@Adrian-Hidalgo Correct, this is on an m500 drone. I intend to fly to GPS waypoints in mission mode (I have done this a few times successfully before noticing the local_position_ned was drifting). I didn't see the vehicle drift while in flight but wanted to double-check before flying again. I am not sure when the local_position_ned began drifting. I have tried resetting qvio - seeing that doing so had resolved local_position_ned issues for someone on another forum. I have the drone on my desk and powered from a 12V 3A wall power supply - I believe that is why the battery status reports zero (when I use a lipo, the battery status looks correct). & yes the vehicle parameters have been loaded.
M
Latest posts made by Matthew Howlett
-
RE: QGC LOCAL_POSITION_NED driftingposted in Ask your questions right here!
-
RE: QGC LOCAL_POSITION_NED driftingposted in Ask your questions right here!
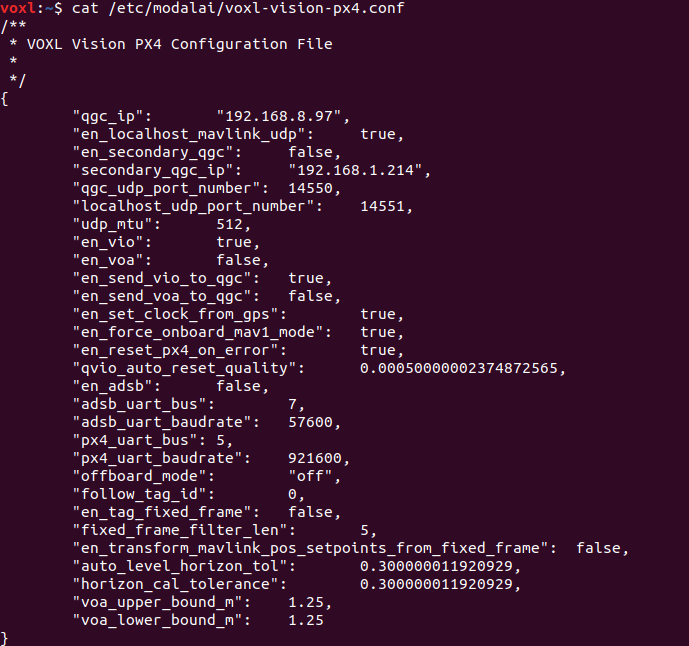
updated voxl-vision-px4.conf:
Here is a link to a video showing the local_position_ned in QGC. (x,y) starts at (0,0), begins updating around 30 seconds into the video, and then drifts the rest of the video:
https://drive.google.com/file/d/1OSAgLHbxG5hQQcpUYgtwHRjWdo-vgqHW/view?usp=sharingI understand the GPS position may drift, especially if indoors (I was indoors for the above screen recording). But looking at the PX4-autopilot mavlink code, the local_position_ned should not rely on the GPS. It is calculated from the fused computer vision and accelerometers, correct?
-
RE: QGC LOCAL_POSITION_NED driftingposted in Ask your questions right here!
@Adrian-Hidalgo Thanks for the quick reply!
So, that explains why x and y start at 0. My ekf2_aid_mask is set to 1. I don't intend to fly with computer vision enabled.
However, x and y do sometimes start updating and begin drifting. Any idea why that is? Can I just ignore that? -
QGC LOCAL_POSITION_NED driftingposted in Ask your questions right here!
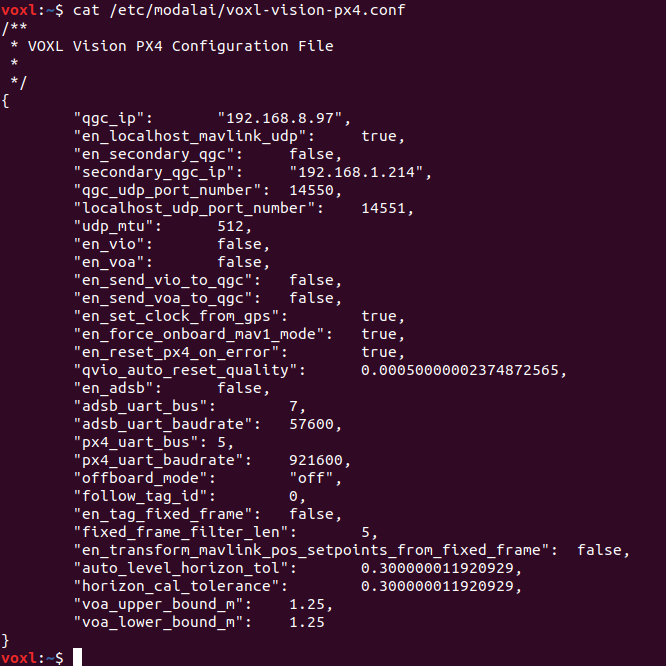
Hello, I am noticing two curious things about the reported local_position_ned in qgroundcontrol's mavlink inspector when the drone has just been powered and is stationary.
- The x and y values sometimes start out as 0, 0 and don't update.
- When the x and y values do update, they will begin drifting a considerable amount. I have seen drifts of +/- 3 meters.
Video showing above behavior: https://drive.google.com/file/d/15egtrzoSuTfRdfDQPN6VVn76V3ON6shY/view?usp=sharing
Does anyone have an explanation for the drift? Is this normal? Will it affect flight performance? I do notice the reported attitude of the drone is stable.
