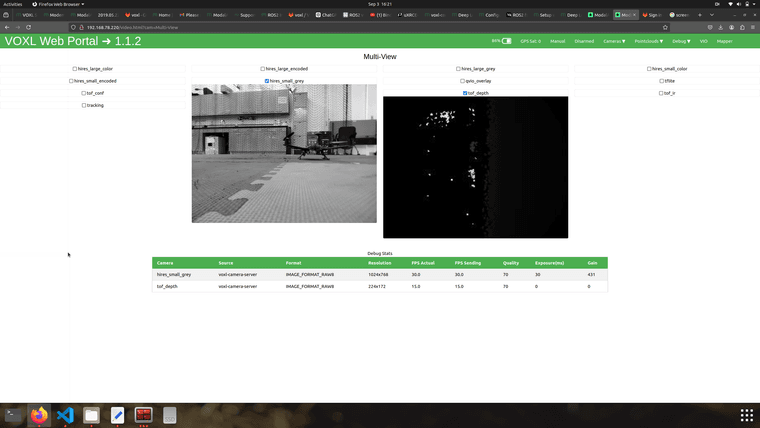
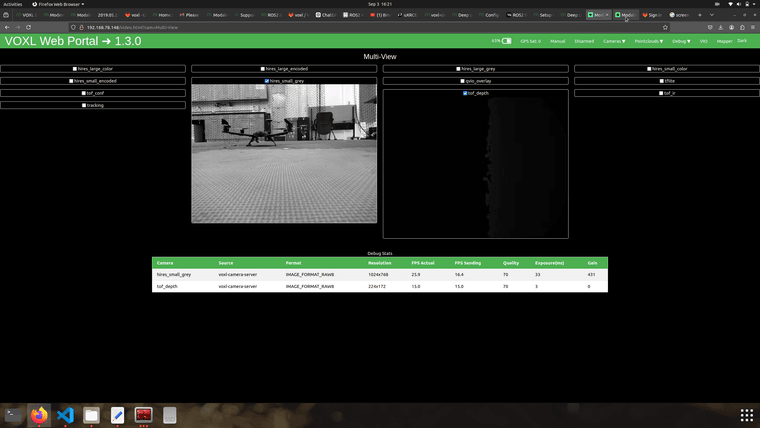
voxl camera server is aborting itself, what can be the issue. I was running my ros package on the drone and also using ros mpa package and then suddenly all the topics vanished.
when I restarted the drone the camera starts for some time and them stops showing stalled missing.
I am running tof at 15 fps also tried running at 5 but still the same issue. hires and tracking at default fps that it is configured with.
voxl2:/$ voxl-version
--------------------------------------------------------------------------------
system-image: 1.7.1-M0054-14.1a-perf-nightly-20231025
kernel: #1 SMP PREEMPT Thu Oct 26 03:25:38 UTC 2023 4.19.125
--------------------------------------------------------------------------------
hw version: M0054
--------------------------------------------------------------------------------
voxl-suite: 1.1.2
--------------------------------------------------------------------------------
Packages:
Repo: http://voxl-packages.modalai.com/ ./dists/qrb5165/sdk-1.1/binary-arm64/
Last Updated: 2023-03-02 12:59:10
WARNING: repo file has changed since last update,
packages may have originated from a different repo
List:
libmodal-cv 0.4.0
libmodal-exposure 0.1.0
libmodal-journal 0.2.2
libmodal-json 0.4.3
libmodal-pipe 2.9.2
libqrb5165-io 0.4.2
libvoxl-cci-direct 0.2.1
libvoxl-cutils 0.1.1
mv-voxl 0.1-r0
qrb5165-bind 0.1-r0
qrb5165-dfs-server 0.2.0
qrb5165-imu-server 1.0.1
qrb5165-rangefinder-server 0.1.1
qrb5165-slpi-test-sig 01-r0
qrb5165-system-tweaks 0.2.3
qrb5165-tflite 2.8.0-2
voxl-bind-spektrum 0.1.0
voxl-camera-calibration 0.5.3
voxl-camera-server 1.8.9.1
voxl-configurator 0.4.8
voxl-cpu-monitor 0.4.7
voxl-docker-support 1.3.0
voxl-elrs 0.1.3
voxl-esc 1.3.7
voxl-feature-tracker 0.3.2
voxl-flow-server 0.3.3
voxl-gphoto2-server 0.0.10
voxl-jpeg-turbo 2.1.3-5
voxl-lepton-server 1.2.0
voxl-libgphoto2 0.0.4
voxl-libuvc 1.0.7
voxl-logger 0.3.5
voxl-mavcam-manager 0.5.3
voxl-mavlink 0.1.1
voxl-mavlink-server 1.3.2
voxl-modem 1.0.8
voxl-mongoose 7.7.0-1
voxl-mpa-to-ros 0.3.7
voxl-mpa-tools 1.1.3
voxl-neopixel-manager 0.0.3
voxl-opencv 4.5.5-2
voxl-portal 0.6.3
voxl-px4 1.14.0-2.0.63
voxl-px4-imu-server 0.1.2
voxl-px4-params 0.3.3
voxl-qvio-server 1.0.0
voxl-remote-id 0.0.9
voxl-streamer 0.7.4
voxl-suite 1.1.2
voxl-tag-detector 0.0.4
voxl-tflite-server 0.3.1
voxl-utils 1.3.3
voxl-uvc-server 0.1.6
voxl-vision-hub 1.7.3
voxl2-system-image 1.7.1-r0
voxl2-wlan 1.0-r0
--------------------------------------------------------------------------------
voxl2:/$ voxl-camera-server
detected system image 1.7.1
using new imx214 defaults
=================================================================
configuration for 3 cameras:
cam #0
name: tof
sensor type: pmd-tof
isEnabled: 1
camId: 0
camId2: -1
fps: 5
en_rotate: 0
en_rotate2: 0
en_preview: 1
pre_width: 224
pre_height: 1557
en_raw_preview: 1
en_small_video: 0
small_video_width: -1
small_video_height: -1
en_large_video: 0
large_video_width: -1
large_video_height: -1
en_snapshot: 0
snap_width: -1
snap_height: -1
ae_mode: off
standby_enabled: 0
decimator: 5
independent_exposure:0
cam #1
name: hires
sensor type: imx214
isEnabled: 1
camId: 1
camId2: -1
fps: 30
en_rotate: 0
en_rotate2: 0
en_preview: 0
pre_width: 640
pre_height: 480
en_raw_preview: 0
en_small_video: 1
