Starling V2 voxl-configure-mpa fails to execute voxl-esc setup_starling_v2 and voxl-elrs --scan
-
I had originally posted this in the Software Development topic in the forum however, I realized that it was the wrong location for this question so I have deleted the old topic and moved it over here.
VOXL VERSION:
-------------------------------------------------------------------------------- system-image: 1.6.2-M0054-14.1a-perf kernel: #1 SMP PREEMPT Fri May 19 22:19:33 UTC 2023 4.19.125 -------------------------------------------------------------------------------- hw version: M0054 -------------------------------------------------------------------------------- voxl-suite: 1.0.0 --------------------------------------------------------------------------------I am experiencing an issue with the VOXL 2 Starling V2 when I run the voxl-configure-mpa command I get the following output:
executing: voxl-esc setup_starling_v2 enabling bridge detected voxl-px4 is enabled Removed /etc/systemd/system/multi-user.target.wants/voxl-px4.service. detected voxl-px4 is running, stopping it now bridge enabled [INFO] Scanning for ESC... Received standard error event 2 Received standard error event 2 Couldn't configure flight_controller sensor Error calling voxl_uart_init Received standard error event 2 Received standard error event 2 Couldn't configure flight_controller sensor Error calling voxl_uart_init Received standard error event 2 Received standard error event 2 Couldn't configure flight_controller sensor Error calling voxl_uart_init Received standard error event 2 Received standard error event 2 Couldn't configure flight_controller sensor Error calling voxl_uart_init Received standard error event 2 Received standard error event 2 Couldn't configure flight_controller sensor Error calling voxl_uart_init Received standard error event 2 Received standard error event 2 Couldn't configure flight_controller sensor Error calling voxl_uart_init Received standard error event 2 Received standard error event 2 Couldn't configure flight_controller sensor Error calling voxl_uart_init Received standard error event 2 Received standard error event 2 Couldn't configure flight_controller sensor Error calling voxl_uart_init [ERROR] Unknown board detected: disabling bridge re-enabling voxl-px4 Created symlink /etc/systemd/system/multi-user.target.wants/voxl-px4.service → /etc/systemd/system/voxl-px4.service. restarting voxl-px4 bridge disabled EXITING VOXL-ESC WITH ERROR FAILED TO EXECUTE: voxl-esc setup_starling_v2And
