM_RCL_EXCEPT 0 6 1 1 COM_RC_ARM_HYST 1000 6 1 1 COM_RC_IN_MODE 3 6 1 1 COM_RC_LOSS_T 0.500000000000000000 9 1 1 COM_RC_OVERRIDE 1 6 1 1 COM_RC_STICK_OV 30.000000000000000000 9 1 1 COM_SPOOLUP_TIME 1.000000000000000000 9 1 1 COM_TAKEOFF_ACT 0 6 1 1 COM_VEL_FS_EVH 1.000000000000000000 9 1 1 COM_WIND_MAX -1.000000000000000000 9 1 1 COM_WIND_WARN -1.000000000000000000 9 1 1 CP_DELAY 0.400000005960464478 9 1 1 CP_DIST 1.000000000000000000 9 1 1 CP_GO_NO_DATA 1 6 1 1 CP_GUIDE_ANG 0.000000000000000000 9 1 1 DSHOT_3D_DEAD_H 1000 6 1 1 DSHOT_3D_DEAD_L 1000 6 1 1 DSHOT_3D_ENABLE 0 6 1 1 DSHOT_MIN 0.054999999701976776 9 1 1 DSHOT_TEL_CFG 0 6 1 1 EKF2_ABIAS_INIT 0.200000002980232239 9 1 1 EKF2_ABL_ACCLIM 25.000000000000000000 9 1 1 EKF2_ABL_GYRLIM 3.000000000000000000 9 1 1 EKF2_ABL_LIM 0.400000005960464478 9 1 1 EKF2_ABL_TAU 0.500000000000000000 9 1 1 EKF2_ACC_B_NOISE 0.003000000026077032 9 1 1 EKF2_ACC_NOISE 0.349999994039535522 9 1 1 EKF2_AID_MASK 0 6 1 1 EKF2_ANGERR_INIT 0.100000001490116119 9 1 1 EKF2_ARSP_THR 0.000000000000000000 9 1 1 EKF2_ASPD_MAX 20.000000000000000000 9 1 1 EKF2_ASP_DELAY 100.000000000000000000 9 1 1 EKF2_AVEL_DELAY 5.000000000000000000 9 1 1 EKF2_BARO_CTRL 1 6 1 1 EKF2_BARO_DELAY 0.000000000000000000 9 1 1 EKF2_BARO_GATE 5.000000000000000000 9 1 1 EKF2_BARO_NOISE 3.500000000000000000 9 1 1 EKF2_BCOEF_X 100.000000000000000000 9 1 1 EKF2_BCOEF_Y 100.000000000000000000 9 1 1 EKF2_BETA_GATE 5.000000000000000000 9 1 1 EKF2_BETA_NOISE 0.300000011920928955 9 1 1 EKF2_DECL_TYPE 7 6 1 1 EKF2_DRAG_CTRL 0 6 1 1 EKF2_DRAG_NOISE 2.500000000000000000 9 1 1 EKF2_EAS_NOISE 1.399999976158142090 9 1 1 EKF2_EVA_NOISE 0.100000001490116119 9 1 1 EKF2_EVP_GATE 5.000000000000000000 9 1 1 EKF2_EVP_NOISE 0.100000001490116119 9 1 1 EKF2_EVV_GATE 3.000000000000000000 9 1 1 EKF2_EVV_NOISE 0.100000001490116119 9 1 1 EKF2_EV_CTRL 15 6 1 1 EKF2_EV_DELAY 0.000000000000000000 9 1 1 EKF2_EV_HGT_TO 5000 6 1 1 EKF2_EV_NOISE_MD 0 6 1 1 EKF2_EV_POS_TO 1000 6 1 1 EKF2_EV_POS_X 0.000000000000000000 9 1 1 EKF2_EV_POS_Y 0.000000000000000000 9 1 1 EKF2_EV_POS_Z 0.000000000000000000 9 1 1 EKF2_EV_QMIN 0 6 1 1 EKF2_FUSE_BETA 0 6 1 1 EKF2_GBIAS_INIT 0.100000001490116119 9 1 1 EKF2_GND_EFF_DZ 4.000000000000000000 9 1 1 EKF2_GND_MAX_HGT 0.500000000000000000 9 1 1 EKF2_GPS_CHECK 245 6 1 1 EKF2_GPS_CTRL 7 6 1 1 EKF2_GPS_DELAY 110.000000000000000000 9 1 1 EKF2_GPS_POS_X 0.000000000000000000 9 1 1 EKF2_GPS_POS_Y 0.000000000000000000 9 1 1 EKF2_GPS_POS_Z 0.000000000000000000 9 1 1 EKF2_GPS_P_GATE 5.000000000000000000 9 1 1 EKF2_GPS_P_NOISE 0.500000000000000000 9 1 1 EKF2_GPS_V_GATE 5.000000000000000000 9 1 1 EKF2_GPS_V_NOISE 0.300000011920928955 9 1 1 EKF2_GRAV_NOISE 1.000000000000000000 9 1 1 EKF2_GSF_TAS 15.000000000000000000 9 1 1 EKF2_GYR_B_LIM 0.150000005960464478 9 1 1 EKF2_GYR_B_NOISE 0.001000000047497451 9 1 1 EKF2_GYR_NOISE 0.014999999664723873 9 1 1 EKF2_HDG_GATE 2.599999904632568359 9 1 1 EKF2_HEAD_NOISE 0.300000011920928955 9 1 1 EKF2_HGT_REF 3 6 1 1 EKF2_IMU_CTRL 3 6 1 1 EKF2_IMU_POS_X -0.028000000864267349 9 1 1 EKF2_IMU_POS_Y -0.004000000189989805 9 1 1 EKF2_IMU_POS_Z -0.008000000379979610 9 1 1 EKF2_MAG_ACCLIM 0.500000000000000000 9 1 1 EKF2_MAG_B_NOISE 0.000099999997473788 9 1 1 EKF2_MAG_CHECK 1 6 1 1 EKF2_MAG_DECL 0.000000000000000000 9 1 1 EKF2_MAG_DELAY 0.000000000000000000 9 1 1 EKF2_MAG_E_NOISE 0.001000000047497451 9 1 1 EKF2_MAG_GATE 3.000000000000000000 9 1 1 EKF2_MAG_NOISE 0.050000000745058060 9 1 1 EKF2_MAG_TYPE 5 6 1 1 EKF2_MAG_YAWLIM 0.200000002980232239 9 1 1 EKF2_MCOEF 0.150000005960464478 9 1 1 EKF2_MIN_RNG 0.100000001490116119 9 1 1 EKF2_MULTI_IMU 3 6 1 1 EKF2_MULTI_MAG 3 6 1 1 EKF2_NOAID_NOISE 10.000000000000000000 9 1 1 EKF2_NOAID_TOUT 5000000 6 1 1 EKF2_OF_CTRL 0 6 1 1 EKF2_OF_DELAY 20.000000000000000000 9 1 1 EKF2_OF_GATE 3.000000000000000000 9 1 1 EKF2_OF_N_MAX 0.500000000000000000 9 1 1 EKF2_OF_N_MIN 0.150000005960464478 9 1 1 EKF2_OF_POS_X 0.000000000000000000 9 1 1 EKF2_OF_POS_Y 0.000000000000000000 9 1 1 EKF2_OF_POS_Z 0.000000000000000000 9 1 1 EKF2_OF_QMIN 1 6 1 1 EKF2_PCOEF_XN 0.000000000000000000 9 1 1 EKF2_PCOEF_XP 0.000000000000000000 9 1 1 EKF2_PCOEF_YN 0.000000000000000000 9 1 1 EKF2_PCOEF_YP 0.000000000000000000 9 1 1 EKF2_PCOEF_Z 0.000000000000000000 9 1 1 EKF2_PREDICT_US 10000 6 1 1 EKF2_REQ_EPH 3.000000000000000000 9 1 1 EKF2_REQ_EPV 5.000000000000000000 9 1 1 EKF2_REQ_GPS_H 10.000000000000000000 9 1 1 EKF2_REQ_HDRIFT 0.100000001490116119 9 1 1 EKF2_REQ_NSATS 6 6 1 1 EKF2_REQ_PDOP 2.500000000000000000 9 1 1 EKF2_REQ_SACC 1.000000000000000000 9 1 1 EKF2_REQ_VDRIFT 0.200000002980232239 9 1 1 EKF2_RNG_A_HMAX 5.000000000000000000 9 1 1 EKF2_RNG_A_IGATE 1.000000000000000000 9 1 1 EKF2_RNG_A_VMAX 1.000000000000000000 9 1 1 EKF2_RNG_CTRL 1 6 1 1 EKF2_RNG_DELAY 5.000000000000000000 9 1 1 EKF2_RNG_GATE 5.000000000000000000 9 1 1 EKF2_RNG_K_GATE 1.000000000000000000 9 1 1 EKF2_RNG_NOISE 0.100000001490116119 9 1 1 EKF2_RNG_PITCH 0.000000000000000000 9 1 1 EKF2_RNG_POS_X 0.000000000000000000 9 1 1 EKF2_RNG_POS_Y 0.000000000000000000 9 1 1 EKF2_RNG_POS_Z 0.000000000000000000 9 1 1 EKF2_RNG_QLTY_T 1.000000000000000000 9 1 1 EKF2_RNG_SFE 0.050000000745058060 9 1 1 EKF2_SEL_ERR_RED 0.200000002980232239 9 1 1 EKF2_SEL_IMU_ACC 1.000000000000000000 9 1 1 EKF2_SEL_IMU_ANG 15.000000000000000000 9 1 1 EKF2_SEL_IMU_RAT 7.000000000000000000 9 1 1 EKF2_SEL_IMU_VEL 2.000000000000000000 9 1 1 EKF2_SYNT_MAG_Z 0 6 1 1 EKF2_TAS_GATE 3.000000000000000000 9 1 1 EKF2_TAU_POS 0.250000000000000000 9 1 1 EKF2_TAU_VEL 0.250000000000000000 9 1 1 EKF2_TERR_GRAD 0.500000000000000000 9 1 1 EKF2_TERR_MASK 3 6 1 1 EKF2_TERR_NOISE 5.000000000000000000 9 1 1 EKF2_WIND_NSD 0.009999999776482582 9 1 1 EV_TSK_RC_LOSS 0 6 1 1 EV_TSK_STAT_DIS 0 6 1 1 FD_ACT_EN 1 6 1 1 FD_ACT_MOT_C2T 2.000000000000000000 9 1 1 FD_ACT_MOT_THR 0.200000002980232239 9 1 1 FD_ACT_MOT_TOUT 100 6 1 1 FD_ESCS_EN 1 6 1 1 FD_EXT_ATS_EN 0 6 1 1 FD_EXT_ATS_TRIG 1900 6 1 1 FD_FAIL_P 60 6 1 1 FD_FAIL_P_TTRI 0.300000011920928955 9 1 1 FD_FAIL_R 60 6 1 1 FD_FAIL_R_TTRI 0.300000011920928955 9 1 1 FD_IMB_PROP_THR 30 6 1 1 FLW_TGT_ALT_M 0 6 1 1 FLW_TGT_DST 8.000000000000000000 9 1 1 FLW_TGT_FA 180.000000000000000000 9 1 1 FLW_TGT_HT 8.000000000000000000 9 1 1 FLW_TGT_MAX_VEL 5.000000000000000000 9 1 1 FLW_TGT_RS 0.100000001490116119 9 1 1 FW_AIRSPD_MAX 20.000000000000000000 9 1 1 FW_AIRSPD_TRIM 15.000000000000000000 9 1 1 FW_ARSP_MODE 0 6 1 1 FW_PSP_OFF 0.000000000000000000 9 1 1 FW_T_CLMB_R_SP 3.000000000000000000 9 1 1 FW_T_SINK_R_SP 2.000000000000000000 9 1 1 GF_ACTION 2 6 1 1 GF_ALTMODE 0 6 1 1 GF_COUNT -1 6 1 1 GF_MAX_HOR_DIST 0.000000000000000000 9 1 1 GF_MAX_VER_DIST 0.000000000000000000 9 1 1 GF_PREDICT 0 6 1 1 GF_SOURCE 0 6 1 1 GND_SPEED_THR_SC 1.000000000000000000 9 1 1 GPS_1_CONFIG 201 6 1 1 GPS_1_GNSS 0 6 1 1 GPS_1_PROTOCOL 1 6 1 1 GPS_2_CONFIG 0 6 1 1 GPS_DUMP_COMM 0 6 1 1 GPS_PITCH_OFFSET 0.000000000000000000 9 1 1 GPS_SAT_INFO 0 6 1 1 GPS_UBX_BAUD2 230400 6 1 1 GPS_UBX_CFG_INTF 0 6 1 1 GPS_UBX_DYNMODEL 6 6 1 1 GPS_UBX_MODE 0 6 1 1 GPS_YAW_OFFSET 0.000000000000000000 9 1 1 HTE_ACC_GATE 3.000000000000000000 9 1 1 HTE_HT_ERR_INIT 0.100000001490116119 9 1 1 HTE_HT_NOISE 0.003599999938160181 9 1 1 HTE_THR_RANGE 0.200000002980232239 9 1 1 HTE_VXY_THR 10.000000000000000000 9 1 1 HTE_VZ_THR 2.000000000000000000 9 1 1 IMU_ACCEL_CUTOFF 30.000000000000000000 9 1 1 IMU_DGYRO_CUTOFF 30.000000000000000000 9 1 1 IMU_GYRO_CAL_EN 1 6 1 1 IMU_GYRO_CUTOFF 30.000000000000000000 9 1 1 IMU_GYRO_DNF_BW 15.000000000000000000 9 1 1 IMU_GYRO_DNF_EN 0 6 1 1 IMU_GYRO_DNF_HMC 3 6 1 1 IMU_GYRO_DNF_MIN 25.000000000000000000 9 1 1 IMU_GYRO_FFT_EN 1 6 1 1 IMU_GYRO_FFT_LEN 512 