@Adrian-Hidalgo Correct, this is on an m500 drone. I intend to fly to GPS waypoints in mission mode (I have done this a few times successfully before noticing the local_position_ned was drifting). I didn't see the vehicle drift while in flight but wanted to double-check before flying again. I am not sure when the local_position_ned began drifting. I have tried resetting qvio - seeing that doing so had resolved local_position_ned issues for someone on another forum. I have the drone on my desk and powered from a 12V 3A wall power supply - I believe that is why the battery status reports zero (when I use a lipo, the battery status looks correct). & yes the vehicle parameters have been loaded.
M
Matthew Howlett
@Matthew Howlett
Posts
-
QGC LOCAL_POSITION_NED drifting -
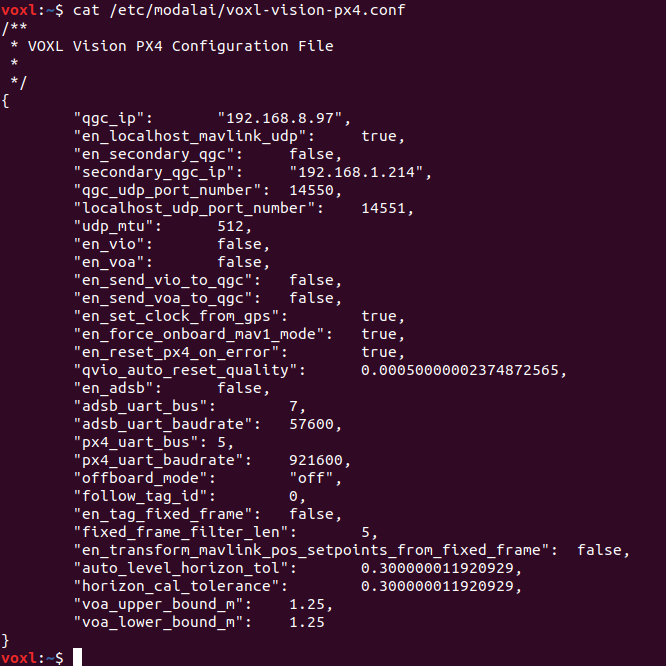
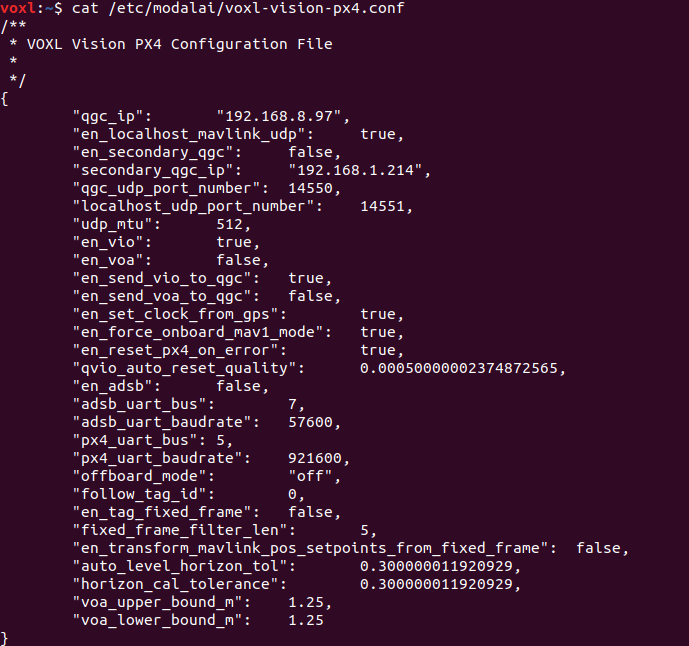
QGC LOCAL_POSITION_NED driftingupdated voxl-vision-px4.conf:
Here is a link to a video showing the local_position_ned in QGC. (x,y) starts at (0,0), begins updating around 30 seconds into the video, and then drifts the rest of the video:
https://drive.google.com/file/d/1OSAgLHbxG5hQQcpUYgtwHRjWdo-vgqHW/view?usp=sharingI understand the GPS position may drift, especially if indoors (I was indoors for the above screen recording). But looking at the PX4-autopilot mavlink code, the local_position_ned should not rely on the GPS. It is calculated from the fused computer vision and accelerometers, correct?
-
QGC LOCAL_POSITION_NED drifting@Adrian-Hidalgo Thanks for the quick reply!
So, that explains why x and y start at 0. My ekf2_aid_mask is set to 1. I don't intend to fly with computer vision enabled.
