@tom thanks! It works. I had used the same solution but a wrong partition number was the culprit.
M
mbahrami
@mbahrami
Posts
-
micro SD card support -
micro SD card supportHello,
are there limitations for the micro SDK card support in RB5?
we have a rb5 pro kit w/ a 5G modem. we tried mounting the data of a 64 GB Micro SD Card SDXC (SanDisk) using a USB 3.0 microSD Card Reader but were not successful. The usb show up at
/dev/sdg. but the mounting did not work. Any input would be appreciated. -
follow-up: wlan0 mac addressHi,
is there any solution to the random wlan0 mac address of rb5?
this problem does not allow us to set a static IP on the router for qr5.
I tried the
voxl-static-ipbut it does not work.rb5:/etc/systemd/system$ voxl-static-ip 172.16.0.1 172.16.0.2 wlan0: Unknown hostAlso, the @RichieRich's solution here
https://forum.modalai.com/topic/682/how-to-stop-wlan0-mac-address-randomization/5
did not work as we do not have eth0 interface.thanks.
-
Remote ID - RB5 droneHello @tom , @Eric-Katzfey
the link to remote ID instructions does not contain any content? I was wondering if we can setup the remote ID for RB5?

Remote ID
ModalAI technical documentation for VOXL and VOXL 2 Companion Computers for PX4 and ArduPilot Obstacle Avoidance and GPS-denied navigation, assembled in the USA
ModalAI Technical Docs (docs.modalai.com)
-
gimbal integrationHello,
is there support for gimbal integration with RB5 drones? is there any limitation or recommendation in terms of connections (URART, sbus, mavlink) ?
thanks
-
problem with opkg update & opkg upgradeThank you both @Chad-Sweet and @tom for being super responsive on this technical forum.
-
problem with opkg update & opkg upgradeHi,
Apparently the default directory
http://voxl-packages.modalai.com/stableon the VOXL platforms with a system-image 3.6.0 and voxl-suite 0.5.0. is no longer available for updating the packages.I updated the directory in
/etc/opkg/opkg.conftohttp://voxl-packages.modalai.com/dists/apq8096/stable/binary-arm64/and after runningupdate && opkg upgradeI get the following package conflicts:voxl:/$ opkg upgrade Upgrading voxl-tflite-server from 0.1.8 to 0.3.1 on root. Installing apq8096-tflite (2.8.3-1) on root. Upgrading voxl-camera-server from 0.8.1 to 1.3.5 on root. Upgrading voxl-utils from 0.8.5 to 1.2.2 on root. Installing apq8096-system-tweaks (0.1.3) on root. Not downgrading package libgphoto2 on root from 2.5.26 to 0.0.4. Upgrading voxl-suite from 0.5.0 to 0.9.5 on root. Collected errors: * check_conflicts_for: The following packages conflict with apq8096-tflite: * check_conflicts_for: voxl-tflite * * check_conflicts_for: The following packages conflict with voxl-camera-server: * check_conflicts_for: voxl-utils * * check_conflicts_for: The following packages conflict with apq8096-system-tweaks: * check_conflicts_for: voxl-utils * * satisfy_dependencies_for: Cannot satisfy the following dependencies for voxl-suite: * cci-direct-support *I wonder if flashing the system image and upgrading to the most recent one is the only way to fix the conflicts.
Thanks.
/ # voxl-version cat: /etc/modalai/voxl-software-bundle-version.txt: No such file or directory -------------------------------------------------------------------------------- system-image: ModalAI 3.6.0 BUILDER: ekatzfey BUILD_TIME: 2022-02-28_23:47 kernel: #1 SMP PREEMPT Mon Feb 28 23:55:47 UTC 2022 3.18.71-perf factory-bundle: 1.0.1 (Yocto installation) -------------------------------------------------------------------------------- architecture: aarch64 processor: apq8096 os: GNU/Linux -------------------------------------------------------------------------------- voxl-suite: Package: voxl-suite Version: 0.5.0 Depends: libjpeg_turbo (>= 9.0.4), libmodal_exposure (>= 0.0.2), libmodal_json (>= 0.3.6), libmodal_pipe (>= 2.1.1), librc_math (>= 1.1.5), libvoxl_cutils (>= 0.0.2), libvoxl_io (>= 0.5.4), mavlink-camera-manager (>= 0.0.2), mongoose (>= 7.3.0), opencv (>= 4.5.2-2), openmp (>= 10.0.2), voxl-camera-calibration (>= 0.1.1), voxl-camera-server (>= 0.8.1), voxl-cpu-monitor (>= 0.2.0), voxl-dfs-server (>= 0.2.2), voxl-docker-support (>= 1.1.3), voxl-gphoto2 (>= 0.0.5), voxl-imu-server (>= 0.9.1), voxl-mavlink (>= 0.0.2), voxl-modem (>= 0.12.0), voxl-mpa-tools (>= 0.3.6), voxl-nodes (>= 0.2.0), voxl-portal (>= 0.1.2), voxl-qvio-server (>= 0.3.4), voxl-streamer (>= 0.2.6), voxl-tag-detector (>= 0.0.2), voxl-tflite (>= 2.2.3), voxl-tflite-server (>= 0.1.5), voxl-utils (>= 0.8.4), voxl-vision-px4 (>= 0.9.5), voxl-vpn (>= 0.0.3) Status: install user installed Architecture: all Installed-Time: 236 -------------------------------------------------------------------------------- / # -
MPA services for ROS Melodic/Noetic on VOXL -
MPA services for ROS Melodic/Noetic on VOXLThanks for the replay. yes, I'm trying them one by one, because our set-up is different.
but, currently, there seems to be a problem with finding the dependencies in the build of voxl-mpa-to-ros.CMake Warning at /opt/ros/indigo/share/roscpp/cmake/roscppConfig.cmake:111 (message): Project 'roscpp' specifies 'NOTFOUND/usr/include' as an include dir, which is not found. It does neither exist as an absolute directory nor in '/opt/ros/indigo/NOTFOUND/usr/include'.Not sure why
${catkin_INCLUDE_DIRS}inside CMakeLists.txt cannot be found. Eventually, I getNot selecting voxl-mpa-to-ros 0.3.6 due to incompatible architecture.if try to deploy the build ipk.I'm using voxl-emulator:V1.7 to build. I put the entire process in the following code section.