small_video_width: 1024
small_video_height: 768
en_large_video: 1
large_video_width: 4208
large_video_height: 3120
en_snapshot: 1
snap_width: 4208
snap_height: 3120
ae_mode: isp
standby_enabled: 0
decimator: 1
independent_exposure:0
cam #2
name: tracking
sensor type: ov7251
isEnabled: 1
camId: 2
camId2: -1
fps: 30
en_rotate: 0
en_rotate2: 0
en_preview: 1
pre_width: 640
pre_height: 480
en_raw_preview: 1
en_small_video: 0
small_video_width: -1
small_video_height: -1
en_large_video: 0
large_video_width: -1
large_video_height: -1
en_snapshot: 0
snap_width: -1
snap_height: -1
ae_mode: lme_msv
standby_enabled: 0
decimator: 1
independent_exposure:0
=================================================================
GPS server Connected
Starting Camera: tof (id #0)
Using gain limits min: 54 max: 8000
gbm_create_device(156): Info: backend name is: msm_drm
Starting Camera: hires (id #1)
Using gain limits min: 54 max: 431
WARNING: Port Def 0:
Count Min: 8
Count Actual: 16
Size: 0x180000
Buffers Contiguous: Yes
Buffer Alignment: 0
WARNING: Port Def 1:
Count Min: 4
Count Actual: 16
Size: 0x5a0000
Buffers Contiguous: No
Buffer Alignment: 0
gbm_create_device(156): Info: backend name is: msm_drm
gbm_create_device(156): Info: backend name is: msm_drm
gbm_create_device(156): Info: backend name is: msm_drm
gbm_create_device(156): Info: backend name is: msm_drm
gbm_create_device(156): Info: backend name is: msm_drm
gbm_create_device(156): Info: backend name is: msm_drm
gbm_create_device(156): Info: backend name is: msm_drm
gbm_create_device(156): Info: backend name is: msm_drm
gbm_create_device(156): Info: backend name is: msm_drm
gbm_create_device(156): Info: backend name is: msm_drm
gbm_create_device(156): Info: backend name is: msm_drm
gbm_create_device(156): Info: backend name is: msm_drm
gbm_create_device(156): Info: backend name is: msm_drm
gbm_create_device(156): Info: backend name is: msm_drm
gbm_create_device(156): Info: backend name is: msm_drm
gbm_create_device(156): Info: backend name is: msm_drm
WARNING: Port Def 0:
Count Min: 8
Count Actual: 16
Size: 0x17a0000
Buffers Contiguous: Yes
Buffer Alignment: 0
WARNING: Port Def 1:
Count Min: 4
Count Actual: 16
Size: 0x5ec000
Buffers Contiguous: No
Buffer Alignment: 0
gbm_create_device(156): Info: backend name is: msm_drm
gbm_create_device(156): Info: backend name is: msm_drm
gbm_create_device(156): Info: backend name is: msm_drm
gbm_create_device(156): Info: backend name is: msm_drm
gbm_create_device(156): Info: backend name is: msm_drm
gbm_create_device(156): Info: backend name is: msm_drm
gbm_create_device(156): Info: backend name is: msm_drm
gbm_create_device(156): Info: backend name is: msm_drm
gbm_create_device(156): Info: backend name is: msm_drm
gbm_create_device(156): Info: backend name is: msm_drm
gbm_create_device(156): Info: backend name is: msm_drm
gbm_create_device(156): Info: backend name is: msm_drm
gbm_create_device(156): Info: backend name is: msm_drm
gbm_create_device(156): Info: backend name is: msm_drm
gbm_create_device(156): Info: backend name is: msm_drm
gbm_create_device(156): Info: backend name is: msm_drm
Starting Camera: tracking (id #2)
Using gain limits min: 54 max: 3451
setting ov7251 BLC register for cam id 2
------ voxl-camera-server: Started 3 of 3 cameras
------ voxl-camera-server: Camera server is now running
Aborted