Hello @Alex-Kushleyev and @Moderator ,
Thank you for the response!!!
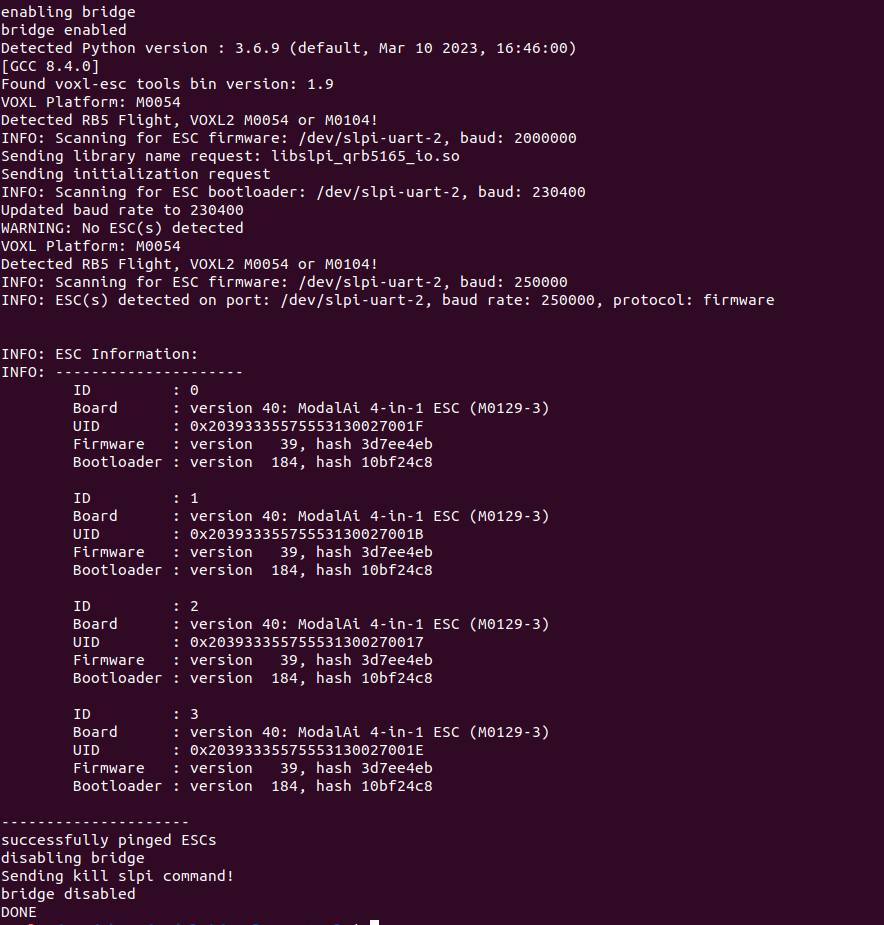
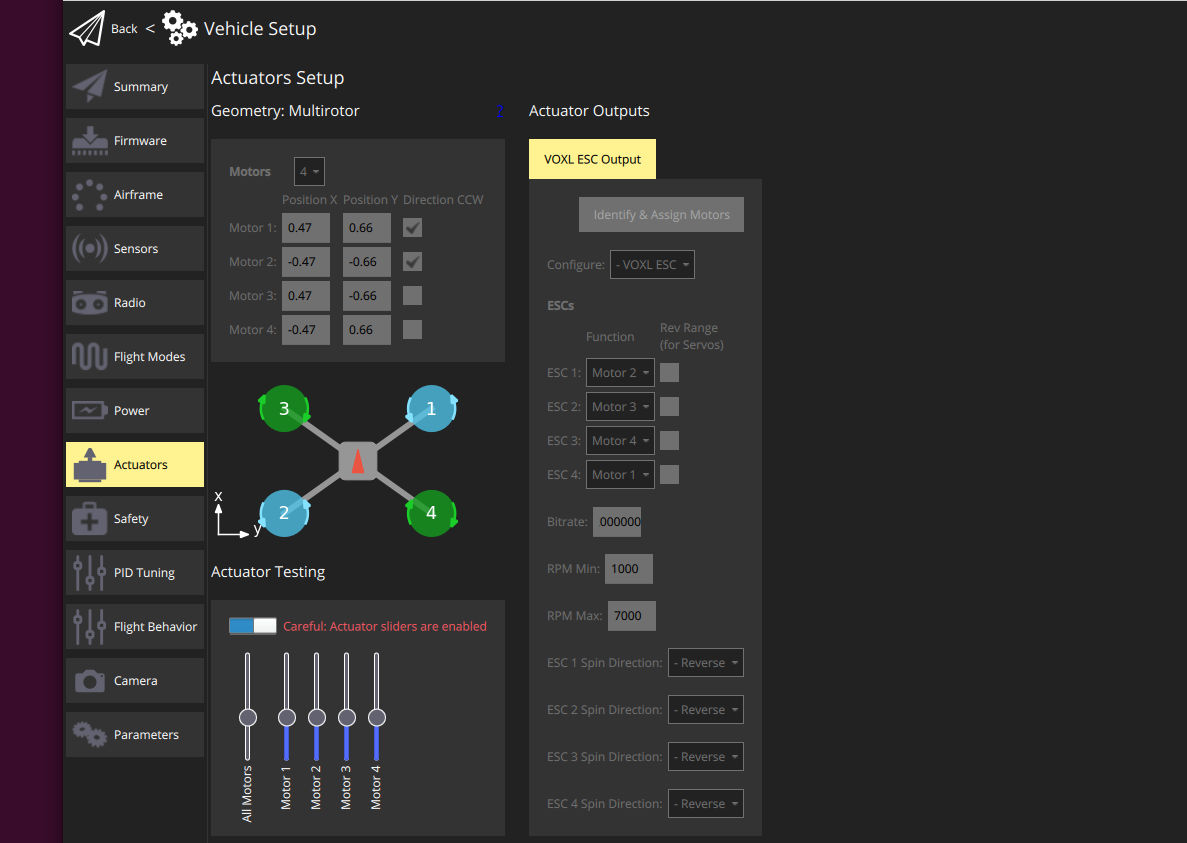
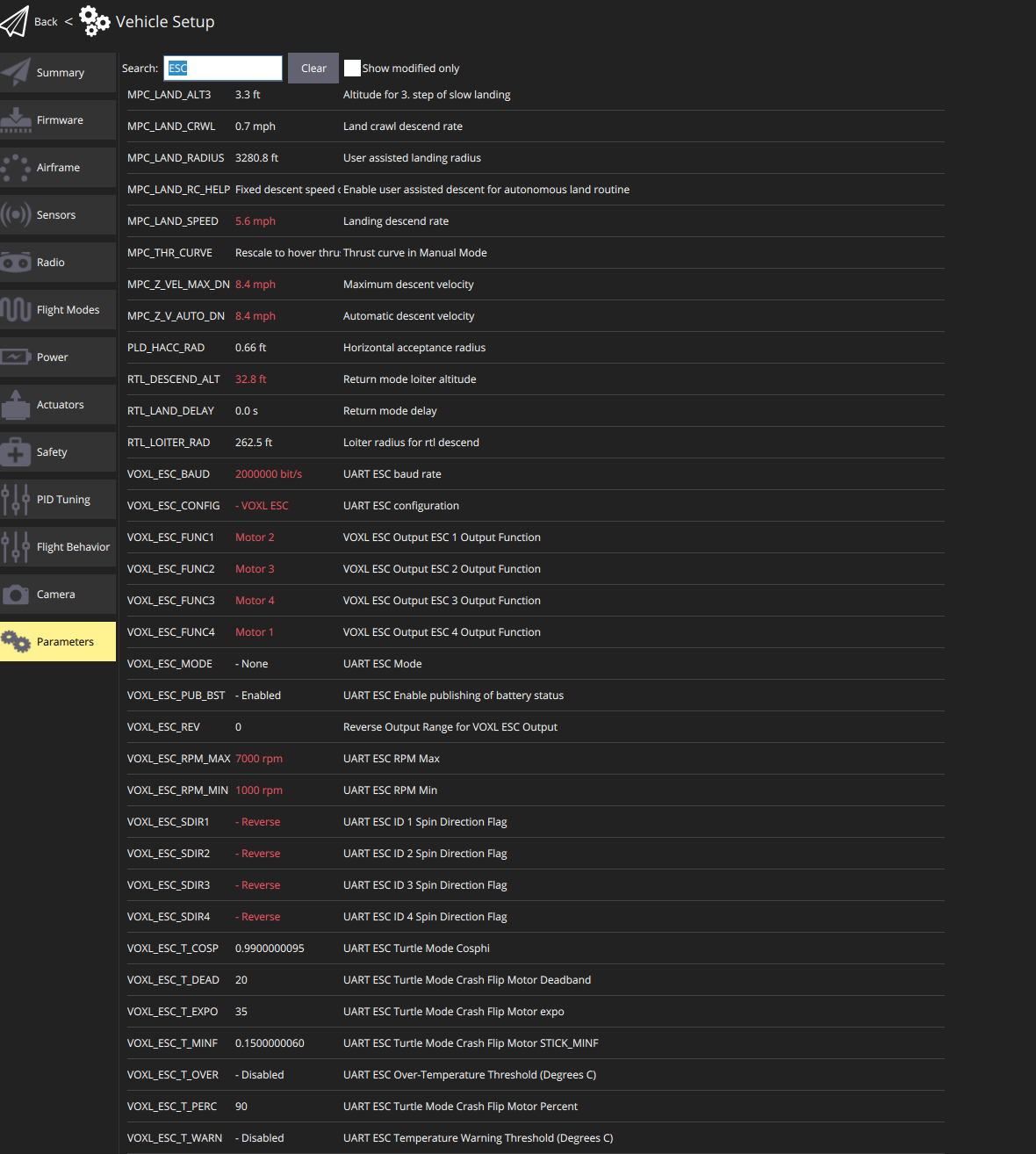
As Alex pointed out, the baud rate seems to be the issue preventing the motors from spinning through the Actuator Testing feature in QGC. I have another ESC configured with a 2M baud rate, and it works as expected with Actuator Testing.