6 1 1 IMU_GYRO_FFT_MAX 150.000000000000000000 9 1 1 IMU_GYRO_FFT_MIN 30.000000000000000000 9 1 1 IMU_GYRO_FFT_SNR 10.000000000000000000 9 1 1 IMU_GYRO_NF0_BW 30.000000000000000000 9 1 1 IMU_GYRO_NF0_FRQ 85.000000000000000000 9 1 1 IMU_GYRO_NF1_BW 20.000000000000000000 9 1 1 IMU_GYRO_NF1_FRQ 0.000000000000000000 9 1 1 IMU_GYRO_RATEMAX 800 6 1 1 IMU_INTEG_RATE 200 6 1 1 LNDMC_ALT_GND 2.000000000000000000 9 1 1 LNDMC_ALT_MAX -1.000000000000000000 9 1 1 LNDMC_ROT_MAX 30.000000000000000000 9 1 1 LNDMC_TRIG_TIME 1.000000000000000000 9 1 1 LNDMC_XY_VEL_MAX 1.500000000000000000 9 1 1 LNDMC_Z_VEL_MAX 0.250000000000000000 9 1 1 LND_FLIGHT_T_HI 0 6 1 1 LND_FLIGHT_T_LO 2075074960 6 1 1 MAN_ARM_GESTURE 1 6 1 1 MAV_0_CONFIG 0 6 1 1 MAV_1_CONFIG 101 6 1 1 MAV_1_FLOW_CTRL 2 6 1 1 MAV_1_FORWARD 0 6 1 1 MAV_1_MODE 2 6 1 1 MAV_1_RADIO_CTL 1 6 1 1 MAV_1_RATE 0 6 1 1 MAV_2_CONFIG 0 6 1 1 MAV_COMP_ID 1 6 1 1 MAV_FWDEXTSP 1 6 1 1 MAV_HASH_CHK_EN 1 6 1 1 MAV_HB_FORW_EN 1 6 1 1 MAV_PROTO_VER 0 6 1 1 MAV_RADIO_TOUT 5 6 1 1 MAV_SIK_RADIO_ID 0 6 1 1 MAV_SYS_ID 1 6 1 1 MAV_TYPE 2 6 1 1 MAV_USEHILGPS 0 6 1 1 MBE_ENABLE 1 6 1 1 MBE_LEARN_GAIN 18.000000000000000000 9 1 1 MC_ACRO_EXPO 0.689999997615814209 9 1 1 MC_ACRO_EXPO_Y 0.689999997615814209 9 1 1 MC_ACRO_P_MAX 720.000000000000000000 9 1 1 MC_ACRO_R_MAX 720.000000000000000000 9 1 1 MC_ACRO_SUPEXPO 0.699999988079071045 9 1 1 MC_ACRO_SUPEXPOY 0.699999988079071045 9 1 1 MC_ACRO_Y_MAX 540.000000000000000000 9 1 1 MC_AIRMODE 0 6 1 1 MC_AT_APPLY 1 6 1 1 MC_AT_AXES 3 6 1 1 MC_AT_EN 1 6 1 1 MC_AT_RISE_TIME 0.140000000596046448 9 1 1 MC_AT_START 0 6 1 1 MC_AT_SYSID_AMP 0.699999988079071045 9 1 1 MC_BAT_SCALE_EN 1 6 1 1 MC_INJECT_AMP 0.050000000745058060 9 1 1 MC_INJECT_CNT 0 6 1 1 MC_INJECT_EN 0 6 1 1 MC_INJECT_INC 1.000000000000000000 9 1 1 MC_INJECT_REST_T 1.000000000000000000 9 1 1 MC_INJECT_RPY 0 6 1 1 MC_INJECT_SINE_T 5.000000000000000000 9 1 1 MC_INJECT_START 3.000000000000000000 9 1 1 MC_MAN_TILT_TAU 0.000000000000000000 9 1 1 MC_ORBIT_RAD_MAX 1000.000000000000000000 9 1 1 MC_PITCHRATE_D 0.002640000078827143 9 1 1 MC_PITCHRATE_FF 0.000000000000000000 9 1 1 MC_PITCHRATE_I 0.229000002145767212 9 1 1 MC_PITCHRATE_K 1.000000000000000000 9 1 1 MC_PITCHRATE_MAX 220.000000000000000000 9 1 1 MC_PITCHRATE_P 0.130999997258186340 9 1 1 MC_PITCH_CUTOFF 0.000000000000000000 9 1 1 MC_PITCH_P 7.000000000000000000 9 1 1 MC_PR_INT_LIM 0.300000011920928955 9 1 1 MC_ROLLRATE_D 0.003349999897181988 9 1 1 MC_ROLLRATE_FF 0.000000000000000000 9 1 1 MC_ROLLRATE_I 0.259000003337860107 9 1 1 MC_ROLLRATE_K 1.000000000000000000 9 1 1 MC_ROLLRATE_MAX 220.000000000000000000 9 1 1 MC_ROLLRATE_P 0.144999995827674866 9 1 1 MC_ROLL_CUTOFF 0.000000000000000000 9 1 1 MC_ROLL_P 7.000000000000000000 9 1 1 MC_RR_INT_LIM 0.300000011920928955 9 1 1 MC_THR_CURVE_ACR 0 6 1 1 MC_YAWRATE_D 0.000000000000000000 9 1 1 MC_YAWRATE_FF 0.000000000000000000 9 1 1 MC_YAWRATE_I 0.100000001490116119 9 1 1 MC_YAWRATE_K 1.000000000000000000 9 1 1 MC_YAWRATE_MAX 200.000000000000000000 9 1 1 MC_YAWRATE_P 0.150000005960464478 9 1 1 MC_YAW_CUTOFF 0.000000000000000000 9 1 1 MC_YAW_P 2.000000000000000000 9 1 1 MC_YAW_WEIGHT 0.400000005960464478 9 1 1 MC_YR_INT_LIM 0.300000011920928955 9 1 1 MIS_DIST_1WP 900.000000000000000000 9 1 1 MIS_LND_ABRT_ALT 30 6 1 1 MIS_MNT_YAW_CTL 0 6 1 1 MIS_PD_TO 5.000000000000000000 9 1 1 MIS_TAKEOFF_ALT 2.500000000000000000 9 1 1 MIS_TKO_LAND_REQ 0 6 1 1 MIS_YAW_ERR 12.000000000000000000 9 1 1 MIS_YAW_TMT -1.000000000000000000 9 1 1 MNT_MODE_IN -1 6 1 1 MODALAI_CONFIG 0 6 1 1 MOT_POLE_COUNT 0 6 1 1 MOT_SLEW_MAX 0.000000000000000000 9 1 1 MPC_ACC_DOWN_MAX 3.000000000000000000 9 1 1 MPC_ACC_HOR 5.000000000000000000 9 1 1 MPC_ACC_HOR_MAX 6.000000000000000000 9 1 1 MPC_ACC_UP_MAX 3.000000000000000000 9 1 1 MPC_ALT_MODE 0 6 1 1 MPC_HOLD_DZ 0.100000001490116119 9 1 1 MPC_HOLD_MAX_XY 0.800000011920928955 9 1 1 MPC_HOLD_MAX_Z 0.600000023841857910 9 1 1 MPC_JERK_AUTO 4.000000000000000000 9 1 1 MPC_JERK_MAX 40.000000000000000000 9 1 1 MPC_LAND_ALT1 10.000000000000000000 9 1 1 MPC_LAND_ALT2 5.000000000000000000 9 1 1 MPC_LAND_ALT3 1.000000000000000000 9 1 1 MPC_LAND_CRWL 0.300000011920928955 9 1 1 MPC_LAND_RADIUS 1000.000000000000000000 9 1 1 MPC_LAND_RC_HELP 0 6 1 1 MPC_LAND_SPEED 1.000000000000000000 9 1 1 MPC_MANTHR_MIN 0.079999998211860657 9 1 1 MPC_MAN_TILT_MAX 35.000000000000000000 9 1 1 MPC_MAN_Y_MAX 150.000000000000000000 9 1 1 MPC_MAN_Y_TAU 0.079999998211860657 9 1 1 MPC_POS_MODE 0 6 1 1 MPC_THR_CURVE 0 6 1 1 MPC_THR_HOVER 0.224999994039535522 9 1 1 MPC_THR_MAX 0.750000000000000000 9 1 1 MPC_THR_MIN 0.079999998211860657 9 1 1 MPC_THR_XY_MARG 0.300000011920928955 9 1 1 MPC_TILTMAX_AIR 30.000000000000000000 9 1 1 MPC_TILTMAX_LND 12.000000000000000000 9 1 1 MPC_TKO_RAMP_T 2.000000000000000000 9 1 1 MPC_TKO_SPEED 1.500000000000000000 9 1 1 MPC_USE_HTE 0 6 1 1 MPC_VELD_LP 5.000000000000000000 9 1 1 MPC_VEL_MANUAL 10.000000000000000000 9 1 1 MPC_VEL_MAN_BACK -1.000000000000000000 9 1 1 MPC_VEL_MAN_SIDE -1.000000000000000000 9 1 1 MPC_XY_CRUISE 5.000000000000000000 9 1 1 MPC_XY_ERR_MAX 2.000000000000000000 9 1 1 MPC_XY_MAN_EXPO 0.449999988079071045 9 1 1 MPC_XY_P 0.949999988079071045 9 1 1 MPC_XY_TRAJ_P 0.500000000000000000 9 1 1 MPC_XY_VEL_ALL -10.000000000000000000 9 1 1 MPC_XY_VEL_D_ACC 0.000000000000000000 9 1 1 MPC_XY_VEL_I_ACC 0.100000001490116119 9 1 1 MPC_XY_VEL_MAX 10.000000000000000000 9 1 1 MPC_XY_VEL_P_ACC 3.000000000000000000 9 1 1 MPC_YAWRAUTO_MAX 45.000000000000000000 9 1 1 MPC_YAW_EXPO 0.300000011920928955 9 1 1 MPC_YAW_MODE 0 6 1 1 MPC_Z_MAN_EXPO 0.300000011920928955 9 1 1 MPC_Z_P 3.000000000000000000 9 1 1 MPC_Z_VEL_ALL -3.000000000000000000 9 1 1 MPC_Z_VEL_D_ACC 0.000000000000000000 9 1 1 MPC_Z_VEL_I_ACC 2.000000000000000000 9 1 1 MPC_Z_VEL_MAX_DN 2.000000000000000000 9 1 1 MPC_Z_VEL_MAX_UP 2.000000000000000000 9 1 1 MPC_Z_VEL_P_ACC 12.000000000000000000 9 1 1 MPC_Z_V_AUTO_DN 1.500000000000000000 9 1 1 MPC_Z_V_AUTO_UP 2.000000000000000000 9 1 1 MSP_OSD_CONFIG 0 6 1 1 NAV_ACC_RAD 2.000000000000000000 9 1 1 NAV_DLL_ACT 0 6 1 1 NAV_FORCE_VT 1 6 1 1 NAV_FW_ALTL_RAD 5.000000000000000000 9 1 1 NAV_FW_ALT_RAD 10.000000000000000000 9 1 1 NAV_LOITER_RAD 80.000000000000000000 9 1 1 NAV_MC_ALT_RAD 0.800000011920928955 9 1 1 NAV_MIN_LTR_ALT -1.000000000000000000 9 1 1 NAV_RCL_ACT 2 6 1 1 NAV_TRAFF_AVOID 1 6 1 1 NAV_TRAFF_A_HOR 500.000000000000000000 9 1 1 NAV_TRAFF_A_VER 500.000000000000000000 9 1 1 NAV_TRAFF_COLL_T 60 6 1 1 PLD_BTOUT 5.000000000000000000 9 1 1 PLD_FAPPR_ALT 0.100000001490116119 9 1 1 PLD_HACC_RAD 0.200000002980232239 9 1 1 PLD_MAX_SRCH 3 6 1 1 PLD_SRCH_ALT 10.000000000000000000 9 1 1 PLD_SRCH_TOUT 10.000000000000000000 9 1 1 PWM_MAIN_DIS1 900 6 1 1 PWM_MAIN_DIS2 900 6 1 1 PWM_MAIN_DIS3 900 6 1 1 PWM_MAIN_DIS4 900 6 1 1 PWM_MAIN_DIS5 900 6 1 1 PWM_MAIN_DIS6 900 6 1 1 PWM_MAIN_DIS7 900 6 1 1 PWM_MAIN_DIS8 900 6 1 1 PWM_MAIN_FAIL1 -1 6 1 1 PWM_MAIN_FAIL2 -1 6 1 1 PWM_MAIN_FAIL3 -1 6 1 1 PWM_MAIN_FAIL4 -1 6 1 1 PWM_MAIN_FAIL5 -1 6 1 1 PWM_MAIN_FAIL6 -1 6 1 1 PWM_MAIN_FAIL7 -1 6 1 1 PWM_MAIN_FAIL8 -1 6 1 1 PWM_MAIN_FUNC1 101 6 1 1 PWM_MAIN_FUNC2 102 6 1 1 PWM_MAIN_FUNC3 103 6 1 1 PWM_MAIN_FUNC4 104 6 1 1 PWM_MAIN_FUNC5 0 6 1 1 PWM_MAIN_FUNC6 0 6 1 1 PWM_MAIN_FUNC7 0 6 1 1 PWM_MAIN_FUNC8 0 6 1 1 PWM_MAIN_MAX1 2000 6 1 1 PWM_MAIN_MAX2 2000 6 1 1 PWM_MAIN_MAX3 2000 6 1 1 PWM_MAIN_MAX4 2000 6 1 1 PWM_MAIN_MAX5 2000 6 1 1 PWM_MAIN_MAX6 2000 6 1 1 PWM_MAIN_MAX7 2000 6 1 1 PWM_MAIN_MAX8 2000 6 1 1 PWM_MAIN_MIN1 1000 6 1 1 PWM_MAIN_MIN2 1000 6 1 1 PWM_MAIN_MIN3 1000 6 1 1 PWM_MAIN_MIN4 1000 6 1 1 PWM_MAIN_MIN5 1000 6 1 1 PWM_MAIN_MIN6 1000 6 1 1 PWM_MAIN_MIN7 1000 6 1 1 PWM_MAIN_MIN8 1000 6 1 1 