Thanks, @modaltb! yes, that seems to be the cause; we received two sentinel drones yesterday and for the same reason they have not had GPS signal available either. But that's ok, we don't need GPS for indoor flight tests.
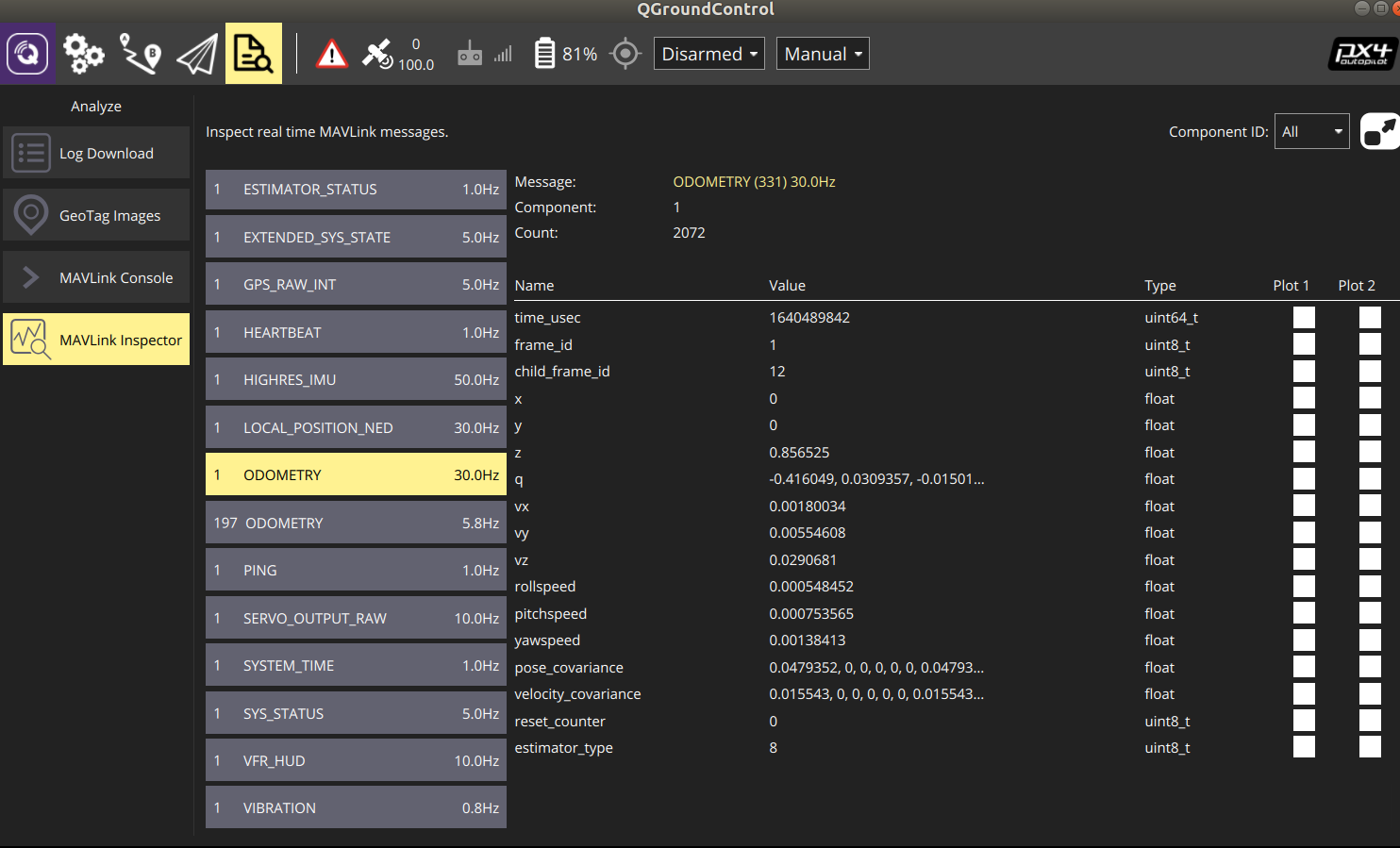
could you please comment on the odometery problem which I mentioned in the first post? I have two odemetry components with id=1 and id=197 in MAVLink Inspector in QGC. The odometry component with id=1 works fine and voxl-inpsect-imu outputs correct values in the VIO-enabled, GPS-disabled setting. But I get invalid local position for ekf2 status in MAVlink console and "reject position mode" message when try to fly the drone with RC in position mode.
do I need to reset the PX4 firmware?
thanks