Thanks
myPC:~/git/voxl-docker/voxl-mpa-to-ros$ ls build.sh CHANGELOG deploy_to_voxl.sh LICENSE pkg catkin_ws clean.sh install_build_deps.sh make_package.sh README.md myPC:~/git/voxl-docker/voxl-mpa-to-ros$ sudo voxl-docker -i voxl-emulator:V1.7 [sudo] password for myPC: launching image: voxl-emulator:V1.7 with the following command: docker run --rm -it --net=host --privileged -w /home/root --volume=/dev/bus/usb:/dev/bus/usb -e LOCAL_USER_ID=0 -e LOCAL_USER_NAME=root -e LOCAL_GID=0 -v /home/mo/git/voxl-docker/voxl-mpa-to-ros:/home/root:rw -w /home/root voxl-emulator:V1.7 /bin/bash -l + USER_ID=0 + USER_NAME=root + GID=0 + getent group 0 root:x:0: + echo 'Starting with UID : 0' Starting with UID : 0 + useradd --shell /bin/bash -u 0 -g 0 -o -c '' -M root useradd: user 'root' already exists + addgroup root users + export HOME=/home/root + HOME=/home/root + ls -ld /home/root drwxrwxr-x 5 james host_group 4096 May 4 00:45 /home/root + echo 'root ALL=(ALL) NOPASSWD: ALL' + ls -l /etc/sudoers.d/ total 8 -rw-r--r-- 1 root root 30 Nov 23 2020 james -rw-r--r-- 1 root root 29 May 4 00:46 root + cat /etc/sudoers.d/root root ALL=(ALL) NOPASSWD: ALL + chmod 777 /tmp + chmod 711 /usr/bin/sudo + chmod +s /usr/bin/sudo + ls -l /usr/local/bin/su-exec -rwxr-xr-x 1 root root 7660 Aug 14 2018 /usr/local/bin/su-exec + ls -l /bin/bash -rwxrwxrwx 1 root root 959344 Aug 12 2018 /bin/bash + echo 'exec /usr/local/bin/su-exec root /bin/bash' -l exec /usr/local/bin/su-exec root /bin/bash -l + exec /usr/local/bin/su-exec root /bin/bash -l voxl-emulator:~$ ls CHANGELOG README.md catkin_ws deploy_to_voxl.sh make_package.sh LICENSE build.sh clean.sh install_build_deps.sh pkg voxl-emulator:~$ ./install_build_deps.sh apq8096 stable using apq8096 stable repo adding arm64 to opkg conf Downloading http://voxl-packages.modalai.com/dists/apq8096/stable/binary-arm64//Packages.gz. Updated source 'stable'. installing: libmodal-json libmodal-pipe libvoxl-cutils Installing libmodal-json (0.4.3) on root. Downloading http://voxl-packages.modalai.com/dists/apq8096/stable/binary-arm64//libmodal-json_0.4.3.ipk. Configuring libmodal-json. Installing libmodal-pipe (2.8.2) on root. Downloading http://voxl-packages.modalai.com/dists/apq8096/stable/binary-arm64//libmodal-pipe_2.8.2.ipk. Configuring libmodal-pipe. Installing libvoxl-cutils (0.1.1) on root. Downloading http://voxl-packages.modalai.com/dists/apq8096/stable/binary-arm64//libvoxl-cutils_0.1.1.ipk. Configuring libvoxl-cutils. Done installing dependencies voxl-emulator:~$ ./clean.sh voxl-emulator:~$ ./build.sh Build the current project based on platform target. Usage: ./build.sh apq8096 Build 64-bit binaries for apq8096 ./build.sh qrb5165 Build 64-bit binaries for qrb5165 voxl-emulator:~$ ./build.sh apq8096 Base path: /home/root/catkin_ws Source space: /home/root/catkin_ws/src Build space: /home/root/catkin_ws/build Devel space: /home/root/catkin_ws/devel Install space: /home/root/catkin_ws/install #### #### Running command: "cmake /home/root/catkin_ws/src -DCMAKE_BUILD_TYPE=Release -DCATKIN_DEVEL_PREFIX=/home/root/catkin_ws/devel -DCMAKE_INSTALL_PREFIX=/home/root/catkin_ws/install -G Unix Makefiles" in "/home/root/catkin_ws/build" #### -- The C compiler identification is GNU 4.9.3 -- The CXX compiler identification is GNU 4.9.3 -- Check for working C compiler: /usr/bin/cc -- Check for working C compiler: /usr/bin/cc -- works -- Detecting C compiler ABI info -- Detecting C compiler ABI info - done -- Detecting C compile features -- Detecting C compile features - done -- Check for working CXX compiler: /usr/bin/c++ -- Check for working CXX compiler: /usr/bin/c++ -- works -- Detecting CXX compiler ABI info -- Detecting CXX compiler ABI info - done -- Detecting CXX compile features -- Detecting CXX compile features - done -- Using CATKIN_DEVEL_PREFIX: /home/root/catkin_ws/devel -- Using CMAKE_PREFIX_PATH: /opt/ros/indigo -- This workspace overlays: /opt/ros/indigo -- Found PythonInterp: /usr/bin/python (found version "2.7.9") -- Using PYTHON_EXECUTABLE: /usr/bin/python -- Using default Python package layout -- Found PY_em: /usr/lib/python2.7/site-packages/em.pyc -- Using empy: /usr/lib/python2.7/site-packages/em.pyc -- Using CATKIN_ENABLE_TESTING: ON -- Call enable_testing() -- Using CATKIN_TEST_RESULTS_DIR: /home/root/catkin_ws/build/test_results -- Found gtest: gtests will be built -- Using Python nosetests: /usr/bin/nosetests-2.7 -- catkin 0.6.19 CMake Warning at /opt/ros/indigo/share/roscpp/cmake/roscppConfig.cmake:111 (message): Project 'roscpp' specifies 'NOTFOUND/usr/include' as an include dir, which is not found. It does neither exist as an absolute directory nor in '/opt/ros/indigo/NOTFOUND/usr/include'. Ask the maintainer 'Dirk Thomas <dthomas@osrfoundation.org>' to fix it. Call Stack (most recent call first): /opt/ros/indigo/share/catkin/cmake/catkinConfig.cmake:76 (find_package) CMakeLists.txt:43 (find_package) CMake Warning at /opt/ros/indigo/share/cpp_common/cmake/cpp_commonConfig.cmake:111 (message): Project 'cpp_common' specifies 'NOTFOUND/usr/include' as an include dir, which is not found. It does neither exist as an absolute directory nor in '/opt/ros/indigo/NOTFOUND/usr/include'. Ask the maintainer 'Dirk Thomas <dthomas@osrfoundation.org>' to fix it. Call Stack (most recent call first): /opt/ros/indigo/share/roscpp/cmake/roscppConfig.cmake:169 (find_package) /opt/ros/indigo/share/catkin/cmake/catkinConfig.cmake:76 (find_package) CMakeLists.txt:43 (find_package) CMake Warning at /opt/ros/indigo/share/rostime/cmake/rostimeConfig.cmake:111 (message): Project 'rostime' specifies 'NOTFOUND/usr/include' as an include dir, which is not found. It does neither exist as an absolute directory nor in '/opt/ros/indigo/NOTFOUND/usr/include'. Ask the maintainer 'Dirk Thomas <dthomas@osrfoundation.org>' to fix it. Call Stack (most recent call first): /opt/ros/indigo/share/roscpp_traits/cmake/roscpp_traitsConfig.cmake:169 (find_package) /opt/ros/indigo/share/roscpp_serialization/cmake/roscpp_serializationConfig.cmake:169 (find_package) /opt/ros/indigo/share/message_runtime/cmake/message_runtimeConfig.cmake:169 (find_package) /opt/ros/indigo/share/roscpp/cmake/roscppConfig.cmake:169 (find_package) /opt/ros/indigo/share/catkin/cmake/catkinConfig.cmake:76 (find_package) CMakeLists.txt:43 (find_package) CMake Warning at /opt/ros/indigo/share/rosconsole/cmake/rosconsoleConfig.cmake:111 (message): Project 'rosconsole' specifies 'NOTFOUND/home/ekatzfey/build/sfpro/apq8096-le-1-0-1_ap_standard_oem.git/apps_proc/poky/build/tmp-glibc/sysroots/lib32-apq8096/usr/include' as