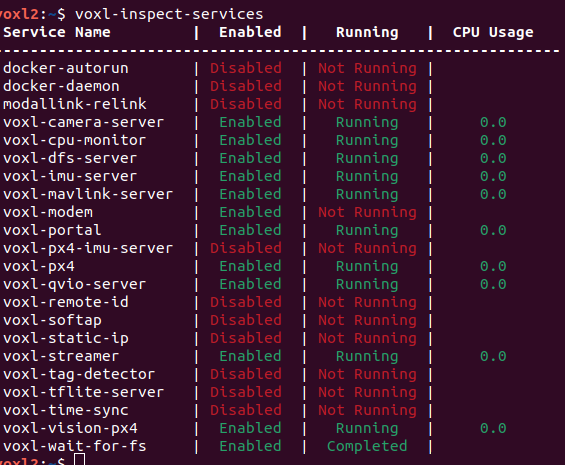
avoidance collision prevention disabled
-
@tom I have loaded the file but it still says avoidance system not available. Any ideas why?
-
@AP123 Where is it saying that message>
-
@tom
 On QGC when i try to arm the drone.
On QGC when i try to arm the drone. -
-
@AP123 Are you able to see all the expected data in voxl-portal? https://docs.modalai.com/voxl-vision-px4-collision-prevention-0_9/#voxl-portal-to-view-depth-map
-
This is what i have
-
@AP123 And when you view them , data is coming through correctly?
-
@tom No data is coming through. I tried messing with QGC IP in /etc/modalai/voxl-vision-px4.conf. But didn't work. Where can i find that value just to verify i changed it correctly? Also, could there be another reason data is not coming in?
-
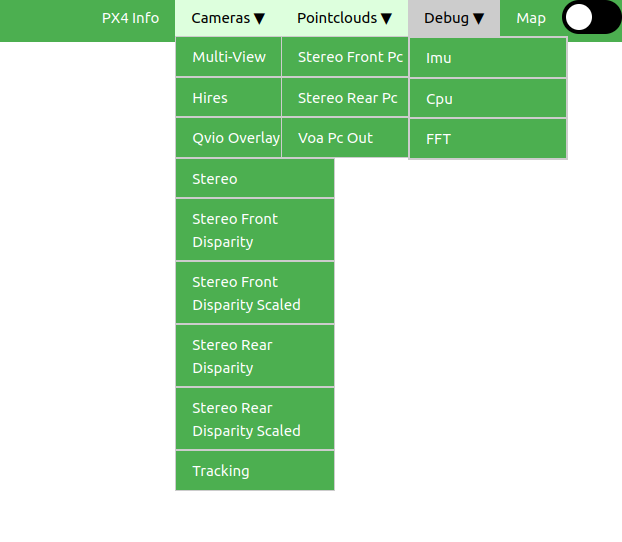
@AP123 In portal you aren't seeing anything when you select "Stereo Front Disparity" for example?
-
nope nothing
-
@AP123 What about the "stereo" one itself?
-
@tom yes i have camera feed there
-
@tom ok, i am getting data now from all off them! Although the avoidance system is still not working
-
@AP123 might be worth trying this to see if the voxl-vision-px4 is handling the avoidance data correctly: https://docs.modalai.com/voxl-vision-px4-collision-prevention-0_9/#debugging-collision-prevention
-
@tom The data is flowing properly but QGC is still saying Not Ready, and Avoidance system not ready. What else can i do?
-
@AP123 When you click on Not Ready does it give you any more info?
-
@tom it does not, I'm trying to read errors in the log but there are so many and none say anything relating to avoidance system.
-
@AP123 What hardware setup are you using? One of our drones or a custom setup?
-
@tom custom setup. I have calibrated the front stereo but the rear is giving me issues could that be why?
-
@AP123 It's possible, I would take a look here as well for some relevant info: https://docs.modalai.com/configure-extrinsics/