Hi @Matthew-Howlett ,
No the m500 currently has a BMP388.
Hi @Matthew-Howlett ,
No the m500 currently has a BMP388.
The official product documentation is located at https://docs.modalai.com/
The purpose of this forum is to supplement that documentation, and to update the official docs when we find information missing.
Hi @rapit ,
OK we validated that a USB3 device can show up, here's a "guide", but there's no new info really, just an example: https://docs.modalai.com/voxl-as-usb-host/
-Travis
Hi @mrawding ,
The current early release on the EVT hardware relies on gstreamer.... for example:
cd /data/misc/camera
rm *
gst-launch-1.0 -e qtiqmmfsrc camera=0 name=tracker ! video/x-h264,format=NV12,width=640,height=480,framerate=30/1 ! queue ! h264parse ! avdec_h264 ! videoconvert ! pngenc ! multifilesink enable-last-sample=false location="/data/misc/camera/cam0_img_%d_.png"
This will save images to the path specified. We're actively working on getting the same interfacing as VOXL up on this ;). Next few weeks should have some good PUBLIC REPO updates.
Hi @gauravshukla914,
If voxl-vision-px4 is setup for VOA it will connect to the stereo and 'take over', if that's the case can you try the following before launching?
systemctl stop voxl-vision-px4
FYI for the future, the MPA architecture (https://gitlab.com/voxl-public/modal-pipe-architecture) will provide 'fan out' and allow multiple clients for a given camera.
@Gaurav-Borade , we have one in the works that should be ready shortly, I'll send a link once we get it posted!
Hi @mrawding ,
You are correct, there's something wrong, and I'm investigating this now.
The UART is active after bootup but then something fishy is happening.
When used with PX4 (ran on bootup) there's no issue.
I'll post here when there's an update to fix.
Hi @gauravshukla914 ,
Our flight controller is a little unique in that it can't be powered off USB so yes, it will lose power and connection during the standard process. (The reason being our Flight Controller shares the 5V rail with the companion computer and 500mA off USB won't suffice!)
To get around this, we have a tool that has a user guide here:
https://docs.modalai.com/flight-core-pwm-esc-calibration/
This allows you to keep the battery connected during the ESC calibration process.
This is for the STM32 based FlightCore.... not SLPI ") which I think you're super aware of but making sure!
which I think you're super aware of but making sure!
Hi @Kevin ,
The VOXL2 (M0054) and RB5 Flight (M0052) images aren't compatible as they have different kernel and rootfs. So flashing the VOXL2 onto the RB5 leads to bricking.
But, on the RB5, you can get to a 'factory state' following this:
https://docs.modalai.com/Qualcomm-Flight-RB5-QDL/
That image is a factory image that is pretty old and not fully useable, so we need to flash an update.
You then have two choices.... reflash the same (9.1 based) image and use the RB5 Flight software (now in maintenance mode).
Or, use the ModalAI maintained VOXL SDK. To use the VOXL SDK, you need to update your RB5 Flight hardware with this from downloads.modalai.com :
We are currently working on an improved update guide and will post shortly.
Hi @gauravshukla914 ,
Thanks for the help with this. We've released a new beta version of the voxl-hal3-tof-cam-ros that supports auto detection of ToF and defaults the persist.camera.modalai.tof setting properly.
It will be in out next voxl-suite release, but is available from our dev channel here if you are interested in using this link
The updated readme is here.
Thanks!