an include dir, which is not found. It does neither exist as an absolute directory nor in '/opt/ros/indigo/NOTFOUND/home/ekatzfey/build/sfpro/apq8096-le-1-0-1_ap_standard_oem.git/apps_proc/poky/build/tmp-glibc/sysroots/lib32-apq8096/usr/include'. Ask the maintainer 'Dirk Thomas <dthomas@osrfoundation.org>' to fix it. Call Stack (most recent call first): /opt/ros/indigo/share/roscpp/cmake/roscppConfig.cmake:169 (find_package) /opt/ros/indigo/share/catkin/cmake/catkinConfig.cmake:76 (find_package) CMakeLists.txt:43 (find_package) CMake Warning at /opt/ros/indigo/share/camera_info_manager/cmake/camera_info_managerConfig.cmake:111 (message): Project 'camera_info_manager' specifies 'NOTFOUND/usr/include' as an include dir, which is not found. It does neither exist as an absolute directory nor in '/opt/ros/indigo/NOTFOUND/usr/include'. Ask the maintainer 'Jack O'Quin <jack.oquin@gmail.com>, Vincent Rabaud <vincent.rabaud@gmail.com>' to fix it. Call Stack (most recent call first): /opt/ros/indigo/share/catkin/cmake/catkinConfig.cmake:76 (find_package) CMakeLists.txt:43 (find_package) CMake Warning at /opt/ros/indigo/share/pluginlib/cmake/pluginlibConfig.cmake:111 (message): Project 'pluginlib' specifies 'NOTFOUND/usr/include' as an include dir, which is not found. It does neither exist as an absolute directory nor in '/opt/ros/indigo/NOTFOUND/usr/include'. Ask the maintainer 'Mikael Arguedas <mikael@osrfoundation.org>' to fix it. Call Stack (most recent call first): /opt/ros/indigo/share/image_transport/cmake/image_transportConfig.cmake:169 (find_package) /opt/ros/indigo/share/catkin/cmake/catkinConfig.cmake:76 (find_package) CMakeLists.txt:43 (find_package) CMake Warning at /opt/ros/indigo/share/class_loader/cmake/class_loaderConfig.cmake:111 (message): Project 'class_loader' specifies 'NOTFOUND/usr/include' as an include dir, which is not found. It does neither exist as an absolute directory nor in '/opt/ros/indigo/NOTFOUND/usr/include'. Ask the maintainer 'Mikael Arguedas <mikael@osrfoundation.org>' to fix it. Call Stack (most recent call first): /opt/ros/indigo/share/pluginlib/cmake/pluginlibConfig.cmake:169 (find_package) /opt/ros/indigo/share/image_transport/cmake/image_transportConfig.cmake:169 (find_package) /opt/ros/indigo/share/catkin/cmake/catkinConfig.cmake:76 (find_package) CMakeLists.txt:43 (find_package) CMake Warning at /opt/ros/indigo/share/rospack/cmake/rospackConfig.cmake:111 (message): Project 'rospack' specifies 'NOTFOUND/usr/include' as an include dir, which is not found. It does neither exist as an absolute directory nor in '/opt/ros/indigo/NOTFOUND/usr/include'. Ask the maintainer 'Dirk Thomas <dthomas@osrfoundation.org>' to fix it. Call Stack (most recent call first): /opt/ros/indigo/share/roslib/cmake/roslibConfig.cmake:169 (find_package) /opt/ros/indigo/share/pluginlib/cmake/pluginlibConfig.cmake:169 (find_package) /opt/ros/indigo/share/image_transport/cmake/image_transportConfig.cmake:169 (find_package) /opt/ros/indigo/share/catkin/cmake/catkinConfig.cmake:76 (find_package) CMakeLists.txt:43 (find_package) CMake Warning at /opt/ros/indigo/share/nodelet/cmake/nodeletConfig.cmake:111 (message): Project 'nodelet' specifies 'NOTFOUND/home/ekatzfey/build/sfpro/apq8096-le-1-0-1_ap_standard_oem.git/apps_proc/poky/build/tmp-glibc/sysroots/lib32-apq8096/usr/include' as an include dir, which is not found. It does neither exist as an absolute directory nor in '/opt/ros/indigo/NOTFOUND/home/ekatzfey/build/sfpro/apq8096-le-1-0-1_ap_standard_oem.git/apps_proc/poky/build/tmp-glibc/sysroots/lib32-apq8096/usr/include'. Ask the maintainer 'Mikael Arguedas <mikael@osrfoundation.org>' to fix it. Call Stack (most recent call first): /opt/ros/indigo/share/catkin/cmake/catkinConfig.cmake:76 (find_package) CMakeLists.txt:43 (find_package) CMake Warning at /opt/ros/indigo/share/nodelet/cmake/nodeletConfig.cmake:111 (message): Project 'nodelet' specifies 'NOTFOUND/usr/include' as an include dir, which is not found. It does neither exist as an absolute directory nor in '/opt/ros/indigo/NOTFOUND/usr/include'. Ask the maintainer 'Mikael Arguedas <mikael@osrfoundation.org>' to fix it. Call Stack (most recent call first): /opt/ros/indigo/share/catkin/cmake/catkinConfig.cmake:76 (find_package) CMakeLists.txt:43 (find_package) CMake Warning at /opt/ros/indigo/share/bondcpp/cmake/bondcppConfig.cmake:111 (message): Project 'bondcpp' specifies 'NOTFOUND/usr/include' as an include dir, which is not found. It does neither exist as an absolute directory nor in '/opt/ros/indigo/NOTFOUND/usr/include'. Ask the maintainer 'Mikael Arguedas <mikael@osrfoundation.org>' to fix it. Call Stack (most recent call first): /opt/ros/indigo/share/nodelet/cmake/nodeletConfig.cmake:169 (find_package) /opt/ros/indigo/share/catkin/cmake/catkinConfig.cmake:76 (find_package) CMakeLists.txt:43 (find_package) CMake Warning at /opt/ros/indigo/share/tf2/cmake/tf2Config.cmake:111 (message): Project 'tf2' specifies 'NOTFOUND/usr/include' as an include dir, which is not found. It does neither exist as an absolute directory nor in '/opt/ros/indigo/NOTFOUND/usr/include'. Ask the maintainer 'Tully Foote <tfoote@osrfoundation.org>' to fix it. Call Stack (most recent call first): /opt/ros/indigo/share/catkin/cmake/catkinConfig.cmake:76 (find_package) CMakeLists.txt:43 (find_package) -- Using these message generators: gencpp;genlisp;genpy CMake Warning at /opt/ros/indigo/share/actionlib/cmake/actionlibConfig.cmake:111 (message): Project 'actionlib' specifies 'NOTFOUND/usr/include' as an include dir, which is not found. It does neither exist as an absolute directory nor in '/opt/ros/indigo/NOTFOUND/usr/include'. Ask the maintainer 'Mikael Arguedas <mikael@osrfoundation.org>' to fix it. Call Stack (most recent call first): /opt/ros/indigo/share/tf2_ros/cmake/tf2_rosConfig.cmake:169 (find_package) /opt/ros/indigo/share/catkin/cmake/catkinConfig.cmake:76 (find_package) CMakeLists.txt:43 (find_package) -- voxl_mpa_to_ros: 1 messages, 0 services -- Configuring done -- Generating done -- Build files have been written to: /home/root/catkin_ws/build #### #### Running command: "make install -j8 -l8" in "/home/root/catkin_ws/build" #### Scanning dependencies of target _voxl_mpa_to_ros_generate_messages_check_deps_AiDetection Scanning dependencies of target voxl_mpa_to_ros_node [ 13%] Building CXX object CMakeFiles/voxl_mpa_to_ros_node.dir/src/interfaces/camera_interface.cpp.o [ 13%] Building CXX object