Additional info:
voxl-vision-px4 config
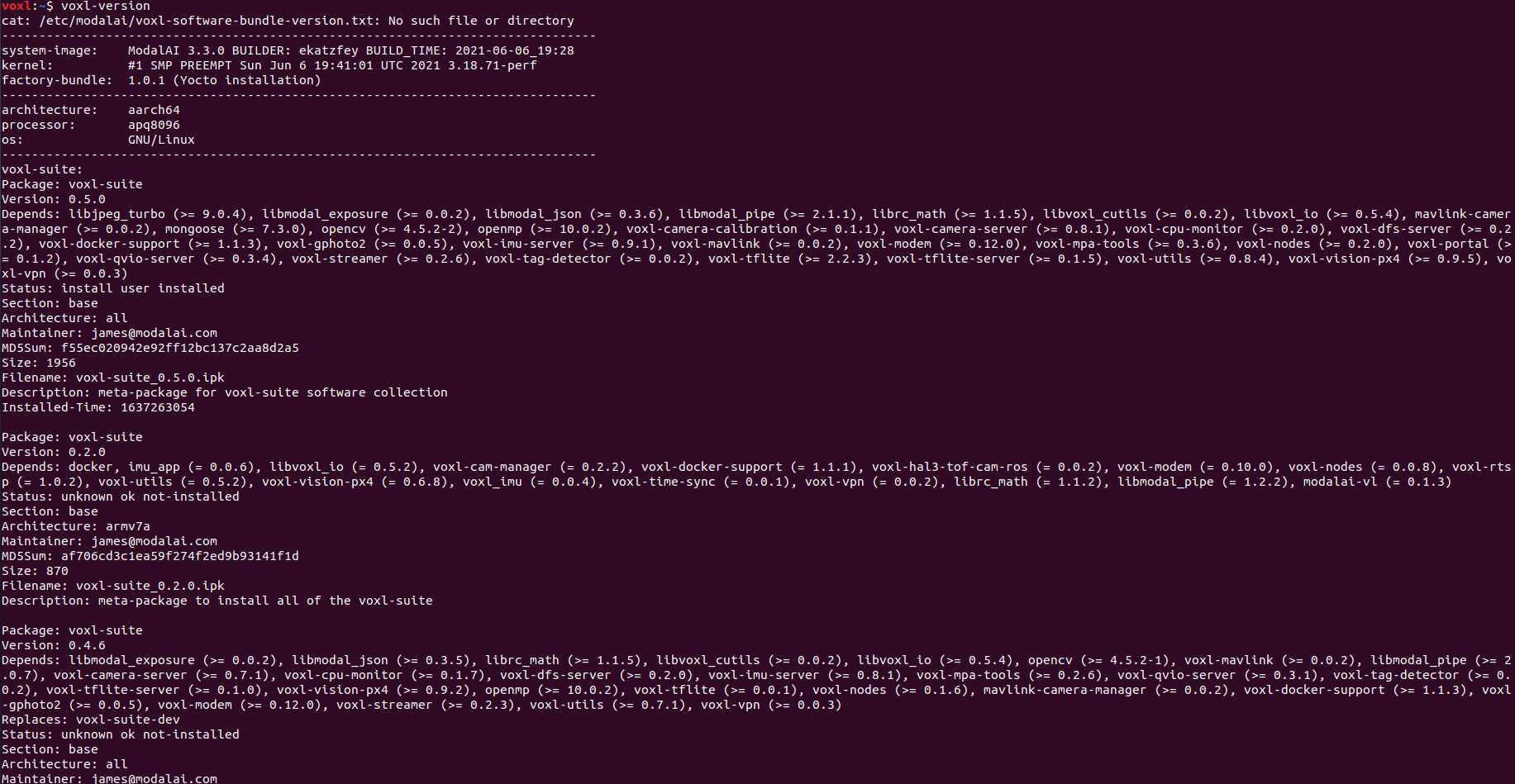
voxl-verison
-
How to use voxl-logger to sample hires camera?posted in VOXL m500 Reference Drone
Hello,
I am able use the voxl-logger for both the stereo and tracking camera, but for some unknown reason I cannot sample the hires camera. What am I missing here?I can provide more information if needed.
Thanks
-
RE: voxl-gpio not working as expectedposted in VOXL m500 Reference Drone
Great, thanks for the info. I suspected something along those lines.
-
voxl-gpio not working as expectedposted in VOXL m500 Reference Drone
I have tried all the listed GPIO pins exposed on connectors J7, J10, J11 and J12.
Why can't I write to a GPIO pin?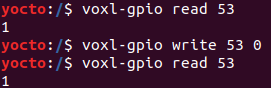
-
RE: Which sensors are includes in RB5 platformsposted in Qualcomm Flight RB5 5G Drone
Is the ICP-10100 Barometer on the m500 development drone as well?
-
RE: ADB Device Offlineposted in Ask your questions right here!
Update: I didn't realize how fast this operation needed to be done until reading this: "power on VOXL and then QUICKLY turn switch off and then hit ENTER to run the ./install.sh script" from this thread. After trying that a couple of times, it flashed, and appears to be functioning correctly now!

-
RE: ADB Device Offlineposted in Ask your questions right here!
@Chad-Sweet I power on the device with fastboot switched on, then I switch fastboot off and leave it off.
... Although, if I leave fastboot enabled I don't notice the device restart after 10 seconds (LED stays lit and the fan continues spinning). Is that expected?