Thanks @modaltb, your explanation was very helpful.
Regarding latency, is there any response delay from converting a sensor output to mavlink protocol then interpreting that mavlink message into a behavior? Versus directly interpreting the sensor output on the VOXL 2. Or, is the the communication across the board always mavlink? (Thus the latency/response delay would be about equal)
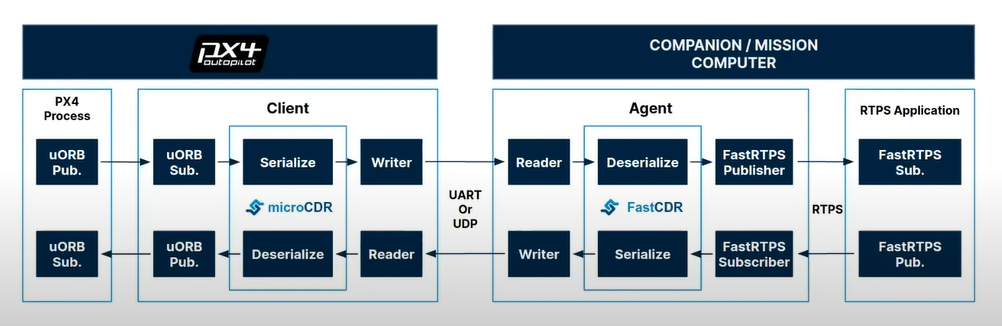
Will there able future development to include a PX4-RTPS bridge via uORB? The attached image contains a diagram of the bridge.