CMakeFiles/voxl_mpa_to_ros_node.dir/src/interfaces/vio_interface.cpp.o [ 20%] Building CXX object CMakeFiles/voxl_mpa_to_ros_node.dir/src/interfaces/point_cloud_interface.cpp.o [ 26%] Building CXX object CMakeFiles/voxl_mpa_to_ros_node.dir/src/interface_manager.cpp.o [ 40%] Building CXX object CMakeFiles/voxl_mpa_to_ros_node.dir/src/interfaces/ai_detection_interface.cpp.o [ 40%] Building CXX object CMakeFiles/voxl_mpa_to_ros_node.dir/src/interfaces/imu_interface.cpp.o [ 46%] Building CXX object CMakeFiles/voxl_mpa_to_ros_node.dir/src/interfaces/stereo_interface.cpp.o [ 46%] Built target _voxl_mpa_to_ros_generate_messages_check_deps_AiDetection Scanning dependencies of target voxl_mpa_to_ros_generate_messages_cpp [ 53%] Generating C++ code from voxl_mpa_to_ros/AiDetection.msg [ 53%] Built target voxl_mpa_to_ros_generate_messages_cpp Scanning dependencies of target voxl_mpa_to_ros_generate_messages_py [ 60%] Generating Python from MSG voxl_mpa_to_ros/AiDetection [ 66%] Generating Python msg __init__.py for voxl_mpa_to_ros [ 66%] Built target voxl_mpa_to_ros_generate_messages_py Scanning dependencies of target voxl_mpa_to_ros_generate_messages_lisp [ 73%] Generating Lisp code from voxl_mpa_to_ros/AiDetection.msg [ 73%] Built target voxl_mpa_to_ros_generate_messages_lisp Scanning dependencies of target voxl_mpa_to_ros_generate_messages [ 73%] Built target voxl_mpa_to_ros_generate_messages [ 80%] Building CXX object CMakeFiles/voxl_mpa_to_ros_node.dir/src/mpa_ros_node.cpp.o [ 86%] Building CXX object CMakeFiles/voxl_mpa_to_ros_node.dir/src/utils/camera_helpers.cpp.o [ 93%] Building CXX object CMakeFiles/voxl_mpa_to_ros_node.dir/src/utils/common_utils.cpp.o [100%] Linking CXX executable /home/root/catkin_ws/devel/lib/voxl_mpa_to_ros/voxl_mpa_to_ros_node /usr/lib/gcc/arm-oemllib32-linux-gnueabi/4.9.3/../../../../arm-oemllib32-linux-gnueabi/bin/ld: warning: skipping incompatible /usr/lib64/libmodal_pipe.so while searching for modal_pipe /usr/lib/gcc/arm-oemllib32-linux-gnueabi/4.9.3/../../../../arm-oemllib32-linux-gnueabi/bin/ld: warning: skipping incompatible /usr/lib64/libmodal_json.so while searching for modal_json [100%] Built target voxl_mpa_to_ros_node Install the project... -- Install configuration: "Release" -- Installing: /home/root/catkin_ws/install/_setup_util.py -- Installing: /home/root/catkin_ws/install/env.sh -- Installing: /home/root/catkin_ws/install/setup.bash -- Installing: /home/root/catkin_ws/install/setup.sh -- Installing: /home/root/catkin_ws/install/setup.zsh -- Installing: /home/root/catkin_ws/install/.rosinstall -- Installing: /home/root/catkin_ws/install/share/voxl_mpa_to_ros/msg/AiDetection.msg -- Installing: /home/root/catkin_ws/install/share/voxl_mpa_to_ros/cmake/voxl_mpa_to_ros-msg-paths.cmake -- Installing: /home/root/catkin_ws/install/include/voxl_mpa_to_ros -- Installing: /home/root/catkin_ws/install/include/voxl_mpa_to_ros/AiDetection.h -- Installing: /home/root/catkin_ws/install/share/common-lisp/ros/voxl_mpa_to_ros -- Installing: /home/root/catkin_ws/install/share/common-lisp/ros/voxl_mpa_to_ros/msg -- Installing: /home/root/catkin_ws/install/share/common-lisp/ros/voxl_mpa_to_ros/msg/AiDetection.lisp -- Installing: /home/root/catkin_ws/install/share/common-lisp/ros/voxl_mpa_to_ros/msg/_package_AiDetection.lisp -- Installing: /home/root/catkin_ws/install/share/common-lisp/ros/voxl_mpa_to_ros/msg/_package.lisp -- Installing: /home/root/catkin_ws/install/share/common-lisp/ros/voxl_mpa_to_ros/msg/voxl_mpa_to_ros-msg.asd Listing /home/root/catkin_ws/devel/lib/python2.7/site-packages/voxl_mpa_to_ros ... Compiling /home/root/catkin_ws/devel/lib/python2.7/site-packages/voxl_mpa_to_ros/__init__.py ... Listing /home/root/catkin_ws/devel/lib/python2.7/site-packages/voxl_mpa_to_ros/msg ... Compiling /home/root/catkin_ws/devel/lib/python2.7/site-packages/voxl_mpa_to_ros/msg/_AiDetection.py ... Compiling /home/root/catkin_ws/devel/lib/python2.7/site-packages/voxl_mpa_to_ros/msg/__init__.py ... -- Installing: /home/root/catkin_ws/install/lib/python2.7/site-packages/voxl_mpa_to_ros -- Installing: /home/root/catkin_ws/install/lib/python2.7/site-packages/voxl_mpa_to_ros/__init__.py -- Installing: /home/root/catkin_ws/install/lib/python2.7/site-packages/voxl_mpa_to_ros/__init__.pyc -- Installing: /home/root/catkin_ws/install/lib/python2.7/site-packages/voxl_mpa_to_ros/msg -- Installing: /home/root/catkin_ws/install/lib/python2.7/site-packages/voxl_mpa_to_ros/msg/_AiDetection.py -- Installing: /home/root/catkin_ws/install/lib/python2.7/site-packages/voxl_mpa_to_ros/msg/__init__.py -- Installing: /home/root/catkin_ws/install/lib/python2.7/site-packages/voxl_mpa_to_ros/msg/_AiDetection.pyc -- Installing: /home/root/catkin_ws/install/lib/python2.7/site-packages/voxl_mpa_to_ros/msg/__init__.pyc -- Installing: /home/root/catkin_ws/install/lib/pkgconfig/voxl_mpa_to_ros.pc -- Installing: /home/root/catkin_ws/install/share/voxl_mpa_to_ros/cmake/voxl_mpa_to_ros-msg-extras.cmake -- Installing: /home/root/catkin_ws/install/share/voxl_mpa_to_ros/cmake/voxl_mpa_to_rosConfig.cmake -- Installing: /home/root/catkin_ws/install/share/voxl_mpa_to_ros/cmake/voxl_mpa_to_rosConfig-version.cmake -- Installing: /home/root/catkin_ws/install/share/voxl_mpa_to_ros/package.xml -- Installing: /home/root/catkin_ws/install/share/voxl_mpa_to_ros/launch -- Installing: /home/root/catkin_ws/install/share/voxl_mpa_to_ros/launch/voxl_mpa_to_ros.launch -- Installing: /home/root/catkin_ws/install/lib/voxl_mpa_to_ros/voxl_mpa_to_ros_node -- Removed runtime path from "/home/root/catkin_ws/install/lib/voxl_mpa_to_ros/voxl_mpa_to_ros_node" voxl-emulator:~$ ./make_package.sh ipk Package Name: voxl-mpa-to-ros version Number: 0.3.6 starting building IPK package /usr/bin/ar: creating voxl-mpa-to-ros_0.3.6.ipk DONE voxl-emulator:~$ ls CHANGELOG README.md catkin_ws deploy_to_voxl.sh make_package.sh pkg LICENSE build.sh clean.sh install_build_deps.sh misc_files voxl-mpa-to-ros_0.3.6.ipk voxl-emulator:~$ exit logout myPC:~/git/voxl-docker/voxl-mpa-to-ros$ ./deploy_to_voxl.sh searching for ADB device checking VOXL for dpkg/opkg opkg detected voxl-mpa-to-ros_0.3.6.ipk: 1 file pushed. 2.1 MB/s (838532 bytes in 0.383s) Not selecting voxl-mpa-to-ros 0.3.6 due to incompatible architecture. Unknown package 'voxl-mpa-to-ros'. Collected errors: * opkg_install_cmd: Cannot install package voxl-mpa-to-ros. DONE -
MPA services for ROS Melodic/Noetic on VOXLHello
We have successfully built a docker container running ros noetic on VOXL. We want access to data from (and to) the MPA services inside ros nodes.