PWM_MAIN_REV 0 6 1 1 PWM_MAIN_TIM0 -2 6 1 1 PWM_MAIN_TIM1 400 6 1 1 PWM_MAIN_TIM2 400 6 1 1 RC10_DZ 0.000000000000000000 9 1 1 RC10_MAX 2000.000000000000000000 9 1 1 RC10_MIN 1000.000000000000000000 9 1 1 RC10_REV 1.000000000000000000 9 1 1 RC10_TRIM 1500.000000000000000000 9 1 1 RC11_DZ 0.000000000000000000 9 1 1 RC11_MAX 2000.000000000000000000 9 1 1 RC11_MIN 1000.000000000000000000 9 1 1 RC11_REV 1.000000000000000000 9 1 1 RC11_TRIM 1500.000000000000000000 9 1 1 RC12_DZ 0.000000000000000000 9 1 1 RC12_MAX 2000.000000000000000000 9 1 1 RC12_MIN 1000.000000000000000000 9 1 1 RC12_REV 1.000000000000000000 9 1 1 RC12_TRIM 1500.000000000000000000 9 1 1 RC13_DZ 0.000000000000000000 9 1 1 RC13_MAX 2000.000000000000000000 9 1 1 RC13_MIN 1000.000000000000000000 9 1 1 RC13_REV 1.000000000000000000 9 1 1 RC13_TRIM 1500.000000000000000000 9 1 1 RC14_DZ 0.000000000000000000 9 1 1 RC14_MAX 2000.000000000000000000 9 1 1 RC14_MIN 1000.000000000000000000 9 1 1 RC14_REV 1.000000000000000000 9 1 1 RC14_TRIM 1500.000000000000000000 9 1 1 RC15_DZ 0.000000000000000000 9 1 1 RC15_MAX 2000.000000000000000000 9 1 1 RC15_MIN 1000.000000000000000000 9 1 1 RC15_REV 1.000000000000000000 9 1 1 RC15_TRIM 1500.000000000000000000 9 1 1 RC16_DZ 0.000000000000000000 9 1 1 RC16_MAX 2000.000000000000000000 9 1 1 RC16_MIN 1000.000000000000000000 9 1 1 RC16_REV 1.000000000000000000 9 1 1 RC16_TRIM 1500.000000000000000000 9 1 1 RC17_DZ 0.000000000000000000 9 1 1 RC17_MAX 2000.000000000000000000 9 1 1 RC17_MIN 1000.000000000000000000 9 1 1 RC17_REV 1.000000000000000000 9 1 1 RC17_TRIM 1500.000000000000000000 9 1 1 RC18_DZ 0.000000000000000000 9 1 1 RC18_MAX 2000.000000000000000000 9 1 1 RC18_MIN 1000.000000000000000000 9 1 1 RC18_REV 1.000000000000000000 9 1 1 RC18_TRIM 1500.000000000000000000 9 1 1 RC1_DZ 10.000000000000000000 9 1 1 RC1_MAX 1897.000000000000000000 9 1 1 RC1_MIN 1103.000000000000000000 9 1 1 RC1_REV -1.000000000000000000 9 1 1 RC1_TRIM 1502.000000000000000000 9 1 1 RC2_DZ 10.000000000000000000 9 1 1 RC2_MAX 1897.000000000000000000 9 1 1 RC2_MIN 1103.000000000000000000 9 1 1 RC2_REV 1.000000000000000000 9 1 1 RC2_TRIM 1501.000000000000000000 9 1 1 RC3_DZ 10.000000000000000000 9 1 1 RC3_MAX 1898.000000000000000000 9 1 1 RC3_MIN 1102.000000000000000000 9 1 1 RC3_REV 1.000000000000000000 9 1 1 RC3_TRIM 1102.000000000000000000 9 1 1 RC4_DZ 10.000000000000000000 9 1 1 RC4_MAX 1897.000000000000000000 9 1 1 RC4_MIN 1103.000000000000000000 9 1 1 RC4_REV -1.000000000000000000 9 1 1 RC4_TRIM 1499.000000000000000000 9 1 1 RC5_DZ 10.000000000000000000 9 1 1 RC5_MAX 1898.000000000000000000 9 1 1 RC5_MIN 1102.000000000000000000 9 1 1 RC5_REV 1.000000000000000000 9 1 1 RC5_TRIM 1500.000000000000000000 9 1 1 RC6_DZ 10.000000000000000000 9 1 1 RC6_MAX 1898.000000000000000000 9 1 1 RC6_MIN 1102.000000000000000000 9 1 1 RC6_REV 1.000000000000000000 9 1 1 RC6_TRIM 1500.000000000000000000 9 1 1 RC7_DZ 10.000000000000000000 9 1 1 RC7_MAX 2000.000000000000000000 9 1 1 RC7_MIN 1000.000000000000000000 9 1 1 RC7_REV 1.000000000000000000 9 1 1 RC7_TRIM 1500.000000000000000000 9 1 1 RC8_DZ 10.000000000000000000 9 1 1 RC8_MAX 2000.000000000000000000 9 1 1 RC8_MIN 1000.000000000000000000 9 1 1 RC8_REV 1.000000000000000000 9 1 1 RC8_TRIM 1500.000000000000000000 9 1 1 RC9_DZ 0.000000000000000000 9 1 1 RC9_MAX 2000.000000000000000000 9 1 1 RC9_MIN 1000.000000000000000000 9 1 1 RC9_REV 1.000000000000000000 9 1 1 RC9_TRIM 1500.000000000000000000 9 1 1 RC_ARMSWITCH_TH 0.750000000000000000 9 1 1 RC_CHAN_CNT 7 6 1 1 RC_ENG_MOT_TH 0.750000000000000000 9 1 1 RC_FAILS_THR 0 6 1 1 RC_GEAR_TH 0.750000000000000000 9 1 1 RC_INPUT_PROTO 3 6 1 1 RC_KILLSWITCH_TH 0.750000000000000000 9 1 1 RC_LOITER_TH 0.750000000000000000 9 1 1 RC_MAP_ACRO_SW 0 6 1 1 RC_MAP_ARM_SW 0 6 1 1 RC_MAP_AUX1 0 6 1 1 RC_MAP_AUX2 0 6 1 1 RC_MAP_AUX3 0 6 1 1 RC_MAP_AUX4 0 6 1 1 RC_MAP_AUX5 0 6 1 1 RC_MAP_AUX6 0 6 1 1 RC_MAP_ENG_MOT 0 6 1 1 RC_MAP_FAILSAFE 0 6 1 1 RC_MAP_FLAPS 0 6 1 1 RC_MAP_FLTMODE 5 6 1 1 RC_MAP_FLTM_BTN 0 6 1 1 RC_MAP_GEAR_SW 0 6 1 1 RC_MAP_KILL_SW 6 6 1 1 RC_MAP_LOITER_SW 0 6 1 1 RC_MAP_MAN_SW 0 6 1 1 RC_MAP_MODE_SW 0 6 1 1 RC_MAP_OFFB_SW 0 6 1 1 RC_MAP_PARAM1 0 6 1 1 RC_MAP_PARAM2 0 6 1 1 RC_MAP_PARAM3 0 6 1 1 RC_MAP_PITCH 2 6 1 1 RC_MAP_POSCTL_SW 0 6 1 1 RC_MAP_RATT_SW 0 6 1 1 RC_MAP_RETURN_SW 0 6 1 1 RC_MAP_ROLL 1 6 1 1 RC_MAP_STAB_SW 0 6 1 1 RC_MAP_THROTTLE 3 6 1 1 RC_MAP_TRANS_SW 0 6 1 1 RC_MAP_YAW 4 6 1 1 RC_OFFB_TH 0.750000000000000000 9 1 1 RC_PORT_CONFIG 0 6 1 1 RC_RETURN_TH 0.750000000000000000 9 1 1 RC_RSSI_PWM_CHAN 0 6 1 1 RC_RSSI_PWM_MAX 2000 6 1 1 RC_RSSI_PWM_MIN 1000 6 1 1 RC_TRANS_TH 0.750000000000000000 9 1 1 RTL_CONE_ANG 45 6 1 1 RTL_DESCEND_ALT 15.000000000000000000 9 1 1 RTL_HDG_MD 0 6 1 1 RTL_LAND_DELAY 1.000000000000000000 9 1 1 RTL_LOITER_RAD 80.000000000000000000 9 1 1 RTL_MIN_DIST 10.000000000000000000 9 1 1 RTL_PLD_MD 0 6 1 1 RTL_RETURN_ALT 15.000000000000000000 9 1 1 RTL_TIME_FACTOR 1.100000023841857910 9 1 1 RTL_TIME_MARGIN 100 6 1 1 RTL_TYPE 0 6 1 1 SDLOG_BOOT_BAT 0 6 1 1 SDLOG_DIRS_MAX 0 6 1 1 SDLOG_MISSION 0 6 1 1 SDLOG_MODE 0 6 1 1 SDLOG_PROFILE 1 6 1 1 SDLOG_UTC_OFFSET 0 6 1 1 SDLOG_UUID 1 6 1 1 SENS_BARO_QNH 1013.250000000000000000 9 1 1 SENS_BARO_RATE 20.000000000000000000 9 1 1 SENS_BOARD_ROT 0 6 1 1 SENS_BOARD_X_OFF 0.082520216703414917 9 1 1 SENS_BOARD_Y_OFF 0.260665357112884521 9 1 1 SENS_BOARD_Z_OFF 0.000000000000000000 9 1 1 SENS_CM8JL65_CFG 0 6 1 1 SENS_DPRES_OFF 0.000000000000000000 9 1 1 SENS_EN_BATT 0 6 1 1 SENS_EN_IRLOCK 0 6 1 1 SENS_EN_LL40LS 0 6 1 1 SENS_EN_MB12XX 0 6 1 1 SENS_EN_MPDT 0 6 1 1 SENS_EN_MS4525DO 0 6 1 1 SENS_EN_MS5525DS 0 6 1 1 SENS_EN_PAA3905 0 6 1 1 SENS_EN_PAW3902 0 6 1 1 SENS_EN_PGA460 0 6 1 1 SENS_EN_PMW3901 0 6 1 1 SENS_EN_PX4FLOW 0 6 1 1 SENS_EN_SDP3X 0 6 1 1 SENS_EN_SF1XX 0 6 1 1 SENS_EN_TF02PRO 0 6 1 1 SENS_EN_THERMAL -1 6 1 1 SENS_EN_TRANGER 0 6 1 1 SENS_EN_VL53L0X 0 6 1 1 SENS_EN_VL53L1X 0 6 1 1 SENS_EXT_I2C_PRB 1 6 1 1 SENS_IMU_AUTOCAL 0 6 1 1 SENS_IMU_MODE 0 6 1 1 SENS_LEDDAR1_CFG 0 6 1 1 SENS_MAG_MODE 0 6 1 1 SENS_SF0X_CFG 0 6 1 1 SENS_TFLOW_CFG 0 6 1 1 SENS_TFMINI_CFG 0 6 1 1 SENS_ULAND_CFG 0 6 1 1 SER_GPS1_BAUD 0 6 1 1 SER_TEL1_BAUD 921600 6 1 1 SYS_AUTOCONFIG 0 6 1 1 SYS_AUTOSTART 4001 6 1 1 SYS_CAL_ACCEL 0 6 1 1 SYS_CAL_BARO 0 6 1 1 SYS_CAL_GYRO 0 6 1 1 SYS_CAL_TDEL 24 6 1 1 SYS_CAL_TMAX 10 6 1 1 SYS_CAL_TMIN 5 6 1 1 SYS_DM_BACKEND 0 6 1 1 SYS_FAC_CAL_MODE 0 6 1 1 SYS_FAILURE_EN 0 6 1 1 SYS_HAS_BARO 1 6 1 1 SYS_HAS_GPS 0 6 1 1 SYS_HAS_MAG 0 6 1 1 SYS_HAS_NUM_DIST 0 6 1 1 SYS_HITL 0 6 1 1 SYS_MC_EST_GROUP 2 6 1 1 SYS_RGB_MAXBRT 1.000000000000000000 9 1 1 SYS_STCK_EN 1 6 1 1 SYS_VEHICLE_RESP -0.400000005960464478 9 1 1 TC_A_ENABLE 0 6 1 1 TC_B_ENABLE 0 6 1 1 TC_G_ENABLE 0 6 1 1 TEL_BST_EN 0 6 1 1 TEL_FRSKY_CONFIG 0 6 1 1 TEL_HOTT_CONFIG 0 6 1 1 THR_MDL_FAC 0.730000019073486328 9 1 1 TRIG_MODE 0 6 1 1 VOXL_ESC_BAUD 250000 6 1 1 VOXL_ESC_CONFIG 1 6 1 1 VOXL_ESC_FUNC1 0 6 1 1 VOXL_ESC_FUNC2 0 6 1 1 VOXL_ESC_FUNC3 0 6 1 1 VOXL_ESC_FUNC4 0 6 1 1 VOXL_ESC_MODE 0 6 1 1 VOXL_ESC_PUB_BST 1 6 1 1 VOXL_ESC_REV 0 6 1 1 VOXL_ESC_RPM_MAX 15000 6 1 1 VOXL_ESC_RPM_MIN 5500 6 1 1 VOXL_ESC_SDIR1 0 6 1 1 VOXL_ESC_SDIR2 0 6 1 1 VOXL_ESC_SDIR3 0 6 1 1 VOXL_ESC_SDIR4 0 6 1 1 VOXL_ESC_T_COSP 0.990000009536743164 9 1 1 VOXL_ESC_T_DEAD 20 6 1 1 VOXL_ESC_T_EXPO 35 6 1 1 VOXL_ESC_T_MINF 0.150000005960464478 9 1 1 VOXL_ESC_T_PERC 90 6 1 1 VOXL_ESC_VLOG 0 6 1 1 VTO_LOITER_ALT 80.000000000000000000 9 1 1 VT_B_DEC_MSS 2.000000000000000000 9 1 1 WV_EN 0 6 1 1 WV_GAIN 1.000000000000000000 9 1 1 WV_ROLL_MIN 1.000000000000000000 9 1 1 WV_YRATE_MAX 90.000000000000000000 9 1 1 XRCE_DDS_CFG 0 6 -
Default px4 parameter list.