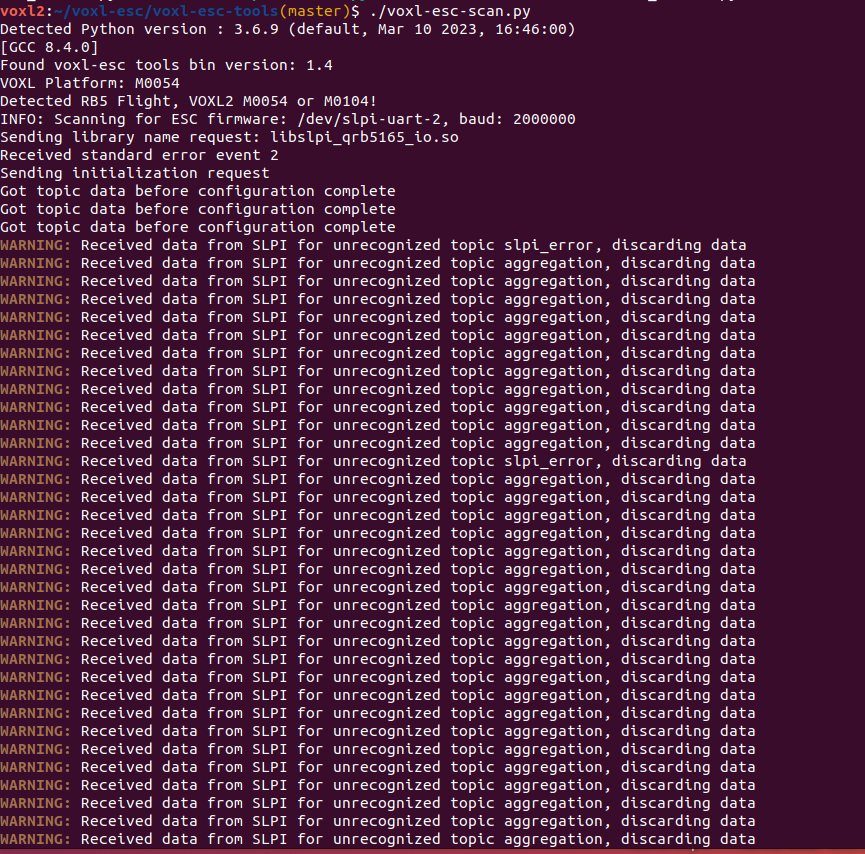
executing: voxl-elrs --scan Traceback (most recent call last): File "/usr/bin/voxl-elrs", line 718, in <module> exit(scan()) File "/usr/bin/voxl-elrs", line 468, in scan sw_version = get_version() File "/usr/bin/voxl-elrs", line 456, in get_version get_device_info() File "/usr/bin/voxl-elrs", line 273, in get_device_info bytes_read = int(result.stdout.decode().split("\n")[-3]) ValueError: invalid literal for int() with base 10: 'Sending library name request: libslpi_uart_bridge_slpi.so' FAILED TO EXECUTE: voxl-elrs --scanAdditionally each time it seems that the Starling_V2.params have to be reloaded despite being set in the previous voxl-configure-mpa run:
The following parameters about to be loaded differ from those currently loaded: NAME CURRENT NEW [1] CBRK_IO_SAFETY N/A 22027 [2] CBRK_SUPPLY_CHK N/A 894281 [3] COM_CPU_MAX N/A -1 [4] COM_OF_LOSS_T N/A 3.0 [5] NAV_ACC_RAD N/A 2.0 [6] GPS_UBX_DYNMODEL N/A 6 [7] RTL_RETURN_ALT N/A 30 [8] RTL_DESCEND_ALT N/A 10 [9] IMU_GYRO_RATEMAX N/A 800 [10] SYS_AUTOSTART N/A 4001 [11] MAV_TYPE N/A 2 [12] SENS_BOARD_ROT N/A 0 [13] BAT1_N_CELLS N/A 2 [14] BAT1_R_INTERNAL N/A 0.025 [15] BAT1_CAPACITY N/A 2900 [16] BAT1_V_CHARGED N/A 4.0 [17] BAT1_V_EMPTY N/A 2.9 [18] BAT_LOW_THR N/A 0.15 [19] BAT_CRIT_THR N/A 0.10 [20] BAT_EMERGEN_THR N/A 0.05 [21] MPC_THR_HOVER N/A 0.35 [22] THR_MDL_FAC N/A 0.9 [23] MODAL_IO_RPM_MAX N/A 15000 [24] MODAL_IO_RPM_MIN N/A 3000 [25] MODAL_IO_FUNC1 N/A 101 [26] MODAL_IO_FUNC2 N/A 104 [27] MODAL_IO_FUNC3 N/A 102 [28] MODAL_IO_FUNC4 N/A 103 [29] MODAL_IO_SDIR1 N/A 0 [30] MODAL_IO_SDIR2 N/A 0 [31] MODAL_IO_SDIR3 N/A 0 [32] MODAL_IO_SDIR4 N/A 0 [33] MODAL_IO_BAUD N/A 2000000 [34] MODAL_IO_CONFIG N/A 1 [35] MODAL_IO_MODE N/A 0 [36] MODAL_IO_REV N/A 0 [37] MODAL_IO_T_COSP N/A 0.990000009536743164 [38] MODAL_IO_T_DEAD N/A 20 [39] MODAL_IO_T_EXPO N/A 35 [40] MODAL_IO_T_MINF N/A 0.150000005960464478 [41] MODAL_IO_T_PERC N/A 90 [42] MODAL_IO_VLOG N/A 1 [43] MC_BAT_SCALE_EN N/A 0 [44] EKF2_IMU_POS_X N/A 0.0157 [45] EKF2_IMU_POS_Y N/A 0.0078 [46] EKF2_IMU_POS_Z N/A -0.0180 [47] EKF2_EV_POS_X N/A 0.0 [48] EKF2_EV_POS_Y N/A 0.0 [49] EKF2_EV_POS_Z N/A 0.0 [50] CA_AIRFRAME N/A 0 [51] CA_ROTOR_COUNT N/A 4 [52] CA_ROTOR0_PX N/A 0.085 [53] CA_ROTOR0_PY N/A 0.0625 [54] CA_ROTOR1_PX N/A -0.085 [55] CA_ROTOR1_PY N/A -0.0625 [56] CA_ROTOR2_PX N/A 0.085 [57] CA_ROTOR2_PY N/A -0.0625 [58] CA_ROTOR3_PX N/A -0.085 [59] CA_ROTOR3_PY N/A 0.0625 [60] CA_ROTOR0_AX N/A 0.0 [61] CA_ROTOR0_AY N/A 0.0 [62] CA_ROTOR1_AX N/A 0.0 [63] CA_ROTOR1_AY N/A 0.0 [64] CA_ROTOR2_AX N/A 0.0 [65] CA_ROTOR2_AY N/A 0.0 [66] CA_ROTOR3_AX N/A 0.0 [67] CA_ROTOR3_AY N/A 0.0 [68] CA_ROTOR0_KM N/A 0.05 [69] CA_ROTOR1_KM N/A 0.05 [70] CA_ROTOR2_KM N/A -0.05 [71] CA_ROTOR3_KM N/A -0.05 [72] MOT_SLEW_MAX N/A 0.0 [73] IMU_DGYRO_CUTOFF N/A 80.0 [74] IMU_ACCEL_CUTOFF N/A 80.0 [75] IMU_GYRO_CUTOFF N/A 150.0 [76] IMU_GYRO_DNF_EN N/A 1 [77] IMU_GYRO_DNF_HMC N/A 3 [78] IMU_GYRO_DNF_BW N/A 15 [79] MC_AIRMODE N/A 0 [80] MC_PITCH_P N/A 12.0 [81] MC_PITCHRATE_P N/A 0.08 [82] MC_PITCHRATE_I N/A 0.15 [83] MC_PITCHRATE_D N/A 0.0006 [84] MC_PITCHRATE_K N/A 1.0 [85] MC_ROLL_P N/A 12.0 [86] MC_ROLLRATE_P N/A 0.065 [87] MC_ROLLRATE_I N/A 0.15 [88] MC_ROLLRATE_D N/A 0.0005 [89] MC_ROLLRATE_K N/A 1.0 [90] MC_YAW_P N/A 2.8 [91] MC_YAWRATE_P N/A 0.15 [92] MC_YAWRATE_I N/A 0.5 [93] MC_YAWRATE_D N/A 0.0 [94] MC_YAWRATE_K N/A 1.0 [95] MC_ROLLRATE_MAX N/A 150.0 [96] MC_PITCHRATE_MAX N/A 150.0 [97] MC_YAWRATE_MAX N/A 150.0 [98] MPC_POS_MODE N/A 4 [99] MPC_YAW_EXPO N/A 0.30 [100] MPC_XY_MAN_EXPO N/A 0.45 [101] MPC_Z_MAN_EXPO N/A 0.10 [102] MPC_ACC_HOR N/A 3.0 [103] MPC_JERK_MAX N/A 40.0 [104] MPC_TILTMAX_AIR N/A 30.0 [105] MPC_ACC_HOR_MAX N/A 6.0 [106] MPC_ACC_UP_MAX N/A 3.0 [107] MPC_ACC_DOWN_MAX N/A 3.0 [108] MPC_VEL_MANUAL N/A 3.0 [109] MPC_XY_VEL_MAX N/A 3.0 [110] MPC_XY_CRUISE N/A 3.0 [111] MPC_Z_VEL_MAX_DN N/A 1.0 [112] MPC_Z_VEL_MAX_UP N/A 1.0 [113] MPC_LAND_SPEED N/A 1.0 [114] MPC_THR_MAX N/A 0.70 [115] MPC_THR_MIN N/A 0.08 [116] MPC_MANTHR_MIN N/A 0.08 [117] MPC_XY_P N/A 3.50 [118] MPC_XY_VEL_P_ACC N/A 3.00 [119] MPC_XY_VEL_I_ACC N/A 0.10 [120] MPC_XY_VEL_D_ACC N/A 0.00 [121] MPC_Z_P N/A 5.0 [122] MPC_Z_VEL_P_ACC N/A 8.0 [123] MPC_Z_VEL_I_ACC N/A 2.0 [124] MPC_Z_VEL_D_ACC N/A 0currently.0 [125] MPC_TKO_RAMP_T N/A 2.00 [126] MPC_TKO_SPEED N/A 1.50 [127] COM_SPOOLUP_TIME N/A 1.0 [128] LNDMC_ROT_MAX N/A 30.0 [129] COM_DISARM_LAND N/A 0.1 [130] COM_DISARM_PRFLT N/A 20 [INFO] Setting params... [INFO] Px4 parameter configuration successful!What I have done to fix the issue:
-
apt update && apt upgrade
-
disabled voxl-px4 and rebooted before running voxl-configure-mpa again and same result
I'm not sure how to fix this issue and would appreciate any help. I am concerned that if I attempt to fly the drone it will fail due to the configuration failing.