My question now is: how can I update the baud rate on the ESC?
In QGC, the baud rate is already set to 2M.
In https://gitlab.com/voxl-public/voxl-sdk/utilities/voxl-esc/-/tree/master/voxl-esc-tools,
I came across the command:
./voxl-esc-upload-params.py --params-file ../params/esc_params_modalai_4_in_1.xml
However, I wasn’t able to locate this XML file on the VOXL.
Here's what I found in the VOXL:
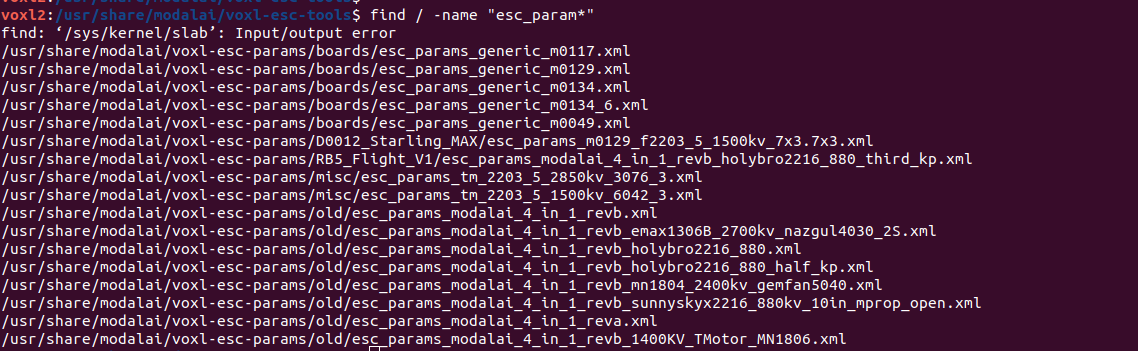
In the repo I found is esc_params_modalai_4_in_1_revb_mn1804_2400kv_gemfan5040.xml
Should I upload this xml to /usr/share/modalai/voxl-esc-params/boards/, rename it to esc_params_modalai_4_in_1.xml, and use the python command above?
I also tried to manually change the baud rate to 2M in those XML files but it gets overwritten after a reboot.
Could you please provide more detailed instructions on how to properly update the ESC baud rate?
Thank you.