# Onboard parameters for Vehicle 1 # # Stack: PX4 Pro # Vehicle: Multi-Rotor # Version: 1.14.0 dev # Git Revision: b02a6b4ae902003f # # Vehicle-Id Component-Id Name Value Type 1 1 ASPD_SCALE_1 1.000000000000000000 9 1 1 BAT1_CAPACITY 3000.000000000000000000 9 1 1 BAT1_N_CELLS 4 6 1 1 BAT1_R_INTERNAL 0.008000000379979610 9 1 1 BAT1_SOURCE 0 6 1 1 BAT1_V_CHARGED 4.150000095367431641 9 1 1 BAT1_V_EMPTY 3.599999904632568359 9 1 1 BAT1_V_LOAD_DROP 0.100000001490116119 9 1 1 BAT_AVRG_CURRENT 15.000000000000000000 9 1 1 BAT_CRIT_THR 0.250000000000000000 9 1 1 BAT_EMERGEN_THR 0.100000001490116119 9 1 1 BAT_LOW_THR 0.300000011920928955 9 1 1 BAT_N_CELLS 4 6 1 1 BAT_V_CHARGED 4.150000095367431641 9 1 1 BAT_V_EMPTY 3.599999904632568359 9 1 1 BAT_V_LOAD_DROP 0.300000011920928955 9 1 1 CAL_ACC0_ID 2490378 6 1 1 CAL_ACC0_PRIO 50 6 1 1 CAL_ACC0_ROT -1 6 1 1 CAL_ACC0_XOFF 0.000000000000000000 9 1 1 CAL_ACC0_XSCALE 1.000000000000000000 9 1 1 CAL_ACC0_YOFF 0.000000000000000000 9 1 1 CAL_ACC0_YSCALE 1.000000000000000000 9 1 1 CAL_ACC0_ZOFF 0.000000000000000000 9 1 1 CAL_ACC0_ZSCALE 1.000000000000000000 9 1 1 CAL_ACC1_ID 2490386 6 1 1 CAL_ACC1_PRIO 50 6 1 1 CAL_ACC1_ROT -1 6 1 1 CAL_ACC1_XOFF 0.000000000000000000 9 1 1 CAL_ACC1_XSCALE 1.000000000000000000 9 1 1 CAL_ACC1_YOFF 0.000000000000000000 9 1 1 CAL_ACC1_YSCALE 1.000000000000000000 9 1 1 CAL_ACC1_ZOFF 0.000000000000000000 9 1 1 CAL_ACC1_ZSCALE 1.000000000000000000 9 1 1 CAL_ACC2_ID 0 6 1 1 CAL_ACC3_ID 0 6 1 1 CAL_AIR_CMODEL 0 6 1 1 CAL_AIR_TUBED_MM 1.500000000000000000 9 1 1 CAL_AIR_TUBELEN 0.200000002980232239 9 1 1 CAL_BARO0_ID 0 6 1 1 CAL_BARO1_ID 0 6 1 1 CAL_BARO2_ID 0 6 1 1 CAL_BARO3_ID 0 6 1 1 CAL_GYRO0_ID 2490378 6 1 1 CAL_GYRO0_PRIO 50 6 1 1 CAL_GYRO0_ROT -1 6 1 1 CAL_GYRO0_XOFF -0.007948651909828186 9 1 1 CAL_GYRO0_YOFF 0.006882027722895145 9 1 1 CAL_GYRO0_ZOFF 0.005271935835480690 9 1 1 CAL_GYRO1_ID 2490386 6 1 1 CAL_GYRO1_PRIO 50 6 1 1 CAL_GYRO1_ROT -1 6 1 1 CAL_GYRO1_XOFF -0.014327573589980602 9 1 1 CAL_GYRO1_YOFF 0.010455547831952572 9 1 1 CAL_GYRO1_ZOFF 0.001255361014045775 9 1 1 CAL_GYRO2_ID 0 6 1 1 CAL_GYRO3_ID 0 6 1 1 CAL_MAG0_ID 396809 6 1 1 CAL_MAG0_PRIO 75 6 1 1 CAL_MAG0_ROT 10 6 1 1 CAL_MAG0_XCOMP 0.000000000000000000 9 1 1 CAL_MAG0_XODIAG 0.000000000000000000 9 1 1 CAL_MAG0_XOFF 0.000000000000000000 9 1 1 CAL_MAG0_XSCALE 1.000000000000000000 9 1 1 CAL_MAG0_YCOMP 0.000000000000000000 9 1 1 CAL_MAG0_YODIAG 0.000000000000000000 9 1 1 CAL_MAG0_YOFF 0.000000000000000000 9 1 1 CAL_MAG0_YSCALE 1.000000000000000000 9 1 1 CAL_MAG0_ZCOMP 0.000000000000000000 9 1 1 CAL_MAG0_ZODIAG 0.000000000000000000 9 1 1 CAL_MAG0_ZOFF 0.000000000000000000 9 1 1 CAL_MAG0_ZSCALE 1.000000000000000000 9 1 1 CAL_MAG1_ID 0 6 1 1 CAL_MAG1_ROT -1 6 1 1 CAL_MAG2_ID 0 6 1 1 CAL_MAG2_ROT -1 6 1 1 CAL_MAG3_ID 0 6 1 1 CAL_MAG3_ROT -1 6 1 1 CAM_CAP_FBACK 0 6 1 1 CA_AIRFRAME 0 6 1 1 CA_FAILURE_MODE 0 6 1 1 CA_METHOD 2 6 1 1 CA_R0_SLEW 0.000000000000000000 9 1 1 CA_R10_SLEW 0.000000000000000000 9 1 1 CA_R11_SLEW 0.000000000000000000 9 1 1 CA_R1_SLEW 0.000000000000000000 9 1 1 CA_R2_SLEW 0.000000000000000000 9 1 1 CA_R3_SLEW 0.000000000000000000 9 1 1 CA_R4_SLEW 0.000000000000000000 9 1 1 CA_R5_SLEW 0.000000000000000000 9 1 1 CA_R6_SLEW 0.000000000000000000 9 1 1 CA_R7_SLEW 0.000000000000000000 9 1 1 CA_R8_SLEW 0.000000000000000000 9 1 1 CA_R9_SLEW 0.000000000000000000 9 1 1 CA_ROTOR0_AX 0.000000000000000000 9 1 1 CA_ROTOR0_AY 0.000000000000000000 9 1 1 CA_ROTOR0_AZ -1.000000000000000000 9 1 1 CA_ROTOR0_CT 6.500000000000000000 9 1 1 CA_ROTOR0_KM 0.050000000745058060 9 1 1 CA_ROTOR0_PX 0.150000005960464478 9 1 1 CA_ROTOR0_PY 0.150000005960464478 9 1 1 CA_ROTOR0_PZ 0.000000000000000000 9 1 1 CA_ROTOR10_AX 0.000000000000000000 9 1 1 CA_ROTOR10_AY 0.000000000000000000 9 1 1 CA_ROTOR10_AZ -1.000000000000000000 9 1 1 CA_ROTOR10_CT 6.500000000000000000 9 1 1 CA_ROTOR10_KM 0.050000000745058060 9 1 1 CA_ROTOR10_PX 0.000000000000000000 9 1 1 CA_ROTOR10_PY 0.000000000000000000 9 1 1 CA_ROTOR10_PZ 0.000000000000000000 9 1 1 CA_ROTOR11_AX 0.000000000000000000 9 1 1 CA_ROTOR11_AY 0.000000000000000000 9 1 1 CA_ROTOR11_AZ -1.000000000000000000 9 1 1 CA_ROTOR11_CT 6.500000000000000000 9 1 1 CA_ROTOR11_KM 0.050000000745058060 9 1 1 CA_ROTOR11_PX 0.000000000000000000 9 1 1 CA_ROTOR11_PY 0.000000000000000000 9 1 1 CA_ROTOR11_PZ 0.000000000000000000 9 1 1 CA_ROTOR1_AX 0.000000000000000000 9 1 1 CA_ROTOR1_AY 0.000000000000000000 9 1 1 CA_ROTOR1_AZ -1.000000000000000000 9 1 1 CA_ROTOR1_CT 6.500000000000000000 9 1 1 CA_ROTOR1_KM 0.050000000745058060 9 1 1 CA_ROTOR1_PX -0.150000005960464478 9 1 1 CA_ROTOR1_PY -0.150000005960464478 9 1 1 CA_ROTOR1_PZ 0.000000000000000000 9 1 1 CA_ROTOR2_AX 0.000000000000000000 9 1 1 CA_ROTOR2_AY 0.000000000000000000 9 1 1 CA_ROTOR2_AZ -1.000000000000000000 9 1 1 CA_ROTOR2_CT 6.500000000000000000 9 1 1 CA_ROTOR2_KM -0.050000000745058060 9 1 1 CA_ROTOR2_PX 0.150000005960464478 9 1 1 CA_ROTOR2_PY -0.150000005960464478 9 1 1 CA_ROTOR2_PZ 0.000000000000000000 9 1 1 CA_ROTOR3_AX 0.000000000000000000 9 1 1 CA_ROTOR3_AY 0.000000000000000000 9 1 1 CA_ROTOR3_AZ -1.000000000000000000 9 1 1 CA_ROTOR3_CT 6.500000000000000000 9 1 1 CA_ROTOR3_KM -0.050000000745058060 9 1 1 CA_ROTOR3_PX -0.150000005960464478 9 1 1 CA_ROTOR3_PY 0.150000005960464478 9 1 1 CA_ROTOR3_PZ 0.000000000000000000 9 1 1 CA_ROTOR4_AX 0.000000000000000000 9 1 1 CA_ROTOR4_AY 0.000000000000000000 9 1 1 CA_ROTOR4_AZ -1.000000000000000000 9 1 1 CA_ROTOR4_CT 6.500000000000000000 9 1 1 CA_ROTOR4_KM 0.050000000745058060 9 1 1 CA_ROTOR4_PX 0.000000000000000000 9 1 1 CA_ROTOR4_PY 0.000000000000000000 9 1 1 CA_ROTOR4_PZ 0.000000000000000000 9 1 1 CA_ROTOR5_AX 0.000000000000000000 9 1 1 CA_ROTOR5_AY 0.000000000000000000 9 1 1 CA_ROTOR5_AZ -1.000000000000000000 9 1 1 CA_ROTOR5_CT 6.500000000000000000 9 1 1 CA_ROTOR5_KM 0.050000000745058060 9 1 1 CA_ROTOR5_PX 0.000000000000000000 9 1 1 CA_ROTOR5_PY 0.000000000000000000 9 1 1 CA_ROTOR5_PZ 0.000000000000000000 9 1 1 CA_ROTOR6_AX 0.000000000000000000 9 1 1 CA_ROTOR6_AY 0.000000000000000000 9 1 1 CA_ROTOR6_AZ -1.000000000000000000 9 1 1 CA_ROTOR6_CT 6.500000000000000000 9 1 1 CA_ROTOR6_KM 0.050000000745058060 9 1 1 CA_ROTOR6_PX 0.000000000000000000 9 1 1 CA_ROTOR6_PY 0.000000000000000000 9 1 1 CA_ROTOR6_PZ 0.000000000000000000 9 1 1 CA_ROTOR7_AX 0.000000000000000000 9 1 1 CA_ROTOR7_AY 0.000000000000000000 9 1 1 CA_ROTOR7_AZ -1.000000000000000000 9 1 1 CA_ROTOR7_CT 6.500000000000000000 9 1 1 CA_ROTOR7_KM 0.050000000745058060 9 1 1 CA_ROTOR7_PX 0.000000000000000000 9 1 1 CA_ROTOR7_PY 0.000000000000000000 9 1 1 CA_ROTOR7_PZ 0.000000000000000000 9 1 1 CA_ROTOR8_AX 0.000000000000000000 9 1 1 CA_ROTOR8_AY 0.000000000000000000 9 1 1 CA_ROTOR8_AZ -1.000000000000000000 9 1 1 CA_ROTOR8_CT 6.500000000000000000 9 1 1 CA_ROTOR8_KM 0.050000000745058060 9 1 1 CA_ROTOR8_PX 0.000000000000000000 9 1 1 CA_ROTOR8_PY 0.000000000000000000 9 1 1 CA_ROTOR8_PZ 0.000000000000000000 9 1 1 CA_ROTOR9_AX 0.000000000000000000 9 1 1 CA_ROTOR9_AY 0.000000000000000000 9 1 1 CA_ROTOR9_AZ -1.000000000000000000 9 1 1 CA_ROTOR9_CT 6.500000000000000000 9 1 1 CA_ROTOR9_KM 0.050000000745058060 9 1 1 CA_ROTOR9_PX 0.000000000000000000 9 1 1 CA_ROTOR9_PY 0.000000000000000000 9 1 1 CA_ROTOR9_PZ 0.000000000000000000 9 1 1 CA_ROTOR_COUNT 4 6 1 1 CA_R_REV 0 6 1 1 CA_SV0_SLEW 0.000000000000000000 9 1 1 CA_SV1_SLEW 0.000000000000000000 9 1 1 CA_SV2_SLEW 0.000000000000000000 9 1 1 CA_SV3_SLEW 0.000000000000000000 9 1 1 CA_SV4_SLEW 0.000000000000000000 9 1 1 CA_SV5_SLEW 0.000000000000000000 9 1 1 CA_SV6_SLEW 0.000000000000000000 9 1 1 CA_SV7_SLEW 0.000000000000000000 9 1 1 CBRK_AIRSPD_CHK 0 6 1 1 CBRK_BUZZER 0 6 1 1 CBRK_FLIGHTTERM 121212 6 1 1 CBRK_IO_SAFETY 22027 6 1 1 CBRK_SUPPLY_CHK 0 6 1 1 CBRK_USB_CHK 197848 6 1 1 CBRK_VTOLARMING 0 6 1 1 COM_ACT_FAIL_ACT 0 6 1 1 COM_ARM_ARSP_EN 1 6 1 1 COM_ARM_AUTH_ID 10 6 1 1 COM_ARM_AUTH_MET 0 6 1 1 COM_ARM_AUTH_REQ 0 6 1 1 COM_ARM_AUTH_TO 1.000000000000000000 9 1 1 COM_ARM_BAD_INOV 0 6 1 1 COM_ARM_CHK_ESCS 0 6 1 1 COM_ARM_EKF_BIAS 3.000000000000000000 9 1 1 COM_ARM_EKF_HGT 1.000000000000000000 9 1 1 COM_ARM_EKF_POS 0.500000000000000000 9 1 1 COM_ARM_EKF_VEL 0.500000000000000000 9 1 1 COM_ARM_EKF_YAW 0.500000000000000000 9 1 1 COM_ARM_HFLT_CHK 1 6 1 1 COM_ARM_IMU_ACC 0.699999988079071045 9 1 1 COM_ARM_IMU_GYR 0.250000000000000000 9 1 1 COM_ARM_MAG_ANG 60 6 1 1 COM_ARM_MAG_STR 2 6 1 1 COM_ARM_MIS_REQ 0 6 1 1 COM_ARM_ODID 0 6 1 1 COM_ARM_SDCARD 1 6 1 1 COM_ARM_SWISBTN 0 6 1 1 COM_ARM_WO_GPS 1 6 1 1 COM_CPU_MAX 95.000000000000000000 9 1 1 COM_DISARM_FORCE 0 6 1 1 COM_DISARM_LAND 0.100000001490116119 9 1 1 COM_DISARM_PRFLT 20.000000000000000000 9 1 1 COM_DL_LOSS_T 10 6 1 1 COM_FAIL_ACT_T 5.000000000000000000 9 1 1 COM_FLIGHT_UUID 0 6 1 1 COM_FLTMODE1 1 6 1 1 COM_FLTMODE2 0 6 1 1 COM_FLTMODE3 0 6 1 1 COM_FLTMODE4 2 6 1 1 COM_FLTMODE5 0 6 1 1 COM_FLTMODE6 7 6 1 1 COM_FLT_PROFILE 0 6 1 1 COM_FLT_TIME_MAX -1 6 1 1 COM_FORCE_SAFETY 0 6 1 1 COM_HLDL_LOSS_T 120 6 1 1 COM_HLDL_REG_T 0 6 1 1 COM_HOME_EN 1 6 1 1 COM_HOME_IN_AIR 0 6 1 1 COM_IMB_PROP_ACT 0 6 1 1 COM_KILL_DISARM 5.000000000000000000 9 1 1 COM_LKDOWN_TKO 3.000000000000000000 9 1 1 COM_LOW_BAT_ACT 0 6 1 1 COM_MOT_TEST_EN 1 6 1 1 COM_OBC_LOSS_T 5.000000000000000000 9 1 1 COM_OBL_RC_ACT 0 6 1 1 COM_OBS_AVOID 0 6 1 1 COM_OF_LOSS_T 1.000000000000000000 9 1 1 COM_PARACHUTE 0 6 1 1 COM_POSCTL_NAVL 0 6 1 1 COM_POS_FS_DELAY 1 6 1 1 COM_POS_FS_EPH 5.000000000000000000 9 1 1 COM_POS_LOW_EPH -1.000000000000000000 9 1 1 COM_POWER_COUNT 1 6 1 1 COM_PREARM_MODE 0 6 1 1 COM_QC_ACT 0 6 1 1 COM_RCL_EXCEPT 0 6 1 1 COM_RC_ARM_HYST 1000 6 1 1 COM_RC_IN_MODE 3 6 1 1 COM_RC_LOSS_T 0.500000000000000000 9 1 1 COM_RC_OVERRIDE 1 6 1 1 COM_RC_STICK_OV 30.000000000000000000 9 1 1 COM_SPOOLUP_TIME 1.000000000000000000 9 1 1 COM_TAKEOFF_ACT 0 6 1 1 COM_VEL_FS_EVH 1.000000000000000000 9 1 1 COM_WIND_MAX -1.000000000000000000 9 1 1 COM_WIND_WARN -1.000000000000000000 9 1 1 CP_DELAY 0.400000005960464478 9 1 1 CP_DIST 1.000000000000000000 9 1 1 CP_GO_NO_DATA 1 6 1 1 CP_GUIDE_ANG 0.000000000000000000 9 1 1 DSHOT_3D_DEAD_H 1000 6 1 1 DSHOT_3D_DEAD_L 1000 6 1 1 DSHOT_3D_ENABLE 0 6 1 1 DSHOT_MIN 0.054999999701976776 9 1 1 DSHOT_TEL_CFG 0 6 1 1 EKF2_ABIAS_INIT 0.200000002980232239 9 1 1 EKF2_ABL_ACCLIM 25.000000000000000000 9 1 1 EKF2_ABL_GYRLIM 3.000000000000000000 9 1 1 EKF2_ABL_LIM 0.400000005960464478 9 1 1 EKF2_ABL_TAU 0.500000000000000000 9 1 1 EKF2_ACC_B_NOISE 0.003000000026077032 9 1 1 EKF2_ACC_NOISE 0.349999994039535522 9 1 1 EKF2_AID_MASK 0 6 1 1 EKF2_ANGERR_INIT 0.100000001490116119 9 1 1 EKF2_ARSP_THR 0.000000000000000000 9 1 1 EKF2_ASPD_MAX 20.000000000000000000 9 1 1 EKF2_ASP_DELAY 100.000000000000000000 9 1 1 EKF2_AVEL_DELAY 5.000000000000000000 9 1 1 EKF2_BARO_CTRL 1 6 1 1 EKF2_BARO_DELAY 0.000000000000000000 9 1 1 EKF2_BARO_GATE 5.000000000000000000 9 1 1 EKF2_BARO_NOISE 3.500000000000000000 9 1 1 EKF2_BCOEF_X 100.000000000000000000 9 1 1 EKF2_BCOEF_Y 100.000000000000000000 9 1 1 EKF2_BETA_GATE 5.000000000000000000 9 1 1 EKF2_BETA_NOISE 0.300000011920928955 9 1 1 EKF2_DECL_TYPE 7 6 1 1 EKF2_DRAG_CTRL 0 6 1 1 EKF2_DRAG_NOISE 2.500000000000000000 9 1 1 EKF2_EAS_NOISE 1.399999976158142090 9 1 1 EKF2_EVA_NOISE 0.100000001490116119 9 1 1 EKF2_EVP_GATE 5.000000000000000000 9 1 1 EKF2_EVP_NOISE 0.100000001490116119 9 1 1 EKF2_EVV_GATE 3.000000000000000000 9 1 1 EKF2_EVV_NOISE 0.100000001490116119 9 1 1 EKF2_EV_CTRL 15 6 1 1 EKF2_EV_DELAY 0.000000000000000000 9 1 1 EKF2_EV_HGT_TO 5000 6 1 1 EKF2_EV_NOISE_MD 0 6 1 1 EKF2_EV_POS_TO 1000 6 1 1 EKF2_EV_POS_X 0.000000000000000000 9 1 1 EKF2_EV_POS_Y 0.000000000000000000 9 1 1 EKF2_EV_POS_Z 0.000000000000000000 9 1 1 EKF2_EV_QMIN 0 6 1 1 EKF2_FUSE_BETA 0 6 1 1 EKF2_GBIAS_INIT 0.100000001490116119 9 1 1 EKF2_GND_EFF_DZ 4.000000000000000000 9 1 1 EKF2_GND_MAX_HGT 0.500000000000000000 9 1 1 EKF2_GPS_CHECK 245 6 1 1 EKF2_GPS_CTRL 7 6 1 1 EKF2_GPS_DELAY 110.000000000000000000 9 1 1 EKF2_GPS_POS_X 0.000000000000000000 9 1 1 EKF2_GPS_POS_Y 0.000000000000000000 9 1 1 EKF2_GPS_POS_Z 0.000000000000000000 9 1 1 EKF2_GPS_P_GATE 5.000000000000000000 9 1 1 EKF2_GPS_P_NOISE 0.500000000000000000 9 1 1 EKF2_GPS_V_GATE 5.000000000000000000 9 1 1 EKF2_GPS_V_NOISE 0.300000011920928955 9 1 1 EKF2_GRAV_NOISE 1.000000000000000000 9 1 1 EKF2_GSF_TAS 15.000000000000000000 9 1 1 EKF2_GYR_B_LIM 0.150000005960464478 9 1 1 EKF2_GYR_B_NOISE 0.001000000047497451 9 1 1 EKF2_GYR_NOISE 0.014999999664723873 9 1 1 EKF2_HDG_GATE 2.599999904632568359 9 1 1 EKF2_HEAD_NOISE 0.300000011920928955 9 1 1 EKF2_HGT_REF 3 6 1 1 EKF2_IMU_CTRL 3 6 1 1 EKF2_IMU_POS_X -0.028000000864267349 9 1 1 EKF2_IMU_POS_Y -0.004000000189989805 9 1 1 EKF2_IMU_POS_Z -0.008000000379979610 9 1 1 EKF2_MAG_ACCLIM 0.500000000000000000 9 1 1 EKF2_MAG_B_NOISE 0.000099999997473788 9 1 1 EKF2_MAG_CHECK 1 6 1 1 EKF2_MAG_DECL 0.000000000000000000 9 1 1 EKF2_MAG_DELAY 0.000000000000000000 9 1 1 EKF2_MAG_E_NOISE 0.001000000047497451 9 1 1 EKF2_MAG_GATE 3.000000000000000000 9 1 1 EKF2_MAG_NOISE 0.050000000745058060 9 1 1 EKF2_MAG_TYPE 5 6 1 1 EKF2_MAG_YAWLIM 0.200000002980232239 9 1 1 EKF2_MCOEF 0.150000005960464478 9 1 1 EKF2_MIN_RNG 0.100000001490116119 9 1 1 EKF2_MULTI_IMU 3 6 1 1 EKF2_MULTI_MAG 3 6 1 1 EKF2_NOAID_NOISE 10.000000000000000000 9 1 1 EKF2_NOAID_TOUT 5000000 6 1 1 EKF2_OF_CTRL 0 6 1 1 EKF2_OF_DELAY 20.000000000000000000 9 1 1 EKF2_OF_GATE 3.000000000000000000 9 1 1 EKF2_OF_N_MAX 0.500000000000000000 