*Side Note: QGroundControl also does not work
Edit 1:
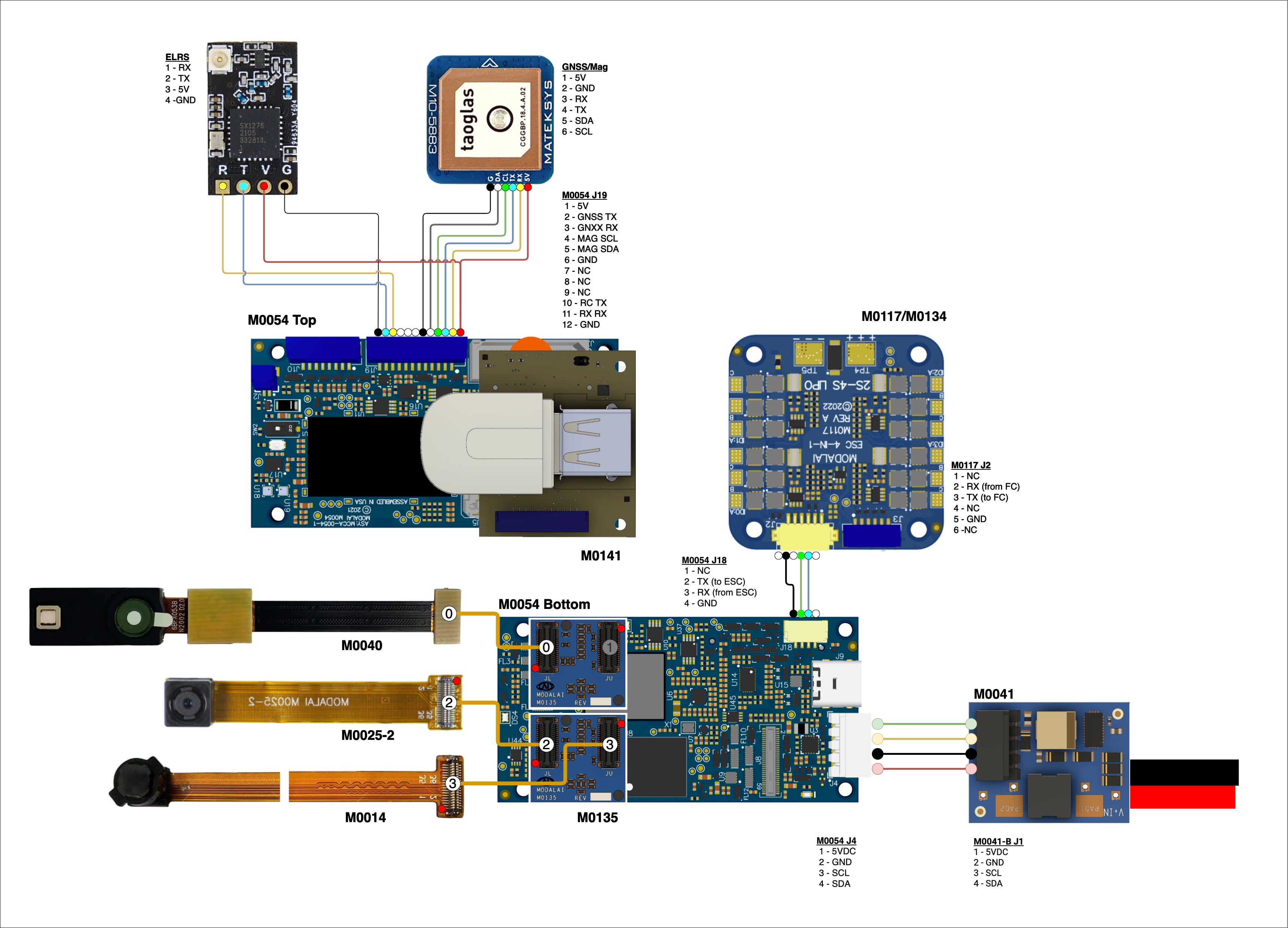
My post has been partially answered by this post https://forum.modalai.com/topic/2805/voxl-configure-mpa-failled-on-voxl-esc-step as they are experiencing the same issues I am having at each step. However, in addition to their problem the voxl-elrs --scan does not work for me. However the cables look like they are all present based on the provided diagram https://docs.modalai.com/images/starling-v2/D0005-compute-wiring-d.jpg. -
-
I had originally posted this in the Software Development topic in the forum however, I realized that it was the wrong location for this question so I have deleted the old topic and moved it over here.