For sending control commands from a ros node to the PX4, it seems MAVROS can be modified to get it working for newer versions of ros kinetic.
But, to make VIO data (image, IMU, ...) from the MPA pipeline available inside a ros node, the voxl_mpa_to_ros seems to be distribution dependent and is built for ros indigo being run on voxl.
I was wondering what would be a workaround. what are the dependencies or requirements to make the above available inside a docker?
thanks
-
Neither of GPS and VIO data are availableThanks, @modaltb! yes, that seems to be the cause; we received two sentinel drones yesterday and for the same reason they have not had GPS signal available either. But that's ok, we don't need GPS for indoor flight tests.
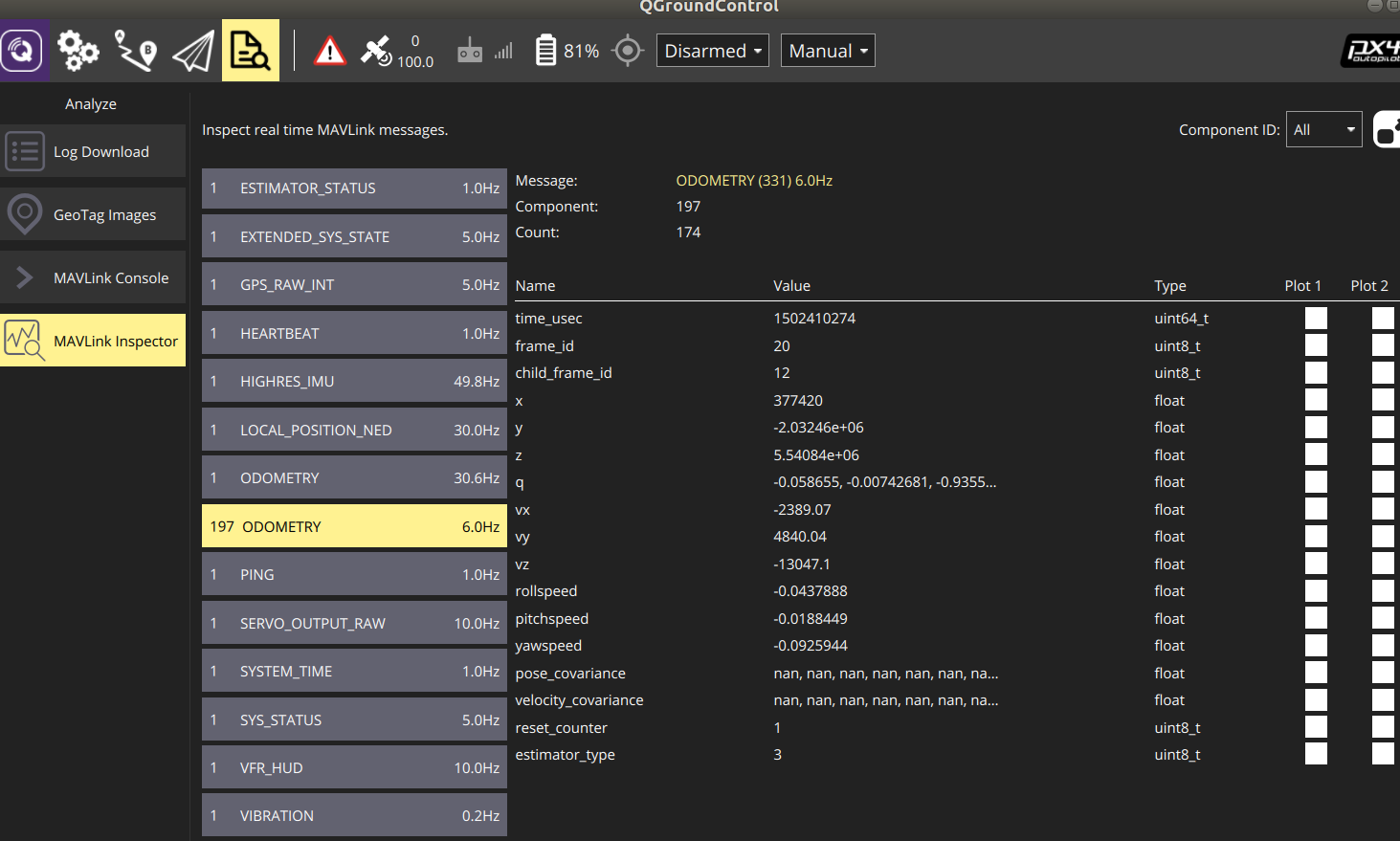
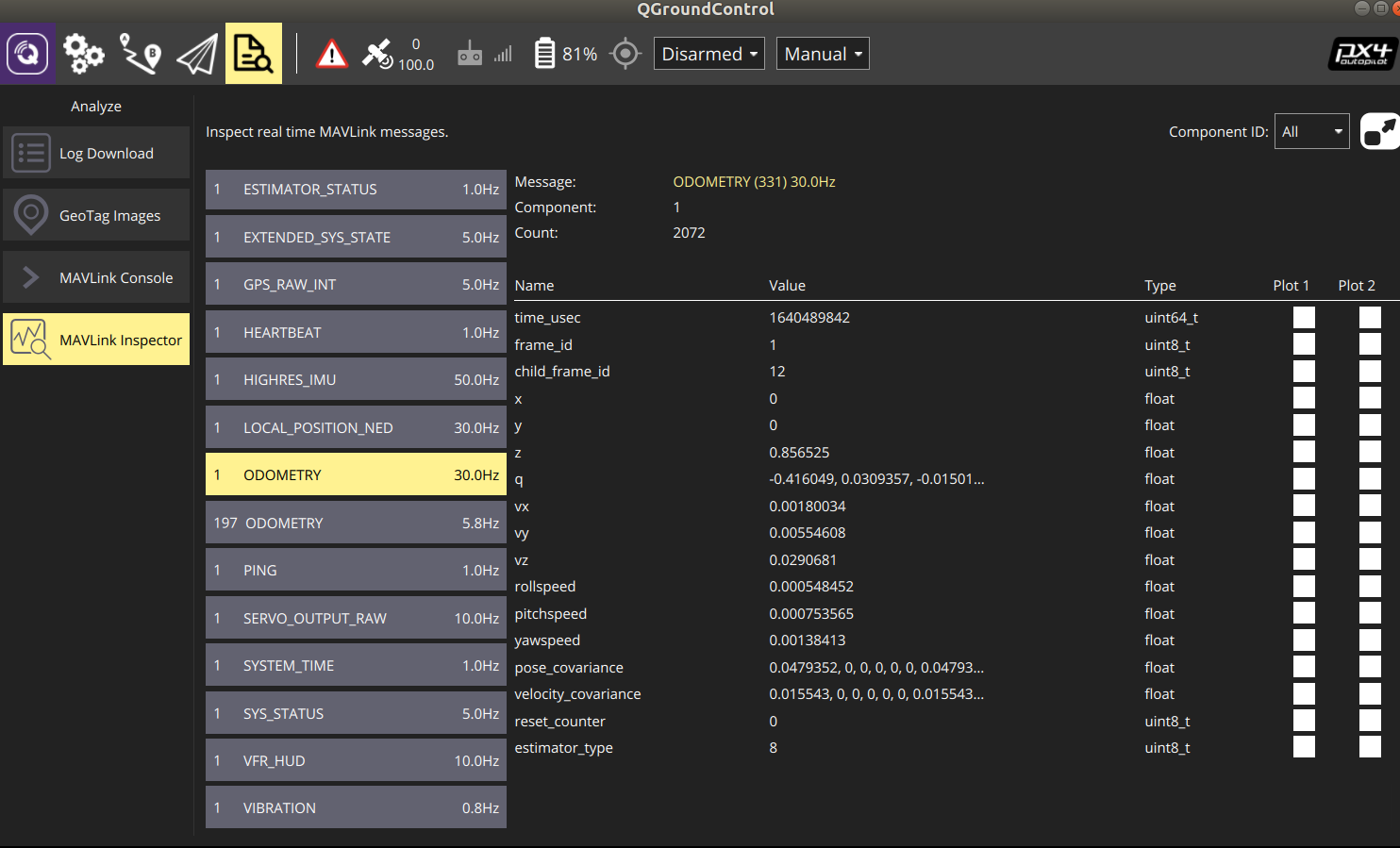
could you please comment on the odometery problem which I mentioned in the first post? I have two odemetry components with id=1 and id=197 in MAVLink Inspector in QGC. The odometry component with id=1 works fine and voxl-inpsect-imu outputs correct values in the VIO-enabled, GPS-disabled setting. But I get invalid local position for ekf2 status in MAVlink console and "reject position mode" message when try to fly the drone with RC in position mode.