This one is a little different in that they don't need a EULA so we throw 'em in the public docs:

ModalAI technical documentation for VOXL and VOXL 2 Companion Computers for PX4 and ArduPilot Obstacle Avoidance and GPS-denied navigation, assembled in the USA
ModalAI Technical Docs (docs.modalai.com)
Little more detail, we've validated with FrSky X8R reciever and Taranis X7 transmitter with the following setup:
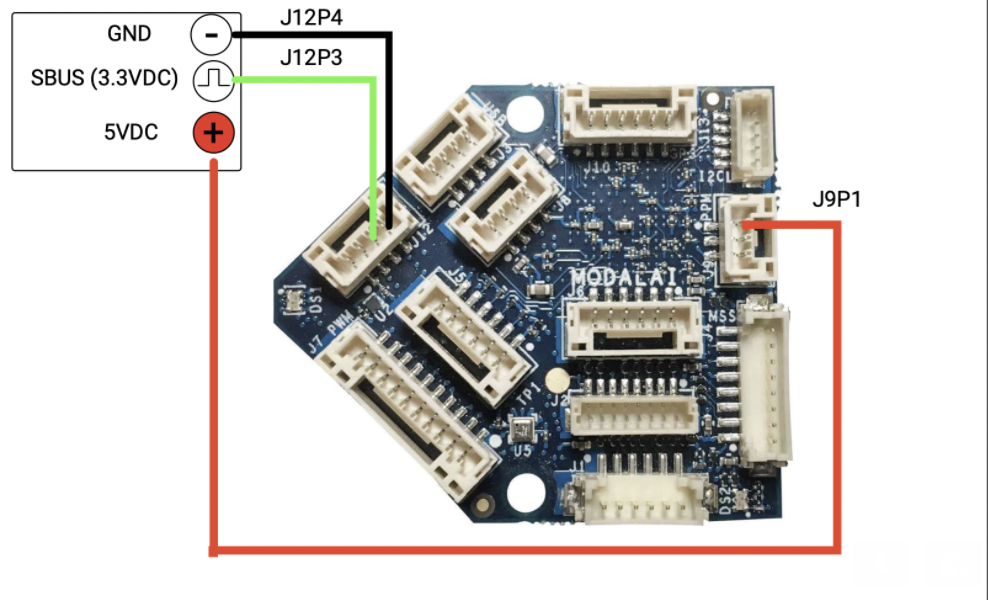
We have a new cable about to come out to assist with this wiring as well:
https://docs.modalai.com/cable-datasheets/#mcbl-00018
Hi @roy ,
Typically the easiest way to interface is through a UART. That's what we do on our VOXL-Flight product. There's the Snapdragon 821 on one side, and an STM32 on the other, and they communicate via a UART at 921.6kbuad. Latency has not been an issue.
Same idea roughly on VOXL2, except this time we have PX4 running ON the snapdragon 865 on a DSP instead of offboard.
BUT, you don't need to use that, and can get mavlink going over UART to some other controller that has a UART and speaks mavlink.
We are in the process of exposing more UART(s) that the application processor can have access to.
Right now you need a daughter board that has a 2W uart exposed on a JST 4 pin.
Soon, we're looking to change the SPI on J8 to a UART, and with a little level shifter, we can get UART in that way.
We are also working on getting the UARTs that are on J19 to be "pass through" through the DSP. Once we have that going, then you could connect via J19 without level translators. So a few opions... the only one immediately available is via a daughter board UART, or if you wanted to try a SPI to UART convertor off of J10....
Holler if you have any more questions and we can help.
Hi @gauravshukla914 let us take a look at this and get some info for you. Nice pictures, I always love seeing these
Hey all on thread, some updates here.