9 1 1 EKF2_OF_N_MIN 0.150000005960464478 9 1 1 EKF2_OF_POS_X 0.000000000000000000 9 1 1 EKF2_OF_POS_Y 0.000000000000000000 9 1 1 EKF2_OF_POS_Z 0.000000000000000000 9 1 1 EKF2_OF_QMIN 1 6 1 1 EKF2_PCOEF_XN 0.000000000000000000 9 1 1 EKF2_PCOEF_XP 0.000000000000000000 9 1 1 EKF2_PCOEF_YN 0.000000000000000000 9 1 1 EKF2_PCOEF_YP 0.000000000000000000 9 1 1 EKF2_PCOEF_Z 0.000000000000000000 9 1 1 EKF2_PREDICT_US 10000 6 1 1 EKF2_REQ_EPH 3.000000000000000000 9 1 1 EKF2_REQ_EPV 5.000000000000000000 9 1 1 EKF2_REQ_GPS_H 10.000000000000000000 9 1 1 EKF2_REQ_HDRIFT 0.100000001490116119 9 1 1 EKF2_REQ_NSATS 6 6 1 1 EKF2_REQ_PDOP 2.500000000000000000 9 1 1 EKF2_REQ_SACC 1.000000000000000000 9 1 1 EKF2_REQ_VDRIFT 0.200000002980232239 9 1 1 EKF2_RNG_A_HMAX 5.000000000000000000 9 1 1 EKF2_RNG_A_IGATE 1.000000000000000000 9 1 1 EKF2_RNG_A_VMAX 1.000000000000000000 9 1 1 EKF2_RNG_CTRL 1 6 1 1 EKF2_RNG_DELAY 5.000000000000000000 9 1 1 EKF2_RNG_GATE 5.000000000000000000 9 1 1 EKF2_RNG_K_GATE 1.000000000000000000 9 1 1 EKF2_RNG_NOISE 0.100000001490116119 9 1 1 EKF2_RNG_PITCH 0.000000000000000000 9 1 1 EKF2_RNG_POS_X 0.000000000000000000 9 1 1 EKF2_RNG_POS_Y 0.000000000000000000 9 1 1 EKF2_RNG_POS_Z 0.000000000000000000 9 1 1 EKF2_RNG_QLTY_T 1.000000000000000000 9 1 1 EKF2_RNG_SFE 0.050000000745058060 9 1 1 EKF2_SEL_ERR_RED 0.200000002980232239 9 1 1 EKF2_SEL_IMU_ACC 1.000000000000000000 9 1 1 EKF2_SEL_IMU_ANG 15.000000000000000000 9 1 1 EKF2_SEL_IMU_RAT 7.000000000000000000 9 1 1 EKF2_SEL_IMU_VEL 2.000000000000000000 9 1 1 EKF2_SYNT_MAG_Z 0 6 1 1 EKF2_TAS_GATE 3.000000000000000000 9 1 1 EKF2_TAU_POS 0.250000000000000000 9 1 1 EKF2_TAU_VEL 0.250000000000000000 9 1 1 EKF2_TERR_GRAD 0.500000000000000000 9 1 1 EKF2_TERR_MASK 3 6 1 1 EKF2_TERR_NOISE 5.000000000000000000 9 1 1 EKF2_WIND_NSD 0.009999999776482582 9 1 1 EV_TSK_RC_LOSS 0 6 1 1 EV_TSK_STAT_DIS 0 6 1 1 FD_ACT_EN 1 6 1 1 FD_ACT_MOT_C2T 2.000000000000000000 9 1 1 FD_ACT_MOT_THR 0.200000002980232239 9 1 1 FD_ACT_MOT_TOUT 100 6 1 1 FD_ESCS_EN 1 6 1 1 FD_EXT_ATS_EN 0 6 1 1 FD_EXT_ATS_TRIG 1900 6 1 1 FD_FAIL_P 60 6 1 1 FD_FAIL_P_TTRI 0.300000011920928955 9 1 1 FD_FAIL_R 60 6 1 1 FD_FAIL_R_TTRI 0.300000011920928955 9 1 1 FD_IMB_PROP_THR 30 6 1 1 FLW_TGT_ALT_M 0 6 1 1 FLW_TGT_DST 8.000000000000000000 9 1 1 FLW_TGT_FA 180.000000000000000000 9 1 1 FLW_TGT_HT 8.000000000000000000 9 1 1 FLW_TGT_MAX_VEL 5.000000000000000000 9 1 1 FLW_TGT_RS 0.100000001490116119 9 1 1 FW_AIRSPD_MAX 20.000000000000000000 9 1 1 FW_AIRSPD_TRIM 15.000000000000000000 9 1 1 FW_ARSP_MODE 0 6 1 1 FW_PSP_OFF 0.000000000000000000 9 1 1 FW_T_CLMB_R_SP 3.000000000000000000 9 1 1 FW_T_SINK_R_SP 2.000000000000000000 9 1 1 GF_ACTION 2 6 1 1 GF_ALTMODE 0 6 1 1 GF_COUNT -1 6 1 1 GF_MAX_HOR_DIST 0.000000000000000000 9 1 1 GF_MAX_VER_DIST 0.000000000000000000 9 1 1 GF_PREDICT 0 6 1 1 GF_SOURCE 0 6 1 1 GND_SPEED_THR_SC 1.000000000000000000 9 1 1 GPS_1_CONFIG 201 6 1 1 GPS_1_GNSS 0 6 1 1 GPS_1_PROTOCOL 1 6 1 1 GPS_2_CONFIG 0 6 1 1 GPS_DUMP_COMM 0 6 1 1 GPS_PITCH_OFFSET 0.000000000000000000 9 1 1 GPS_SAT_INFO 0 6 1 1 GPS_UBX_BAUD2 230400 6 1 1 GPS_UBX_CFG_INTF 0 6 1 1 GPS_UBX_DYNMODEL 6 6 1 1 GPS_UBX_MODE 0 6 1 1 GPS_YAW_OFFSET 0.000000000000000000 9 1 1 HTE_ACC_GATE 3.000000000000000000 9 1 1 HTE_HT_ERR_INIT 0.100000001490116119 9 1 1 HTE_HT_NOISE 0.003599999938160181 9 1 1 HTE_THR_RANGE 0.200000002980232239 9 1 1 HTE_VXY_THR 10.000000000000000000 9 1 1 HTE_VZ_THR 2.000000000000000000 9 1 1 IMU_ACCEL_CUTOFF 30.000000000000000000 9 1 1 IMU_DGYRO_CUTOFF 30.000000000000000000 9 1 1 IMU_GYRO_CAL_EN 1 6 1 1 IMU_GYRO_CUTOFF 30.000000000000000000 9 1 1 IMU_GYRO_DNF_BW 15.000000000000000000 9 1 1 IMU_GYRO_DNF_EN 0 6 1 1 IMU_GYRO_DNF_HMC 3 6 1 1 IMU_GYRO_DNF_MIN 25.000000000000000000 9 1 1 IMU_GYRO_FFT_EN 1 6 1 1 IMU_GYRO_FFT_LEN 512 6 1 1 IMU_GYRO_FFT_MAX 150.000000000000000000 9 1 1 IMU_GYRO_FFT_MIN 30.000000000000000000 9 1 1 IMU_GYRO_FFT_SNR 10.000000000000000000 9 1 1 IMU_GYRO_NF0_BW 30.000000000000000000 9 1 1 IMU_GYRO_NF0_FRQ 85.000000000000000000 9 1 1 IMU_GYRO_NF1_BW 20.000000000000000000 9 1 1 IMU_GYRO_NF1_FRQ 0.000000000000000000 9 1 1 IMU_GYRO_RATEMAX 800 6 1 1 IMU_INTEG_RATE 200 6 1 1 LNDMC_ALT_GND 2.000000000000000000 9 1 1 LNDMC_ALT_MAX -1.000000000000000000 9 1 1 LNDMC_ROT_MAX 30.000000000000000000 9 1 1 LNDMC_TRIG_TIME 1.000000000000000000 9 1 1 LNDMC_XY_VEL_MAX 1.500000000000000000 9 1 1 LNDMC_Z_VEL_MAX 0.250000000000000000 9 1 1 LND_FLIGHT_T_HI 0 6 1 1 LND_FLIGHT_T_LO 2075074960 6 1 1 MAN_ARM_GESTURE 1 6 1 1 MAV_0_CONFIG 0 6 1 1 MAV_1_CONFIG 101 6 1 1 MAV_1_FLOW_CTRL 2 6 1 1 MAV_1_FORWARD 0 6 1 1 MAV_1_MODE 2 6 1 1 MAV_1_RADIO_CTL 1 6 1 1 MAV_1_RATE 0 6 1 1 MAV_2_CONFIG 0 6 1 1 MAV_COMP_ID 1 6 1 1 MAV_FWDEXTSP 1 6 1 1 MAV_HASH_CHK_EN 1 6 1 1 MAV_HB_FORW_EN 1 6 1 1 MAV_PROTO_VER 0 6 1 1 MAV_RADIO_TOUT 5 6 1 1 MAV_SIK_RADIO_ID 0 6 1 1 MAV_SYS_ID 1 6 1 1 MAV_TYPE 2 6 1 1 MAV_USEHILGPS 0 6 1 1 MBE_ENABLE 1 6 1 1 MBE_LEARN_GAIN 18.000000000000000000 9 1 1 MC_ACRO_EXPO 0.689999997615814209 9 1 1 MC_ACRO_EXPO_Y 0.689999997615814209 9 1 1 MC_ACRO_P_MAX 720.000000000000000000 9 1 1 MC_ACRO_R_MAX 720.000000000000000000 9 1 1 MC_ACRO_SUPEXPO 0.699999988079071045 9 1 1 MC_ACRO_SUPEXPOY 0.699999988079071045 9 1 1 MC_ACRO_Y_MAX 540.000000000000000000 9 1 1 MC_AIRMODE 0 6 1 1 MC_AT_APPLY 1 6 1 1 MC_AT_AXES 3 6 1 1 MC_AT_EN 1 6 1 1 MC_AT_RISE_TIME 0.140000000596046448 9 1 1 MC_AT_START 0 6 1 1 MC_AT_SYSID_AMP 0.699999988079071045 9 1 1 MC_BAT_SCALE_EN 1 6 1 1 MC_INJECT_AMP 0.050000000745058060 9 1 1 MC_INJECT_CNT 0 6 1 1 MC_INJECT_EN 0 6 1 1 MC_INJECT_INC 1.000000000000000000 9 1 1 MC_INJECT_REST_T 1.000000000000000000 9 1 1 MC_INJECT_RPY 0 6 1 1 MC_INJECT_SINE_T 5.000000000000000000 9 1 1 MC_INJECT_START 3.000000000000000000 9 1 1 MC_MAN_TILT_TAU 0.000000000000000000 9 1 1 MC_ORBIT_RAD_MAX 1000.000000000000000000 9 1 1 MC_PITCHRATE_D 0.002640000078827143 9 1 1 MC_PITCHRATE_FF 0.000000000000000000 9 1 1 MC_PITCHRATE_I 0.229000002145767212 9 1 1 MC_PITCHRATE_K 1.000000000000000000 9 1 1 MC_PITCHRATE_MAX 220.000000000000000000 9 1 1 MC_PITCHRATE_P 0.130999997258186340 9 1 1 MC_PITCH_CUTOFF 0.000000000000000000 9 1 1 MC_PITCH_P 7.000000000000000000 9 1 1 MC_PR_INT_LIM 0.300000011920928955 9 1 1 MC_ROLLRATE_D 0.003349999897181988 9 1 1 MC_ROLLRATE_FF 0.000000000000000000 9 1 1 MC_ROLLRATE_I 0.259000003337860107 9 1 1 MC_ROLLRATE_K 1.000000000000000000 9 1 1 MC_ROLLRATE_MAX 220.000000000000000000 9 1 1 MC_ROLLRATE_P 0.144999995827674866 9 1 1 MC_ROLL_CUTOFF 0.000000000000000000 9 1 1 MC_ROLL_P 7.000000000000000000 9 1 1 MC_RR_INT_LIM 0.300000011920928955 9 1 1 MC_THR_CURVE_ACR 0 6 1 1 MC_YAWRATE_D 0.000000000000000000 9 1 1 MC_YAWRATE_FF 0.000000000000000000 9 1 1 