do I need to reset the PX4 firmware?
thanks
-
Neither of GPS and VIO data are availableFor wiring I'm using J1012 on the flight deck which is J10 on Flight core if I'm not mistaken. I also reset the PX4 parameters to the default but still no GPS. I was wondering if there are some specific PX parameter/configuration I can check out.
-
Neither of GPS and VIO data are availablethanks for the reply.
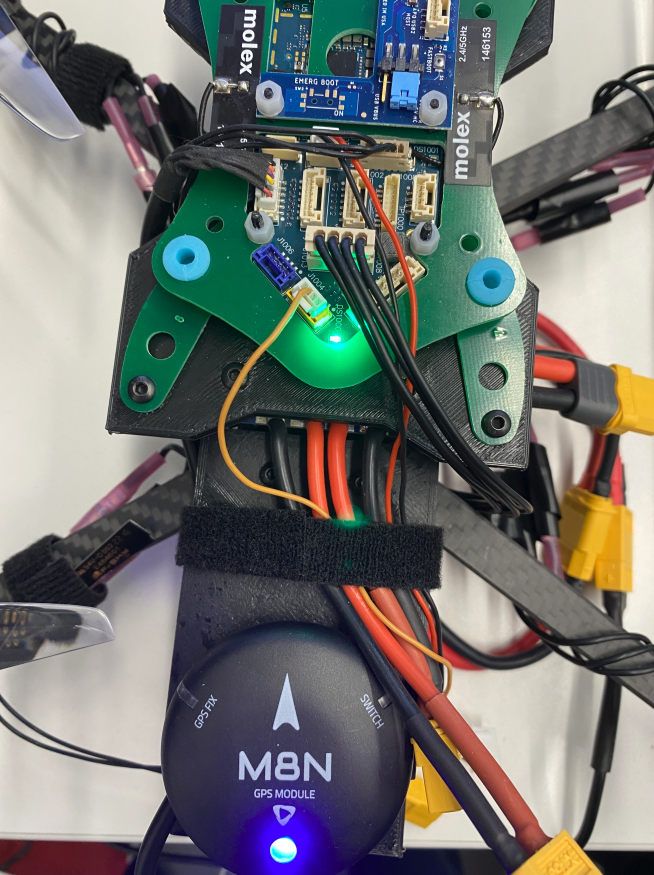
so I'm getting NO GPS Lock for Vehicle in the Mission planner of QGC and GPS_RAW_INT (lat, lon, and ...) are not changing. I tried with another M8N GPS module and got the same results.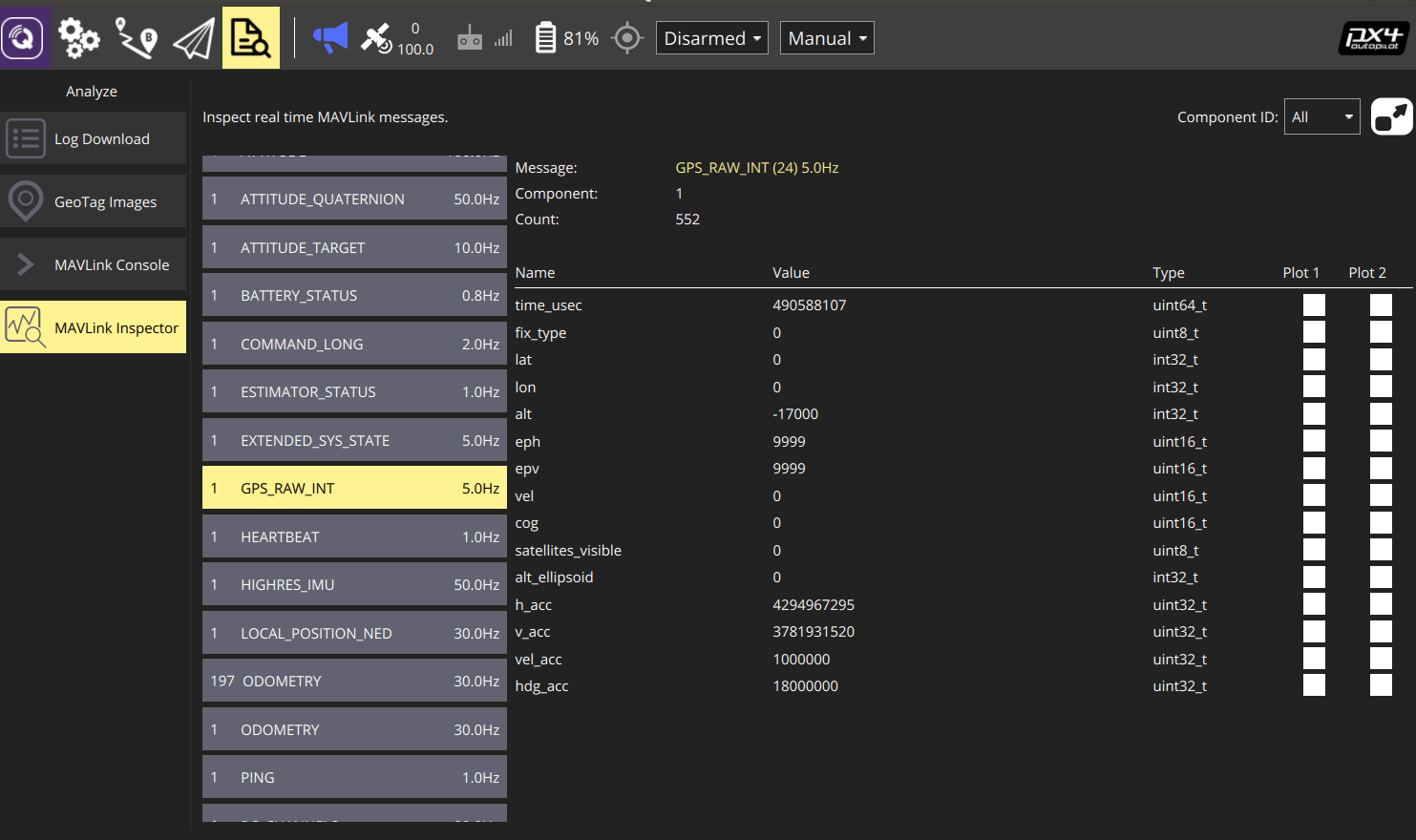
-
Neither of GPS and VIO data are availableHello,
I have trouble with unavailability of GPS and VIO data in a custom-built drone (VOXL flight deck 1, VOXL 4-in-1 ESC V2, and M8N GPS module. I'm getting no GPS and invalid local position, regardless of enabling/disabling GPS and magnetometer as it has been discussed here and I here.I'm using the flight controller firmware v 1.11.3 as it was by default on the VOXL flight deck, and PX 4 parameters, are M500_v1_param_rev_B.params with modification for VOXL ESC. I've uploaded the params I used here as well.