Main issue - USB-C as host not working yet on VOXL2:
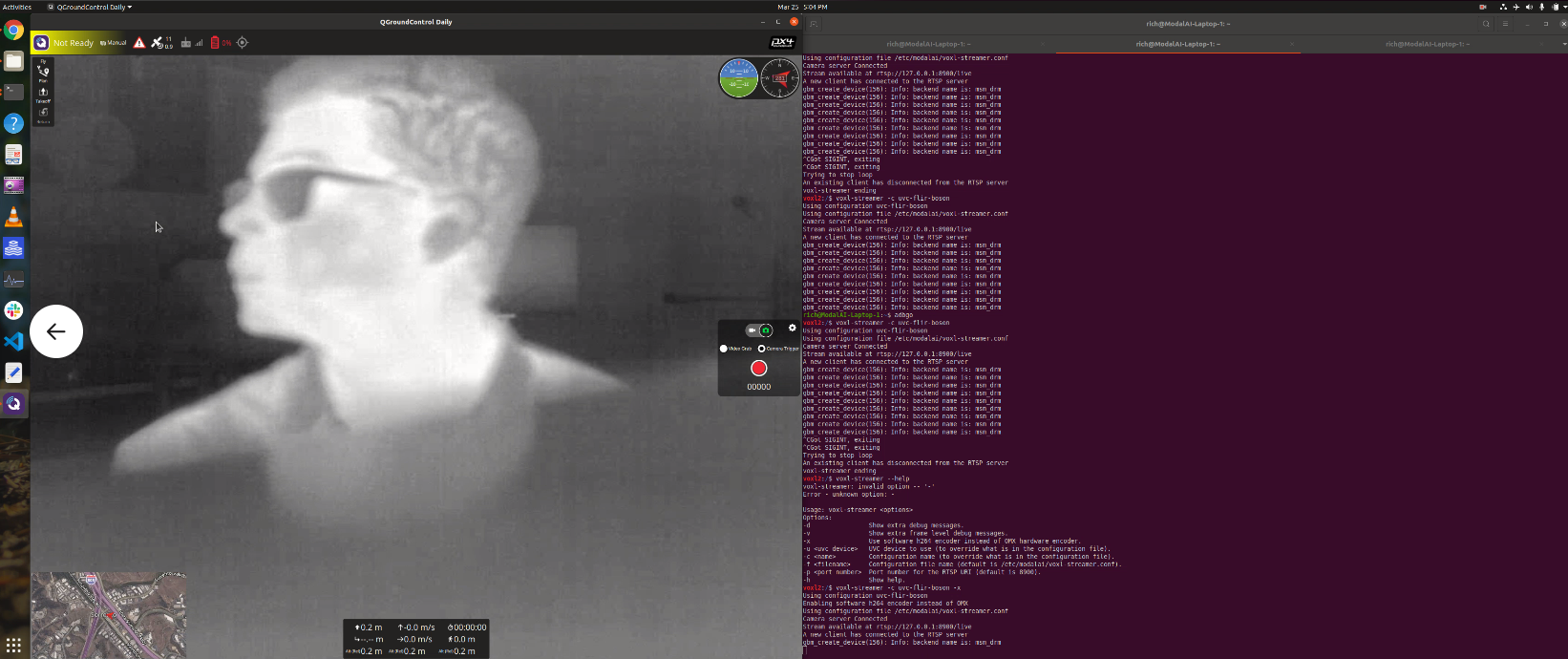
Recommended configuration for Boson connection:
If you also need two USB ports, then this board (the M0090 carrier board only) which has:
if just 1 USB port, then we have a smaller M0078 USB debug board
if just 1 USB port AND you want to add an applications processor UART port on 4pin JST, we will have a new M0125 up online shortly, which I think is pretty cool!
Using out of the USBC connector will prevent you from adb access.... so in a vehicle if it's permanently mounted there (and assuming I get the fix!) then you could prevent ability to flash it later on if needed or to troubleshoot, but if that's no issue then I'll update you ASAP when I have updates on this.
Which Boson?
Hi @gauravshukla914 ,
This looks to be supported in a new feature that is in our 'beta' system image release version 3.2.0 (available at developer.modalai.com for download).
It requires an unreleased version of voxl-hal3-tof-cam-ros, see here
https://gitlab.com/voxl-public/ros/voxl-hal3-tof-cam-ros/-/blob/release/v0.0.5/source/launch/tof.launch#L31
We haven't merged this into a release yet, so we don't have a packaged release for this, but you could build from source if needed until then if you're up to try it out.
Hi @liftedsystems , info posted here: https://docs.modalai.com/flight-core-v2/
@gauravshukla914 yes we'll get an email going, I'll use the email that's tied to your account here.
@Jetson-Nano not at this time and not with QVIO. We are working on multi cam VIO but can't provide any details or release dates really at this time.