VOXL VERSION:
-------------------------------------------------------------------------------- system-image: 1.6.2-M0054-14.1a-perf kernel: #1 SMP PREEMPT Fri May 19 22:19:33 UTC 2023 4.19.125 -------------------------------------------------------------------------------- hw version: M0054 -------------------------------------------------------------------------------- voxl-suite: 1.0.0 --------------------------------------------------------------------------------I am experiencing an issue with the VOXL 2 Starling V2 when I run the voxl-configure-mpa command I get the following output:
executing: voxl-esc setup_starling_v2 enabling bridge detected voxl-px4 is enabled Removed /etc/systemd/system/multi-user.target.wants/voxl-px4.service. detected voxl-px4 is running, stopping it now bridge enabled [INFO] Scanning for ESC... Received standard error event 2 Received standard error event 2 Couldn't configure flight_controller sensor Error calling voxl_uart_init Received standard error event 2 Received standard error event 2 Couldn't configure flight_controller sensor Error calling voxl_uart_init Received standard error event 2 Received standard error event 2 Couldn't configure flight_controller sensor Error calling voxl_uart_init Received standard error event 2 Received standard error event 2 Couldn't configure flight_controller sensor Error calling voxl_uart_init Received standard error event 2 Received standard error event 2 Couldn't configure flight_controller sensor Error calling voxl_uart_init Received standard error event 2 Received standard error event 2 Couldn't configure flight_controller sensor Error calling voxl_uart_init Received standard error event 2 Received standard error event 2 Couldn't configure flight_controller sensor Error calling voxl_uart_init Received standard error event 2 Received standard error event 2 Couldn't configure flight_controller sensor Error calling voxl_uart_init [ERROR] Unknown board detected: disabling bridge re-enabling voxl-px4 Created symlink /etc/systemd/system/multi-user.target.wants/voxl-px4.service → /etc/systemd/system/voxl-px4.service. restarting voxl-px4 bridge disabled EXITING VOXL-ESC WITH ERROR FAILED TO EXECUTE: voxl-esc setup_starling_v2And
executing: voxl-elrs --scan Traceback (most recent call last): File "/usr/bin/voxl-elrs", line 718, in <module> exit(scan()) File "/usr/bin/voxl-elrs", line 468, in scan sw_version = get_version() File "/usr/bin/voxl-elrs", line 456, in get_version get_device_info() File "/usr/bin/voxl-elrs", line 273, in get_device_info bytes_read = int(result.stdout.decode().split("\n")[-3]) ValueError: invalid literal for int() with base 10: 'Sending library name request: libslpi_uart_bridge_slpi.so' FAILED TO EXECUTE: voxl-elrs --scanAdditionally each time it seems that the Starling_V2.params have to be reloaded despite being set in the previous voxl-configure-mpa run:
The following parameters about to be loaded differ from those currently loaded: NAME CURRENT NEW [1] CBRK_IO_SAFETY N/A 22027 [2] CBRK_SUPPLY_CHK N/A 894281 [3] COM_CPU_MAX N/A -1 [4] COM_OF_LOSS_T N/A 3.0 [5] NAV_ACC_RAD N/A 2.0 [6] GPS_UBX_DYNMODEL N/A 6 [7] RTL_RETURN_ALT N/A 30 [8] RTL_DESCEND_ALT N/A 10 [9] IMU_GYRO_RATEMAX N/A 800 [10] SYS_AUTOSTART N/A 4001 [11] MAV_TYPE N/A 2 [12] SENS_BOARD_ROT N/A 0 [13] BAT1_N_CELLS N/A 2 [14] BAT1_R_INTERNAL N/A 0.025 [15] BAT1_CAPACITY N/A 2900 [16] BAT1_V_CHARGED N/A 4.0 [17] BAT1_V_EMPTY N/A 2.9 [18] BAT_LOW_THR N/A 0.15 [19] BAT_CRIT_THR N/A 0.10 [20] BAT_EMERGEN_THR N/A 