I was wondering if a newer firmware (v 1.12 or later) can address this issue and if the GPS module is not compatible. I also have two odometery processes in the MAVLink Inspector, where x and y pos. are 0 constantly in one odometery and the pose_covarinance is nan in the other one (photos are attached).
Thanks
dt(ms) |fix type|Sats|Latitude(deg)|Longitude(deg)| Alt(m) |Vel(m/s)|HorErr(m)|AltErr(m)| 198.9 | NO GPS | 0 | 0.0000000 | 0.0000000 | -17.0 | 0.00 | 4294967.295 | 3863464.448 |^C received SIGINT Ctrl-C closing and exitingvoxl:~$ voxl-inspect-qvio waiting for server T_imu_wrt_vio (m) |Roll Pitch Yaw (deg)| state| error_code 0.05 0.03 0.02| 0.2 -1.5 1.2| OKAY |voxl:~$ cat /etc/modalai/voxl-vision-px4.conf /** * VOXL Vision PX4 Configuration File * */ { "qgc_ip": "192.168.8.97", "en_localhost_mavlink_udp": true, "en_secondary_qgc": false, "secondary_qgc_ip": "192.168.1.214", "qgc_udp_port_number": 14550, "localhost_udp_port_number": 14551, "udp_mtu": 512, "en_vio": true, "en_voa": true, "en_send_vio_to_qgc": true, "en_send_voa_to_qgc": false, "en_set_clock_from_gps": true, "en_force_onboard_mav1_mode": true, "en_reset_px4_on_error": true, "qvio_auto_reset_quality": 0.00050000002374872565, "horizon_cal_tolerance": 0.300000011920929, "voa_upper_bound_m": 1.25, "voa_lower_bound_m": 1.25, "en_adsb": false, "adsb_uart_bus": 7, "adsb_uart_baudrate": 57600, "px4_uart_bus": 5, "px4_uart_baudrate": 921600, "offboard_mode": "off", "follow_tag_id": 0, "en_tag_fixed_frame": false, "fixed_frame_filter_len": 5, "en_transform_mavlink_pos_setpoints_from_fixed_frame": false }voxl-inspect-pose vvpx4_body_wrt_localtimestamp(ms)| Position (m) | Roll Pitch Yaw (deg) | Velocity (m/s) | angular rate (deg/s) | 1303502 | 0.07 -0.02 -0.08 | -0.3 -0.7 5.0 | -0.00 0.00 -0.00 | -0.00 -0.08 -0.16 |^Cvoxl:~$ voxl-inspect-services Service Name | Enabled | Running | CPU Usage -------------------------------------------------------------- docker-autorun | Disabled | Not Running | Not Running docker-daemon | Enabled | Running | 1.0 modallink-relink | Disabled | Not Running | Not Running voxl-camera-server | Enabled | Running | 8.1 voxl-cpu-monitor | Enabled | Running | 0.0 voxl-dfs-server | Enabled | Running | 2.0 voxl-imu-server | Enabled | Running | 0.0 voxl-modem | Disabled | Not Running | Not Running voxl-portal | Enabled | Running | 2.0 voxl-qvio-server | Enabled | Running | 4.5 voxl-streamer | Disabled | Not Running | Not Running voxl-tag-detector | Enabled | Running | 0.0 voxl-tflite-server | Disabled | Not Running | Not Running voxl-time-sync | Disabled | Not Running | Not Running voxl-vision-px4 | Enabled | Running | 4.0 voxl-wait-for-fs | Enabled | Completed | Completedthe output of
journalctl -u voxl-camera-server-- Logs begin at Thu 1970-01-01 00:00:04 UTC, end at Wed 2022-12-21 00:38:28 UTC. -- Jan 01 00:00:07 apq8096 systemd[1]: Started voxl-camera-server. Jan 01 00:00:11 apq8096 bash[2029]: ------ voxl-camera-server: Camera server is now running ~ ~ -
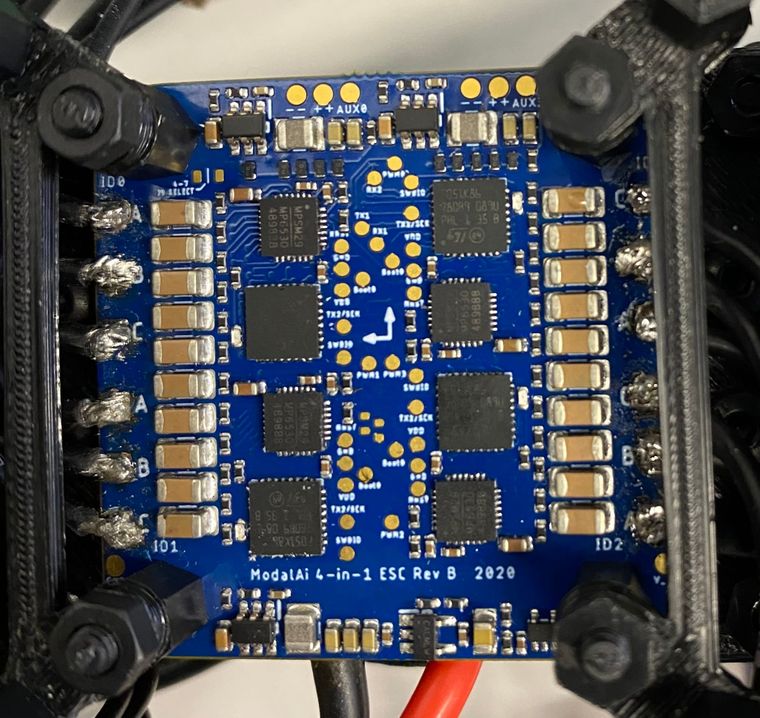
VOXL ESC calibration + T-Motor F2203.5 3550KVyes @Alex-Kushleyev, having done the test, it seems the ESC is faulty.