MC_YAWRATE_I 0.100000001490116119 9 1 1 MC_YAWRATE_K 1.000000000000000000 9 1 1 MC_YAWRATE_MAX 200.000000000000000000 9 1 1 MC_YAWRATE_P 0.150000005960464478 9 1 1 MC_YAW_CUTOFF 0.000000000000000000 9 1 1 MC_YAW_P 2.000000000000000000 9 1 1 MC_YAW_WEIGHT 0.400000005960464478 9 1 1 MC_YR_INT_LIM 0.300000011920928955 9 1 1 MIS_DIST_1WP 900.000000000000000000 9 1 1 MIS_LND_ABRT_ALT 30 6 1 1 MIS_MNT_YAW_CTL 0 6 1 1 MIS_PD_TO 5.000000000000000000 9 1 1 MIS_TAKEOFF_ALT 2.500000000000000000 9 1 1 MIS_TKO_LAND_REQ 0 6 1 1 MIS_YAW_ERR 12.000000000000000000 9 1 1 MIS_YAW_TMT -1.000000000000000000 9 1 1 MNT_MODE_IN -1 6 1 1 MODALAI_CONFIG 0 6 1 1 MOT_POLE_COUNT 0 6 1 1 MOT_SLEW_MAX 0.000000000000000000 9 1 1 MPC_ACC_DOWN_MAX 3.000000000000000000 9 1 1 MPC_ACC_HOR 5.000000000000000000 9 1 1 MPC_ACC_HOR_MAX 6.000000000000000000 9 1 1 MPC_ACC_UP_MAX 3.000000000000000000 9 1 1 MPC_ALT_MODE 0 6 1 1 MPC_HOLD_DZ 0.100000001490116119 9 1 1 MPC_HOLD_MAX_XY 0.800000011920928955 9 1 1 MPC_HOLD_MAX_Z 0.600000023841857910 9 1 1 MPC_JERK_AUTO 4.000000000000000000 9 1 1 MPC_JERK_MAX 40.000000000000000000 9 1 1 MPC_LAND_ALT1 10.000000000000000000 9 1 1 MPC_LAND_ALT2 5.000000000000000000 9 1 1 MPC_LAND_ALT3 1.000000000000000000 9 1 1 MPC_LAND_CRWL 0.300000011920928955 9 1 1 MPC_LAND_RADIUS 1000.000000000000000000 9 1 1 MPC_LAND_RC_HELP 0 6 1 1 MPC_LAND_SPEED 1.000000000000000000 9 1 1 MPC_MANTHR_MIN 0.079999998211860657 9 1 1 MPC_MAN_TILT_MAX 35.000000000000000000 9 1 1 MPC_MAN_Y_MAX 150.000000000000000000 9 1 1 MPC_MAN_Y_TAU 0.079999998211860657 9 1 1 MPC_POS_MODE 0 6 1 1 MPC_THR_CURVE 0 6 1 1 MPC_THR_HOVER 0.224999994039535522 9 1 1 MPC_THR_MAX 0.750000000000000000 9 1 1 MPC_THR_MIN 0.079999998211860657 9 1 1 MPC_THR_XY_MARG 0.300000011920928955 9 1 1 MPC_TILTMAX_AIR 30.000000000000000000 9 1 1 MPC_TILTMAX_LND 12.000000000000000000 9 1 1 MPC_TKO_RAMP_T 2.000000000000000000 9 1 1 MPC_TKO_SPEED 1.500000000000000000 9 1 1 MPC_USE_HTE 0 6 1 1 MPC_VELD_LP 5.000000000000000000 9 1 1 MPC_VEL_MANUAL 10.000000000000000000 9 1 1 MPC_VEL_MAN_BACK -1.000000000000000000 9 1 1 MPC_VEL_MAN_SIDE -1.000000000000000000 9 1 1 MPC_XY_CRUISE 5.000000000000000000 9 1 1 MPC_XY_ERR_MAX 2.000000000000000000 9 1 1 MPC_XY_MAN_EXPO 0.449999988079071045 9 1 1 MPC_XY_P 0.949999988079071045 9 1 1 MPC_XY_TRAJ_P 0.500000000000000000 9 1 1 MPC_XY_VEL_ALL -10.000000000000000000 9 1 1 MPC_XY_VEL_D_ACC 0.000000000000000000 9 1 1 MPC_XY_VEL_I_ACC 0.100000001490116119 9 1 1 MPC_XY_VEL_MAX 10.000000000000000000 9 1 1 MPC_XY_VEL_P_ACC 3.000000000000000000 9 1 1 MPC_YAWRAUTO_MAX 45.000000000000000000 9 1 1 MPC_YAW_EXPO 0.300000011920928955 9 1 1 MPC_YAW_MODE 0 6 1 1 MPC_Z_MAN_EXPO 0.300000011920928955 9 1 1 MPC_Z_P 3.000000000000000000 9 1 1 MPC_Z_VEL_ALL -3.000000000000000000 9 1 1 MPC_Z_VEL_D_ACC 0.000000000000000000 9 1 1 MPC_Z_VEL_I_ACC 2.000000000000000000 9 1 1 MPC_Z_VEL_MAX_DN 2.000000000000000000 9 1 1 MPC_Z_VEL_MAX_UP 2.000000000000000000 9 1 1 MPC_Z_VEL_P_ACC 12.000000000000000000 9 1 1 MPC_Z_V_AUTO_DN 1.500000000000000000 9 1 1 MPC_Z_V_AUTO_UP 2.000000000000000000 9 1 1 MSP_OSD_CONFIG 0 6 1 1 NAV_ACC_RAD 2.000000000000000000 9 1 1 NAV_DLL_ACT 0 6 1 1 NAV_FORCE_VT 1 6 1 1 NAV_FW_ALTL_RAD 5.000000000000000000 9 1 1 NAV_FW_ALT_RAD 10.000000000000000000 9 1 1 NAV_LOITER_RAD 80.000000000000000000 9 1 1 NAV_MC_ALT_RAD 0.800000011920928955 9 1 1 NAV_MIN_LTR_ALT -1.000000000000000000 9 1 1 NAV_RCL_ACT 2 6 1 1 NAV_TRAFF_AVOID 1 6 1 1 NAV_TRAFF_A_HOR 500.000000000000000000 9 1 1 NAV_TRAFF_A_VER 500.000000000000000000 9 1 1 NAV_TRAFF_COLL_T 60 6 1 1 PLD_BTOUT 5.000000000000000000 9 1 1 PLD_FAPPR_ALT 0.100000001490116119 9 1 1 PLD_HACC_RAD 0.200000002980232239 9 1 1 PLD_MAX_SRCH 3 6 1 1 PLD_SRCH_ALT 10.000000000000000000 9 1 1 PLD_SRCH_TOUT 10.000000000000000000 9 1 1 PWM_MAIN_DIS1 900 6 1 1 PWM_MAIN_DIS2 900 6 1 1 PWM_MAIN_DIS3 900 6 1 1 PWM_MAIN_DIS4 900 6 1 1 PWM_MAIN_DIS5 900 6 1 1 PWM_MAIN_DIS6 900 6 1 1 PWM_MAIN_DIS7 900 6 1 1 PWM_MAIN_DIS8 900 6 1 1 PWM_MAIN_FAIL1 -1 6 1 1 PWM_MAIN_FAIL2 -1 6 1 1 PWM_MAIN_FAIL3 -1 6 1 1 PWM_MAIN_FAIL4 -1 6 1 1 PWM_MAIN_FAIL5 -1 6 1 1 PWM_MAIN_FAIL6 -1 6 1 1 PWM_MAIN_FAIL7 -1 6 1 1 PWM_MAIN_FAIL8 -1 6 1 1 PWM_MAIN_FUNC1 101 6 1 1 PWM_MAIN_FUNC2 102 6 1 1 PWM_MAIN_FUNC3 103 6 1 1 PWM_MAIN_FUNC4 104 6 1 1 PWM_MAIN_FUNC5 0 6 1 1 PWM_MAIN_FUNC6 0 6 1 1 PWM_MAIN_FUNC7 0 6 1 1 PWM_MAIN_FUNC8 0 6 1 1 PWM_MAIN_MAX1 2000 6 1 1 PWM_MAIN_MAX2 2000 6 1 1 PWM_MAIN_MAX3 2000 6 1 1 PWM_MAIN_MAX4 2000 6 1 1 PWM_MAIN_MAX5 2000 6 1 1 PWM_MAIN_MAX6 2000 6 1 1 PWM_MAIN_MAX7 2000 6 1 1 PWM_MAIN_MAX8 2000 6 1 1 PWM_MAIN_MIN1 1000 6 1 1 PWM_MAIN_MIN2 1000 6 1 1 PWM_MAIN_MIN3 1000 6 1 1 PWM_MAIN_MIN4 1000 6 1 1 PWM_MAIN_MIN5 1000 6 1 1 PWM_MAIN_MIN6 1000 6 1 1 PWM_MAIN_MIN7 1000 6 1 1 PWM_MAIN_MIN8 1000 6 1 1 PWM_MAIN_REV 0 6 1 1 PWM_MAIN_TIM0 -2 6 1 1 PWM_MAIN_TIM1 400 6 1 1 PWM_MAIN_TIM2 400 6 1 1 RC10_DZ 0.000000000000000000 9 1 1 RC10_MAX 2000.000000000000000000 9 1 1 RC10_MIN 1000.000000000000000000 9 1 1 RC10_REV 1.000000000000000000 9 1 1 RC10_TRIM 1500.000000000000000000 9 1 1 RC11_DZ 0.000000000000000000 9 1 1 RC11_MAX 2000.000000000000000000 9 1 1 RC11_MIN 1000.000000000000000000 9 1 1 RC11_REV 1.000000000000000000 9 1 1 RC11_TRIM 1500.000000000000000000 9 1 1 RC12_DZ 0.000000000000000000 9 1 1 RC12_MAX 2000.000000000000000000 9 1 1 RC12_MIN 1000.000000000000000000 9 1 1 RC12_REV 1.000000000000000000 9 1 1 RC12_TRIM 1500.000000000000000000 9 1 1 RC13_DZ 0.000000000000000000 9 1 1 RC13_MAX 2000.000000000000000000 9 1 1 RC13_MIN 1000.000000000000000000 9 1 1 RC13_REV 1.000000000000000000 9 1 1 RC13_TRIM 1500.000000000000000000 9 1 1 RC14_DZ 0.000000000000000000 9 1 1 RC14_MAX 2000.000000000000000000 9 1 1 RC14_MIN 1000.000000000000000000 9 1 1 RC14_REV 1.000000000000000000 9 1 1 RC14_TRIM 1500.000000000000000000 9 1 1 RC15_DZ 0.000000000000000000 9 1 1 RC15_MAX 2000.000000000000000000 9 1 1 RC15_MIN 1000.000000000000000000 9 1 1 RC15_REV 1.000000000000000000 9 1 1 RC15_TRIM 1500.000000000000000000 9 1 1 RC16_DZ 0.000000000000000000 9 1 1 RC16_MAX 2000.000000000000000000 9 1 1 RC16_MIN 1000.000000000000000000 9 1 1 RC16_REV 1.000000000000000000 9 1 1 RC16_TRIM 1500.000000000000000000 9 1 1 RC17_DZ 0.000000000000000000 9 1 1 RC17_MAX 2000.000000000000000000 9 1 1 RC17_MIN 1000.000000000000000000 9 1 1 RC17_REV 1.000000000000000000 9 1 1 RC17_TRIM 1500.000000000000000000 9 1 1 RC18_DZ 0.000000000000000000 9 1 1 RC18_MAX 2000.000000000000000000 9 1 1 RC18_MIN 1000.000000000000000000 9 1 1 RC18_REV 1.000000000000000000 9 1 1 RC18_TRIM 1500.000000000000000000 9 1 1 RC1_DZ 10.000000000000000000 9 1 1 RC1_MAX 1897.000000000000000000 9 1 1 RC1_MIN 1103.000000000000000000 9 1 1 RC1_REV -1.000000000000000000 