0.05 [21] MPC_THR_HOVER N/A 0.35 [22] THR_MDL_FAC N/A 0.9 [23] MODAL_IO_RPM_MAX N/A 15000 [24] MODAL_IO_RPM_MIN N/A 3000 [25] MODAL_IO_FUNC1 N/A 101 [26] MODAL_IO_FUNC2 N/A 104 [27] MODAL_IO_FUNC3 N/A 102 [28] MODAL_IO_FUNC4 N/A 103 [29] MODAL_IO_SDIR1 N/A 0 [30] MODAL_IO_SDIR2 N/A 0 [31] MODAL_IO_SDIR3 N/A 0 [32] MODAL_IO_SDIR4 N/A 0 [33] MODAL_IO_BAUD N/A 2000000 [34] MODAL_IO_CONFIG N/A 1 [35] MODAL_IO_MODE N/A 0 [36] MODAL_IO_REV N/A 0 [37] MODAL_IO_T_COSP N/A 0.990000009536743164 [38] MODAL_IO_T_DEAD N/A 20 [39] MODAL_IO_T_EXPO N/A 35 [40] MODAL_IO_T_MINF N/A 0.150000005960464478 [41] MODAL_IO_T_PERC N/A 90 [42] MODAL_IO_VLOG N/A 1 [43] MC_BAT_SCALE_EN N/A 0 [44] EKF2_IMU_POS_X N/A 0.0157 [45] EKF2_IMU_POS_Y N/A 0.0078 [46] EKF2_IMU_POS_Z N/A -0.0180 [47] EKF2_EV_POS_X N/A 0.0 [48] EKF2_EV_POS_Y N/A 0.0 [49] EKF2_EV_POS_Z N/A 0.0 [50] CA_AIRFRAME N/A 0 [51] CA_ROTOR_COUNT N/A 4 [52] CA_ROTOR0_PX N/A 0.085 [53] CA_ROTOR0_PY N/A 0.0625 [54] CA_ROTOR1_PX N/A -0.085 [55] CA_ROTOR1_PY N/A -0.0625 [56] CA_ROTOR2_PX N/A 0.085 [57] CA_ROTOR2_PY N/A -0.0625 [58] CA_ROTOR3_PX N/A -0.085 [59] CA_ROTOR3_PY N/A 0.0625 [60] CA_ROTOR0_AX N/A 0.0 [61] CA_ROTOR0_AY N/A 0.0 [62] CA_ROTOR1_AX N/A 0.0 [63] CA_ROTOR1_AY N/A 0.0 [64] CA_ROTOR2_AX N/A 0.0 [65] CA_ROTOR2_AY N/A 0.0 [66] CA_ROTOR3_AX N/A 0.0 [67] CA_ROTOR3_AY N/A 0.0 [68] CA_ROTOR0_KM N/A 0.05 [69] CA_ROTOR1_KM N/A 0.05 [70] CA_ROTOR2_KM N/A -0.05 [71] CA_ROTOR3_KM N/A -0.05 [72] MOT_SLEW_MAX N/A 0.0 [73] IMU_DGYRO_CUTOFF N/A 80.0 [74] IMU_ACCEL_CUTOFF N/A 80.0 [75] IMU_GYRO_CUTOFF N/A 150.0 [76] IMU_GYRO_DNF_EN N/A 1 [77] IMU_GYRO_DNF_HMC N/A 3 [78] IMU_GYRO_DNF_BW N/A 15 [79] MC_AIRMODE N/A 0 [80] MC_PITCH_P N/A 12.0 [81] MC_PITCHRATE_P N/A 0.08 [82] MC_PITCHRATE_I N/A 0.15 [83] MC_PITCHRATE_D N/A 0.0006 [84] MC_PITCHRATE_K N/A 1.0 [85] MC_ROLL_P N/A 12.0 [86] MC_ROLLRATE_P N/A 0.065 [87] MC_ROLLRATE_I N/A 0.15 [88] MC_ROLLRATE_D N/A 0.0005 [89] MC_ROLLRATE_K N/A 1.0 [90] MC_YAW_P N/A 2.8 [91] MC_YAWRATE_P N/A 0.15 [92] MC_YAWRATE_I N/A 0.5 [93] MC_YAWRATE_D N/A 0.0 [94] MC_YAWRATE_K N/A 1.0 [95] MC_ROLLRATE_MAX N/A 150.0 [96] MC_PITCHRATE_MAX N/A 150.0 [97] MC_YAWRATE_MAX N/A 150.0 [98] MPC_POS_MODE N/A 4 [99] MPC_YAW_EXPO N/A 0.30 [100] MPC_XY_MAN_EXPO N/A 0.45 [101] MPC_Z_MAN_EXPO N/A 0.10 [102] MPC_ACC_HOR N/A 3.0 [103] MPC_JERK_MAX N/A 40.0 [104] MPC_TILTMAX_AIR N/A 30.0 [105] MPC_ACC_HOR_MAX N/A 6.0 [106] MPC_ACC_UP_MAX N/A 3.0 [107] MPC_ACC_DOWN_MAX N/A 3.0 [108] MPC_VEL_MANUAL N/A 3.0 [109] MPC_XY_VEL_MAX N/A 3.0 [110] MPC_XY_CRUISE N/A 3.0 [111] MPC_Z_VEL_MAX_DN N/A 1.0 [112] MPC_Z_VEL_MAX_UP N/A 1.0 [113] MPC_LAND_SPEED N/A 1.0 [114] MPC_THR_MAX N/A 0.70 [115] MPC_THR_MIN N/A 0.08 [116] MPC_MANTHR_MIN N/A 0.08 [117] MPC_XY_P N/A 3.50 [118] MPC_XY_VEL_P_ACC N/A 3.00 [119] MPC_XY_VEL_I_ACC N/A 0.10 [120] MPC_XY_VEL_D_ACC N/A 0.00 [121] MPC_Z_P N/A 5.0 [122] MPC_Z_VEL_P_ACC N/A 8.0 [123] MPC_Z_VEL_I_ACC N/A 2.0 [124] MPC_Z_VEL_D_ACC N/A 0currently.0 [125] MPC_TKO_RAMP_T N/A 2.00 [126] MPC_TKO_SPEED N/A 1.50 [127] COM_SPOOLUP_TIME N/A 1.0 [128] LNDMC_ROT_MAX N/A 30.0 [129] COM_DISARM_LAND N/A 0.1 [130] COM_DISARM_PRFLT N/A 20 [INFO] Setting params... [INFO] Px4 parameter configuration successful!What I have done to fix the issue:
-
apt update && apt upgrade
-
disabled voxl-px4 and rebooted before running voxl-configure-mpa again and same result
I'm not sure how to fix this issue and would appreciate any help. I am concerned that if I attempt to fly the drone it will fail due to the configuration failing.