I should have mentioned this before, but in my tests only the motor on the ESC's ID/channel 3 was working and the rest on the channels/IDs 0, 1, 2 were not work. so just used T-motor 2203.5 3550 Kv with the Seeker V1 params and the VOXL Wall Power Supply (12V) and switched the motors on different ESC IDs/channels. Again the new motor on the ESC id=3 was working and the others not. I also changed the motors and the same results using the Seeker V1 params.
by the way the soldering did not seem to be an issue because I have checked them out by continuity tests.
-
VOXL ESC calibration + T-Motor F2203.5 3550KVthanks for the replay.
The ESC params I used for the results I shared above are
Seeker_V1_tmotor_f2203_1500kv_Param_Rev_A.I also tried with esc_params_modalai_4_in_1_revb_1400KV_TMotor_MN1806
and
Starling_V1_emax1306B_2700kv_4030_3S_param_Rev_A
and a few more which had a Kv coefficient more than 2000. But the results are the same as I have shared.That said, today I used
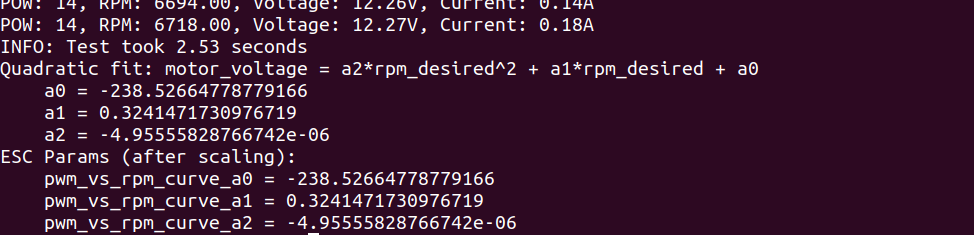
esc_params_modalai_4_in_1_revb_holybro2216_880 which has Kv=800 and a 4S battery, and this setting worked for calibration. I tried with a 3S battery but it could not provide enough power. After ~%30 PWM commanded, the RPM drops (picture attached). I wonder if there are any of these ESC params which I can use with a 3S battery as well.
PS.1. I tried with changing "vbat_nominal_mv" in the ESC params xml files but that did not work.
PS.2. I have a VOXL Flight Deck on the drone.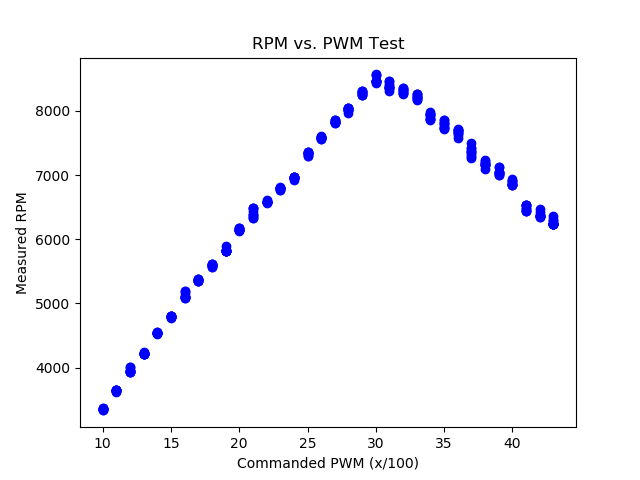
-
VOXL ESC calibration + T-Motor F2203.5 3550KVHello,
I'm using VOXL ESC Tools to calibrate VOXL 4-in-1 ESC v2 on a cutom-built airframe (~7") with T-Motor F2203.5 3550 KV and propellers 6" x 4". 3S and 4S batteries were used to power the ESC passed through a VOXL Power Module v3.
without props being installed (no load), the motors spin normally in response to ``voxl-esc-calibrate.py"
but with props, the motors spin abnormally and can not pass the initial phase. ``voxl-esc-calibrate.py" sends out 0 RPM as though the motors are not spinning.
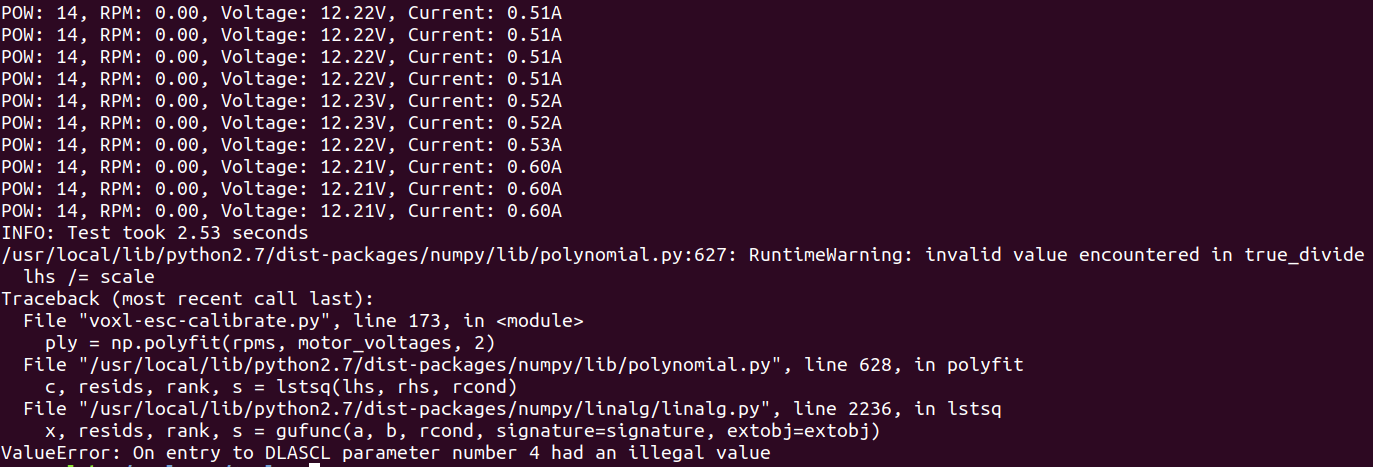
- the idle amp of the ESC was measured at 0.46 Amp.
- max power was limited on purpose here.
Is there any consideration for the setup or recommendation on VOXL ESC Tools to calibrate other than using new motors with a lower Kv to get a higher torque?
thanks
-
ESC calibration guide@Chad-Sweet Is there any alternative method for calibrating the VOXL 4-in-1 ESC v2 that does not require the propellers being installed as opposed to the VOXL ESC Tools ?
-
VOXL ESC powerHi,
We have a VOXL flight deck 1 and VOXL 4-in-1 ESC V2, and I have some questions about powering the VOXL ESC V2 and its connection with motors.the first question is how to power the ESC? is there any specific port on the Voxl flight deck and a cable by which I can power the ESC? or should we go with a PDB to do so as per usual?
Also, what capacitor do you recommend for powering the Voxl ESC v2?Regarding the hardware connections, in case I wanted to use the port J1007 - 8-Channel PWM / 4-Channel DShot ESC Output Connector of the flight deck with a cable MCBL-00004 to the PWM Breakout Board, do you sell any cable to connect PWM Breakout Board to the Voxl ESC v2?
Best,