9 1 1 RC1_TRIM 1502.000000000000000000 9 1 1 RC2_DZ 10.000000000000000000 9 1 1 RC2_MAX 1897.000000000000000000 9 1 1 RC2_MIN 1103.000000000000000000 9 1 1 RC2_REV 1.000000000000000000 9 1 1 RC2_TRIM 1501.000000000000000000 9 1 1 RC3_DZ 10.000000000000000000 9 1 1 RC3_MAX 1898.000000000000000000 9 1 1 RC3_MIN 1102.000000000000000000 9 1 1 RC3_REV 1.000000000000000000 9 1 1 RC3_TRIM 1102.000000000000000000 9 1 1 RC4_DZ 10.000000000000000000 9 1 1 RC4_MAX 1897.000000000000000000 9 1 1 RC4_MIN 1103.000000000000000000 9 1 1 RC4_REV -1.000000000000000000 9 1 1 RC4_TRIM 1499.000000000000000000 9 1 1 RC5_DZ 10.000000000000000000 9 1 1 RC5_MAX 1898.000000000000000000 9 1 1 RC5_MIN 1102.000000000000000000 9 1 1 RC5_REV 1.000000000000000000 9 1 1 RC5_TRIM 1500.000000000000000000 9 1 1 RC6_DZ 10.000000000000000000 9 1 1 RC6_MAX 1898.000000000000000000 9 1 1 RC6_MIN 1102.000000000000000000 9 1 1 RC6_REV 1.000000000000000000 9 1 1 RC6_TRIM 1500.000000000000000000 9 1 1 RC7_DZ 10.000000000000000000 9 1 1 RC7_MAX 2000.000000000000000000 9 1 1 RC7_MIN 1000.000000000000000000 9 1 1 RC7_REV 1.000000000000000000 9 1 1 RC7_TRIM 1500.000000000000000000 9 1 1 RC8_DZ 10.000000000000000000 9 1 1 RC8_MAX 2000.000000000000000000 9 1 1 RC8_MIN 1000.000000000000000000 9 1 1 RC8_REV 1.000000000000000000 9 1 1 RC8_TRIM 1500.000000000000000000 9 1 1 RC9_DZ 0.000000000000000000 9 1 1 RC9_MAX 2000.000000000000000000 9 1 1 RC9_MIN 1000.000000000000000000 9 1 1 RC9_REV 1.000000000000000000 9 1 1 RC9_TRIM 1500.000000000000000000 9 1 1 RC_ARMSWITCH_TH 0.750000000000000000 9 1 1 RC_CHAN_CNT 7 6 1 1 RC_ENG_MOT_TH 0.750000000000000000 9 1 1 RC_FAILS_THR 0 6 1 1 RC_GEAR_TH 0.750000000000000000 9 1 1 RC_INPUT_PROTO 3 6 1 1 RC_KILLSWITCH_TH 0.750000000000000000 9 1 1 RC_LOITER_TH 0.750000000000000000 9 1 1 RC_MAP_ACRO_SW 0 6 1 1 RC_MAP_ARM_SW 0 6 1 1 RC_MAP_AUX1 0 6 1 1 RC_MAP_AUX2 0 6 1 1 RC_MAP_AUX3 0 6 1 1 RC_MAP_AUX4 0 6 1 1 RC_MAP_AUX5 0 6 1 1 RC_MAP_AUX6 0 6 1 1 RC_MAP_ENG_MOT 0 6 1 1 RC_MAP_FAILSAFE 0 6 1 1 RC_MAP_FLAPS 0 6 1 1 RC_MAP_FLTMODE 5 6 1 1 RC_MAP_FLTM_BTN 0 6 1 1 RC_MAP_GEAR_SW 0 6 1 1 RC_MAP_KILL_SW 6 6 1 1 RC_MAP_LOITER_SW 0 6 1 1 RC_MAP_MAN_SW 0 6 1 1 RC_MAP_MODE_SW 0 6 1 1 RC_MAP_OFFB_SW 0 6 1 1 RC_MAP_PARAM1 0 6 1 1 RC_MAP_PARAM2 0 6 1 1 RC_MAP_PARAM3 0 6 1 1 RC_MAP_PITCH 2 6 1 1 RC_MAP_POSCTL_SW 0 6 1 1 RC_MAP_RATT_SW 0 6 1 1 RC_MAP_RETURN_SW 0 6 1 1 RC_MAP_ROLL 1 6 1 1 RC_MAP_STAB_SW 0 6 1 1 RC_MAP_THROTTLE 3 6 1 1 RC_MAP_TRANS_SW 0 6 1 1 RC_MAP_YAW 4 6 1 1 RC_OFFB_TH 0.750000000000000000 9 1 1 RC_PORT_CONFIG 0 6 1 1 RC_RETURN_TH 0.750000000000000000 9 1 1 RC_RSSI_PWM_CHAN 0 6 1 1 RC_RSSI_PWM_MAX 2000 6 1 1 RC_RSSI_PWM_MIN 1000 6 1 1 RC_TRANS_TH 0.750000000000000000 9 1 1 RTL_CONE_ANG 45 6 1 1 RTL_DESCEND_ALT 15.000000000000000000 9 1 1 RTL_HDG_MD 0 6 1 1 RTL_LAND_DELAY 1.000000000000000000 9 1 1 RTL_LOITER_RAD 80.000000000000000000 9 1 1 RTL_MIN_DIST 10.000000000000000000 9 1 1 RTL_PLD_MD 0 6 1 1 RTL_RETURN_ALT 15.000000000000000000 9 1 1 RTL_TIME_FACTOR 1.100000023841857910 9 1 1 RTL_TIME_MARGIN 100 6 1 1 RTL_TYPE 0 6 1 1 SDLOG_BOOT_BAT 0 6 1 1 SDLOG_DIRS_MAX 0 6 1 1 SDLOG_MISSION 0 6 1 1 SDLOG_MODE 0 6 1 1 SDLOG_PROFILE 1 6 1 1 SDLOG_UTC_OFFSET 0 6 1 1 SDLOG_UUID 1 6 1 1 SENS_BARO_QNH 1013.250000000000000000 9 1 1 SENS_BARO_RATE 20.000000000000000000 9 1 1 SENS_BOARD_ROT 0 6 1 1 SENS_BOARD_X_OFF 0.082520216703414917 9 1 1 SENS_BOARD_Y_OFF 0.260665357112884521 9 1 1 SENS_BOARD_Z_OFF 0.000000000000000000 9 1 1 SENS_CM8JL65_CFG 0 6 1 1 SENS_DPRES_OFF 0.000000000000000000 9 1 1 SENS_EN_BATT 0 6 1 1 SENS_EN_IRLOCK 0 6 1 1 SENS_EN_LL40LS 0 6 1 1 SENS_EN_MB12XX 0 6 1 1 SENS_EN_MPDT 0 6 1 1 SENS_EN_MS4525DO 0 6 1 1 SENS_EN_MS5525DS 0 6 1 1 SENS_EN_PAA3905 0 6 1 1 SENS_EN_PAW3902 0 6 1 1 SENS_EN_PGA460 0 6 1 1 SENS_EN_PMW3901 0 6 1 1 SENS_EN_PX4FLOW 0 6 1 1 SENS_EN_SDP3X 0 6 1 1 SENS_EN_SF1XX 0 6 1 1 SENS_EN_TF02PRO 0 6 1 1 SENS_EN_THERMAL -1 6 1 1 SENS_EN_TRANGER 0 6 1 1 SENS_EN_VL53L0X 0 6 1 1 SENS_EN_VL53L1X 0 6 1 1 SENS_EXT_I2C_PRB 1 6 1 1 SENS_IMU_AUTOCAL 0 6 1 1 SENS_IMU_MODE 0 6 1 1 SENS_LEDDAR1_CFG 0 6 1 1 SENS_MAG_MODE 0 6 1 1 SENS_SF0X_CFG 0 6 1 1 SENS_TFLOW_CFG 0 6 1 1 SENS_TFMINI_CFG 0 6 1 1 SENS_ULAND_CFG 0 6 1 1 SER_GPS1_BAUD 0 6 1 1 SER_TEL1_BAUD 921600 6 1 1 SYS_AUTOCONFIG 0 6 1 1 SYS_AUTOSTART 4001 6 1 1 SYS_CAL_ACCEL 0 6 1 1 SYS_CAL_BARO 0 6 1 1 SYS_CAL_GYRO 0 6 1 1 SYS_CAL_TDEL 24 6 1 1 SYS_CAL_TMAX 10 6 1 1 SYS_CAL_TMIN 5 6 1 1 SYS_DM_BACKEND 0 6 1 1 SYS_FAC_CAL_MODE 0 6 1 1 SYS_FAILURE_EN 0 6 1 1 SYS_HAS_BARO 1 6 1 1 SYS_HAS_GPS 0 6 1 1 SYS_HAS_MAG 0 6 1 1 SYS_HAS_NUM_DIST 0 6 1 1 SYS_HITL 0 6 1 1 SYS_MC_EST_GROUP 2 6 1 1 SYS_RGB_MAXBRT 1.000000000000000000 9 1 1 SYS_STCK_EN 1 6 1 1 SYS_VEHICLE_RESP -0.400000005960464478 9 1 1 TC_A_ENABLE 0 6 1 1 TC_B_ENABLE 0 6 1 1 TC_G_ENABLE 0 6 1 1 TEL_BST_EN 0 6 1 1 TEL_FRSKY_CONFIG 0 6 1 1 TEL_HOTT_CONFIG 0 6 1 1 THR_MDL_FAC 0.730000019073486328 9 1 1 TRIG_MODE 0 6 1 1 VOXL_ESC_BAUD 250000 6 1 1 VOXL_ESC_CONFIG 1 6 1 1 VOXL_ESC_FUNC1 0 6 1 1 VOXL_ESC_FUNC2 0 6 1 1 VOXL_ESC_FUNC3 0 6 1 1 VOXL_ESC_FUNC4 0 6 1 1 VOXL_ESC_MODE 0 6 1 1 VOXL_ESC_PUB_BST 1 6 1 1 VOXL_ESC_REV 0 6 1 1 VOXL_ESC_RPM_MAX 15000 6 1 1 VOXL_ESC_RPM_MIN 5500 6 1 1 VOXL_ESC_SDIR1 0 6 1 1 VOXL_ESC_SDIR2 0 6 1 1 VOXL_ESC_SDIR3 0 6 1 1 VOXL_ESC_SDIR4 0 6 1 1 VOXL_ESC_T_COSP 0.990000009536743164 9 1 1 VOXL_ESC_T_DEAD 20 6 1 1 VOXL_ESC_T_EXPO 35 6 1 1 VOXL_ESC_T_MINF 0.150000005960464478 9 1 1 VOXL_ESC_T_PERC 90 6 1 1 VOXL_ESC_VLOG 0 6 1 1 VTO_LOITER_ALT 80.000000000000000000 9 1 1 VT_B_DEC_MSS 2.000000000000000000 9 1 1 WV_EN 0 6 1 1 WV_GAIN 1.000000000000000000 9 1 1 WV_ROLL_MIN 1.000000000000000000 9 1 1 WV_YRATE_MAX 90.000000000000000000 9 1 1 XRCE_DDS_CFG 0 6@skl1g14 , based on the following function, the shunt parameters are not required and will default to nominal values if not present : https://github.com/PX4/PX4-Autopilot/blob/main/src/drivers/power_monitor/voxlpm/voxlpm.cpp#L163
So i am not sure what happened, it is possible that adding those shunt values to px4 params and issue being resolved was a coincidence - perhaps something else has triggered the change..
-
@skl1g14 , based on the following function, the shunt parameters are not required and will default to nominal values if not present : https://github.com/PX4/PX4-Autopilot/blob/main/src/drivers/power_monitor/voxlpm/voxlpm.cpp#L163
So i am not sure what happened, it is possible that adding those shunt values to px4 params and issue being resolved was a coincidence - perhaps something else has triggered the change..
Yes, i believe that might be the case. There might be some other px4 firmware parameters that are causing it.
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login