*Side Note: QGroundControl also does not work
Edit 1:
My post has been partially answered by this post https://forum.modalai.com/topic/2805/voxl-configure-mpa-failled-on-voxl-esc-step as they are experiencing the same issues I am having at each step. However, in addition to their problem the voxl-elrs --scan does not work for me. However the cables look like they are all present based on the provided diagram https://docs.modalai.com/images/starling-v2/D0005-compute-wiring-d.jpg. -
-
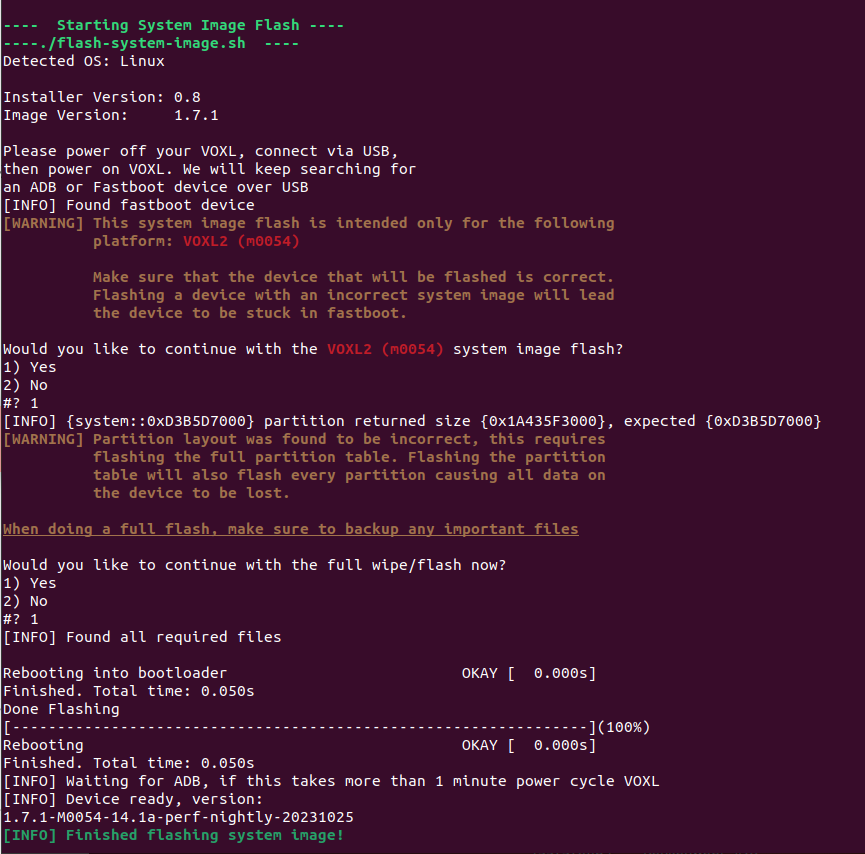
@Erik-Priest I would recommend trying a "factory flash" of the SDK:
cd voxl2_SDK_1.0.0
cd system-image
./flash-system-image.sh -fcd ..
cd voxl-suite
./offline-install.shadb shell
This will lose your calibration files but i can provide them to you
-
@tom I have preformed the tasks and everything successfully ran. Where can I find the configuration files, is it available on the same download page as the sdk download?
-
@Erik-Priest If you provide me the serial number of your Starling I can provide them to you. The serial number should be located on the bottom of the frame and will be in the form M2X00000XXX
-
@tom The serial number is M2100000FT2, let know if its better to send as a private message if possible.
-
S smilon referenced this topic on
-
S smilon referenced this topic on
-
@Erik-Priest I'll send you an email to your address on file with the forum.
Hi @tom, we are facing a similar problem on two boards that we have, and we solved the issue by following your suggestions. However, we no longer have the calibration files. Would it be possible to also obtain the calibration files? The serials are : M2100000J2R and M22000003EV
-
R Riccardo Franceschini referenced this topic on
-
Hi @tom, we are facing a similar problem on two boards that we have, and we solved the issue by following your suggestions. However, we no longer have the calibration files. Would it be possible to also obtain the calibration files? The serials are : M2100000J2R and M22000003EV
@Riccardo-Franceschini We store calibration data by the serial number of the drone itself not the serial number of the voxl2 board. Can you send me the serial numbers of the drone themselves? I believe on starling they are on the bottom of the frame.
-
@Riccardo-Franceschini We store calibration data by the serial number of the drone itself not the serial number of the voxl2 board. Can you send me the serial numbers of the drone themselves? I believe on starling they are on the bottom of the frame.