However, x and y do sometimes start updating and begin drifting. Any idea why that is? Can I just ignore that? -
QGC LOCAL_POSITION_NED driftingHello, I am noticing two curious things about the reported local_position_ned in qgroundcontrol's mavlink inspector when the drone has just been powered and is stationary.
- The x and y values sometimes start out as 0, 0 and don't update.
- When the x and y values do update, they will begin drifting a considerable amount. I have seen drifts of +/- 3 meters.
Video showing above behavior: https://drive.google.com/file/d/15egtrzoSuTfRdfDQPN6VVn76V3ON6shY/view?usp=sharing
Does anyone have an explanation for the drift? Is this normal? Will it affect flight performance? I do notice the reported attitude of the drone is stable.
Additional info:
voxl-vision-px4 config
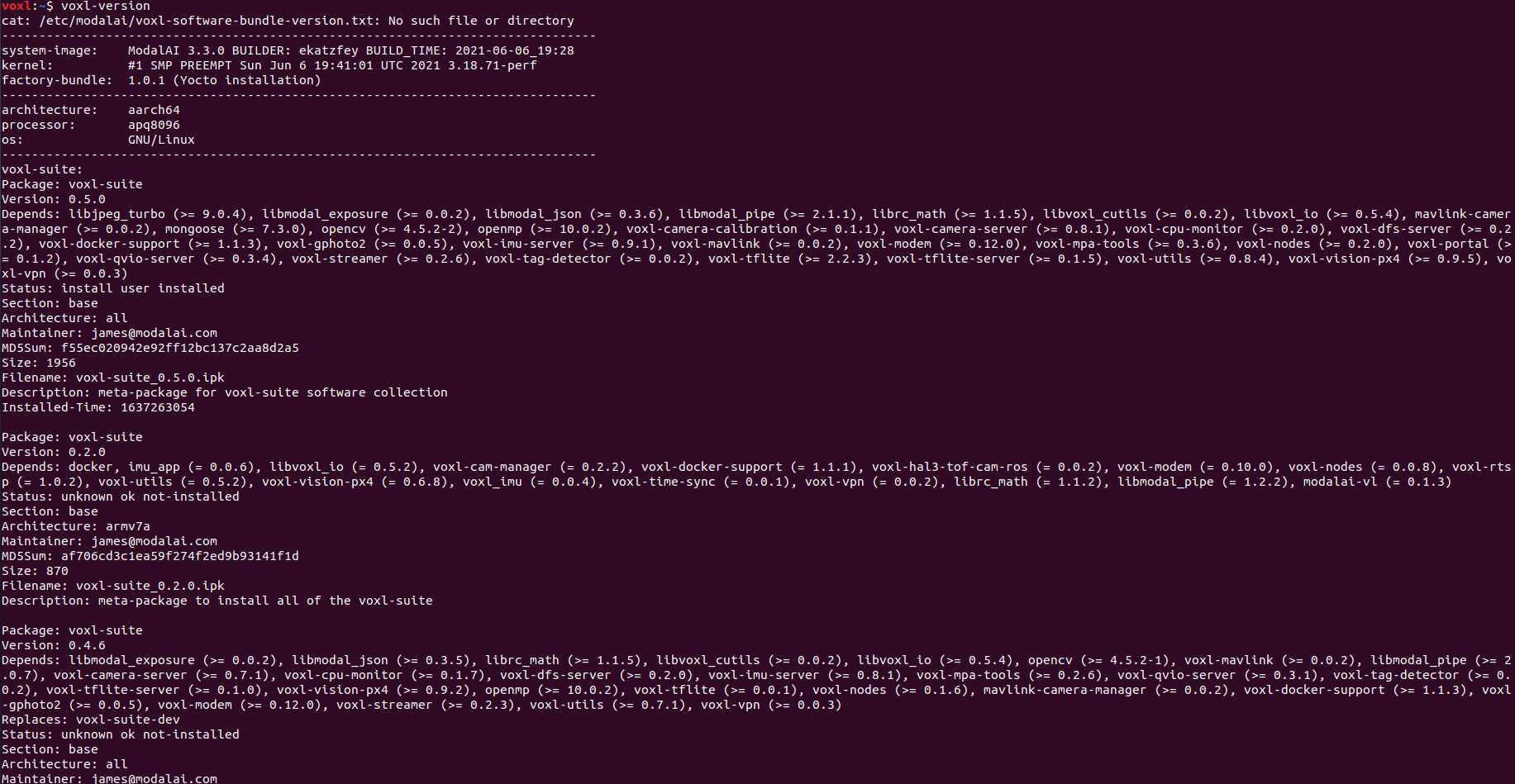
voxl-verison
-
How to use voxl-logger to sample hires camera?Hello,
I am able use the voxl-logger for both the stereo and tracking camera, but for some unknown reason I cannot sample the hires camera. What am I missing here?I can provide more information if needed.
Thanks
-
voxl-gpio not working as expectedGreat, thanks for the info. I suspected something along those lines.
-
voxl-gpio not working as expectedI have tried all the listed GPIO pins exposed on connectors J7, J10, J11 and J12.
Why can't I write to a GPIO pin?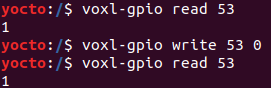
-
Which sensors are includes in RB5 platformsIs the ICP-10100 Barometer on the m500 development drone as well?
-
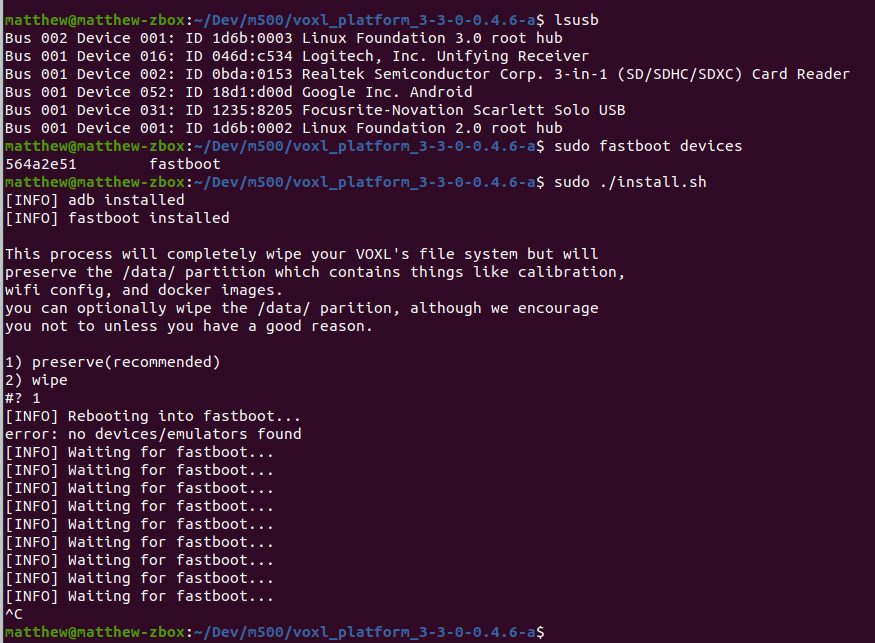
ADB Device OfflineUpdate: I didn't realize how fast this operation needed to be done until reading this: "power on VOXL and then QUICKLY turn switch off and then hit ENTER to run the ./install.sh script" from this thread. After trying that a couple of times, it flashed, and appears to be functioning correctly now!

-
ADB Device Offline@Chad-Sweet I power on the device with fastboot switched on, then I switch fastboot off and leave it off.
... Although, if I leave fastboot enabled I don't notice the device restart after 10 seconds (LED stays lit and the fan continues spinning). Is that expected?
-
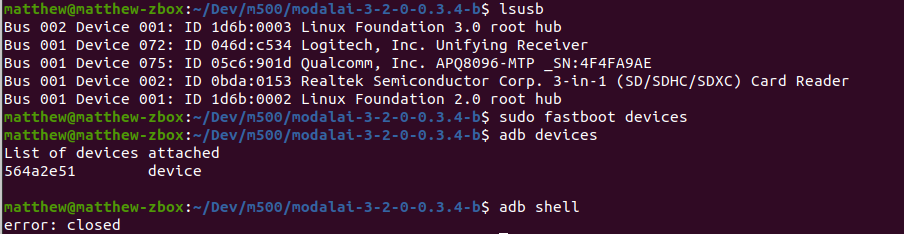
ADB Device OfflineHello,
I am experiencing the same problem. Although, I do have the debug add-on board. I have been able to detect an adb and fastboot device a handful of times, but whenever I try a follow-up command I get an error and the device goes offline. Any suggestions?Note: I have tried powering the m500 from both a lipo & the standard 12V/3A wall outlet as suggested on this forum. I also have tried toggling the fastboot switch and running the install.sh program within 10 seconds of booting, but the device continues to go offline.
No luck with restarting the adb server and reconnecting the device either.