-
Hi @tom ,
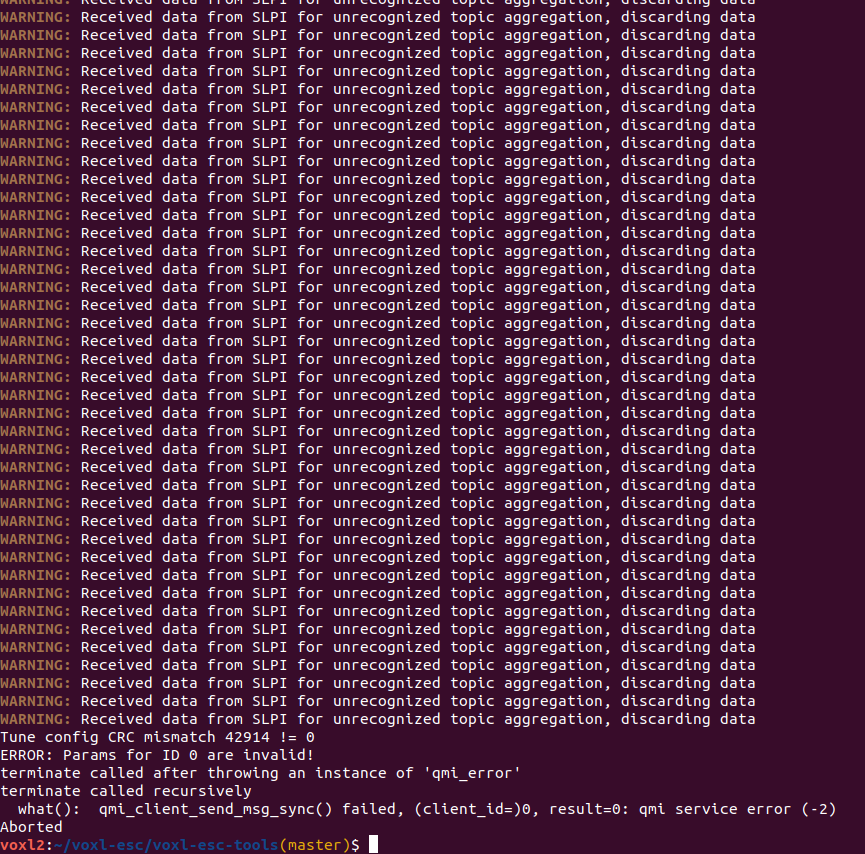
We are having similar issue with Starling, problem contacting ESC.
Multiple flash with different SDK version all successful, can run spin which does spin all motors, however cannot arm from controllerModel number: M23000001JV
-
@Vin make sure you stop PX4 before running the voxl-esc tools directly. Can you please confirm that you did it?
You can check if px4 is running:
systemctl is-active voxl-px4stop px4:
systemctl stop voxl-px4 -
@Vin make sure you stop PX4 before running the voxl-esc tools directly. Can you please confirm that you did it?
You can check if px4 is running:
systemctl is-active voxl-px4stop px4:
systemctl stop voxl-px4Thanks @Alex-Kushleyev,
The issue with voxl-esc as you have indicated was to do with voxl-px4 and would resolve by stopping voxl-p4.
There was some sort of partition layout being in correct so ended up doing full wipe and thus RC would not ARM due to calibration required.
As /data/ partition gets wiped out along with all the factory calibration files.
Ended up doing Calibration as described here
https://docs.modalai.com/px4-calibrate-sensors/Now RC can talk and ARM.
Are these files available somewhere to reset back to factory state?
-
Thanks @Alex-Kushleyev,
The issue with voxl-esc as you have indicated was to do with voxl-px4 and would resolve by stopping voxl-p4.
There was some sort of partition layout being in correct so ended up doing full wipe and thus RC would not ARM due to calibration required.
As /data/ partition gets wiped out along with all the factory calibration files.
Ended up doing Calibration as described here
https://docs.modalai.com/px4-calibrate-sensors/Now RC can talk and ARM.
Are these files available somewhere to reset back to factory state?
-
@Vin If you can provide the serial number of your Starling (located on bottom of frame, in form MXX00000XXX) I can provide you your cam cal files
Thanks @tom
Serial Number: M23000001JV
Do we know what are the right propellers for Starling drone.
From what I could make out would it be Mavic-Mini-2-Propellers-Set 4726
Trying to get back to a state where position hold is stable
-
Thanks @tom
Serial Number: M23000001JV
Do we know what are the right propellers for Starling drone.
From what I could make out would it be Mavic-Mini-2-Propellers-Set 4726Trying to get back to a state where position hold is stable
-
Thanks @tom
Serial Number: M23000001JV
Do we know what are the right propellers for Starling drone.
From what I could make out would it be Mavic-Mini-2-Propellers-Set 4726Trying to get back to a state where position hold is stable
-
Thanks @tom much appreciated. Received the file.
Was following the instructions as mentioned here https://docs.modalai.com/calibrate-cameras/ for better understanding of calibration files.
{kind=link}
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login