Voxl not connecting to QGC
-
Hello,
I have gone through the quickstart process and can ssh into my voxl m500 drone, but it does not automatically connect to QCG. I installed qcg using the instructions here for Linux. I am on Ubuntu 20.04. My desktop has two ethernet ports and a wifi card. I tried following the steps in this forum post, but it does not appear to be helping.
I tried running with the default
voxl-vision-px4and I tried setting up a new one withvoxl-configure-vision-px4. I've tried with my ethernet connection both enabled and disabled. In the forum post I linked above, the solution was to input the ethernet ip into thevoxl-vision-px4config, but this does not make sense to me as the connection is happening over wifi. However, I tried with both the ethernet and the wifi ip's of my desktop. In all cases I reset the system withsystemctl restart voxl-vision-px4and have also tried power cycling my desktop.Desktop Wifi IP
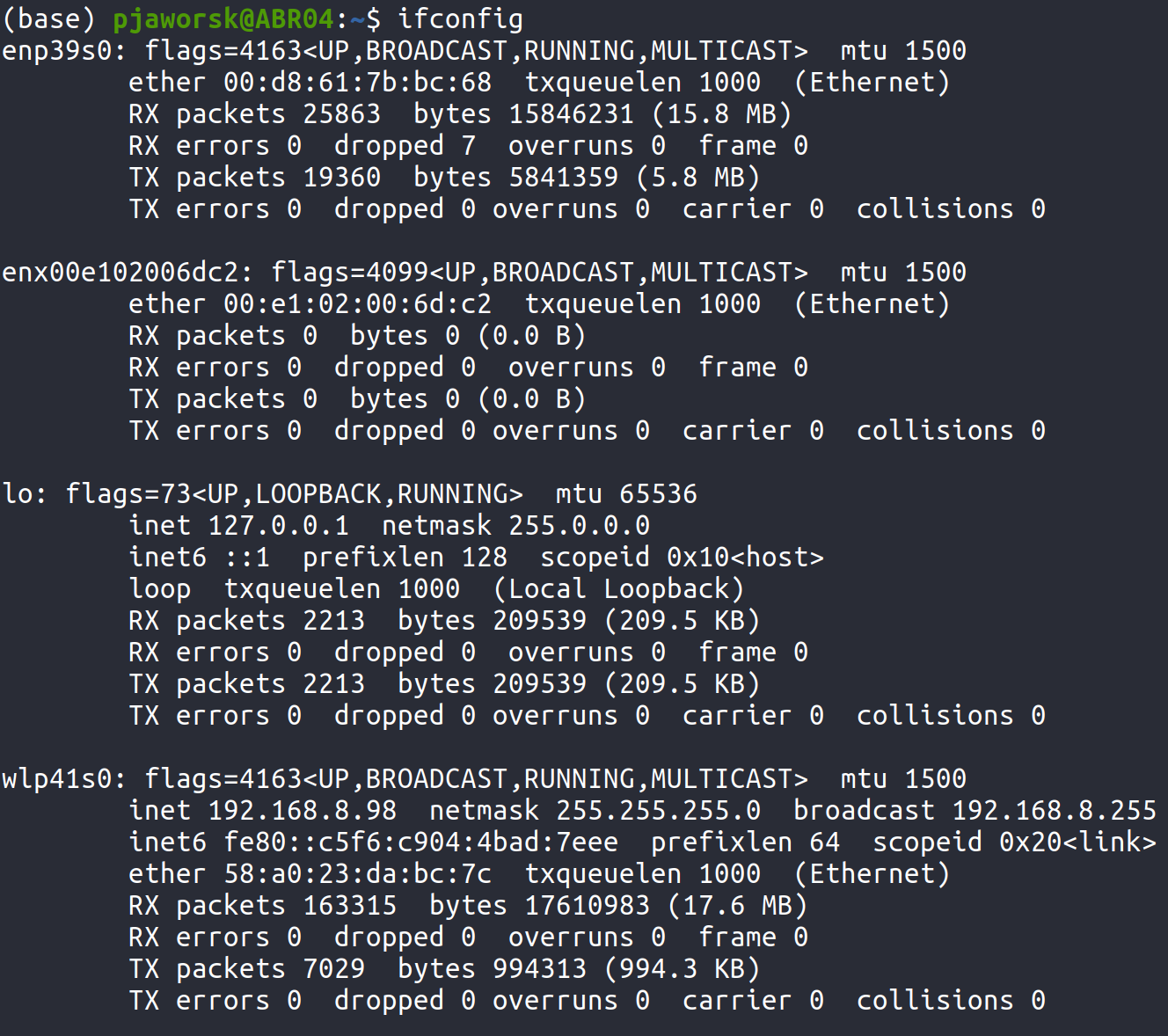
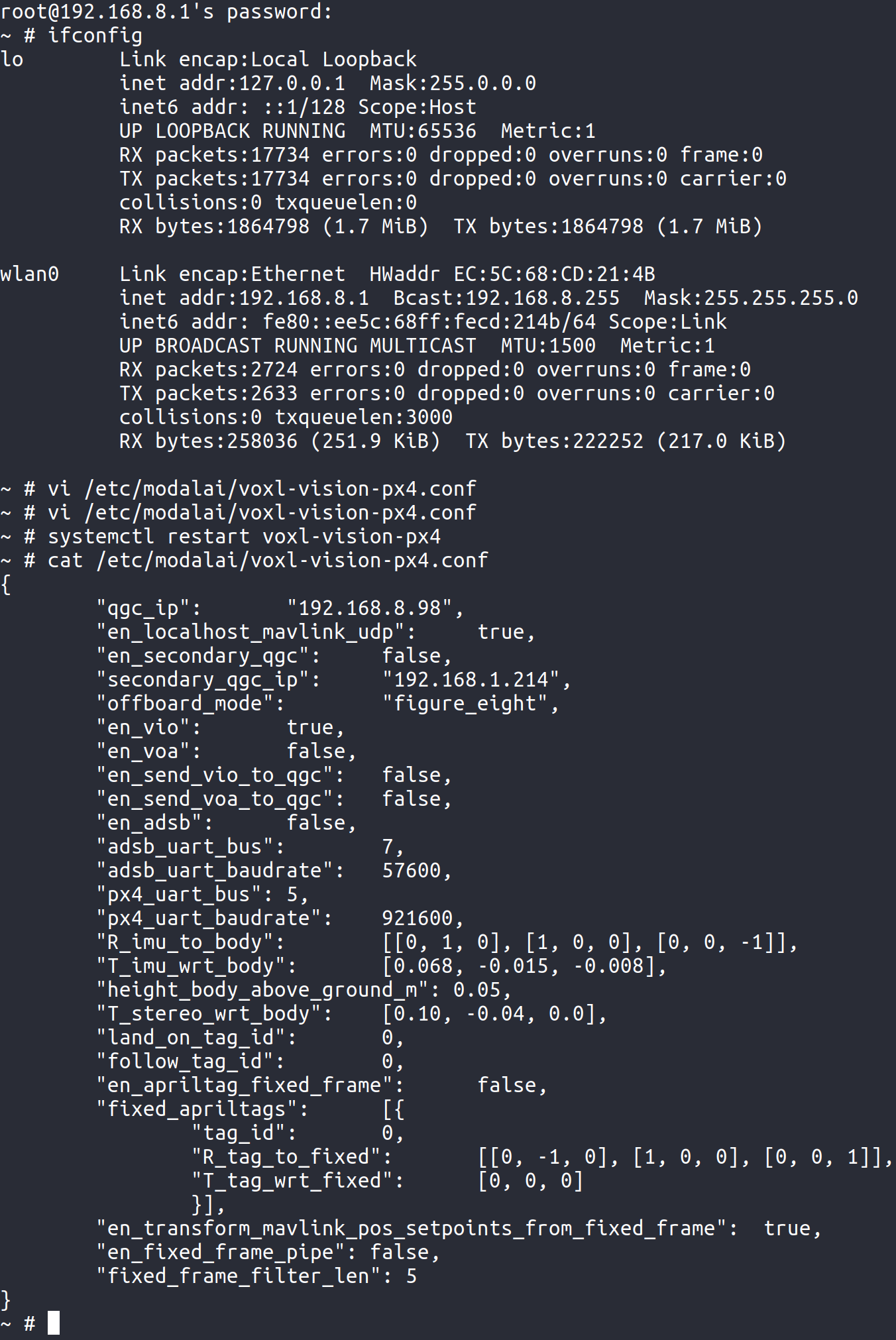
VOXL with WIFI IP
Desktop ethernet IP
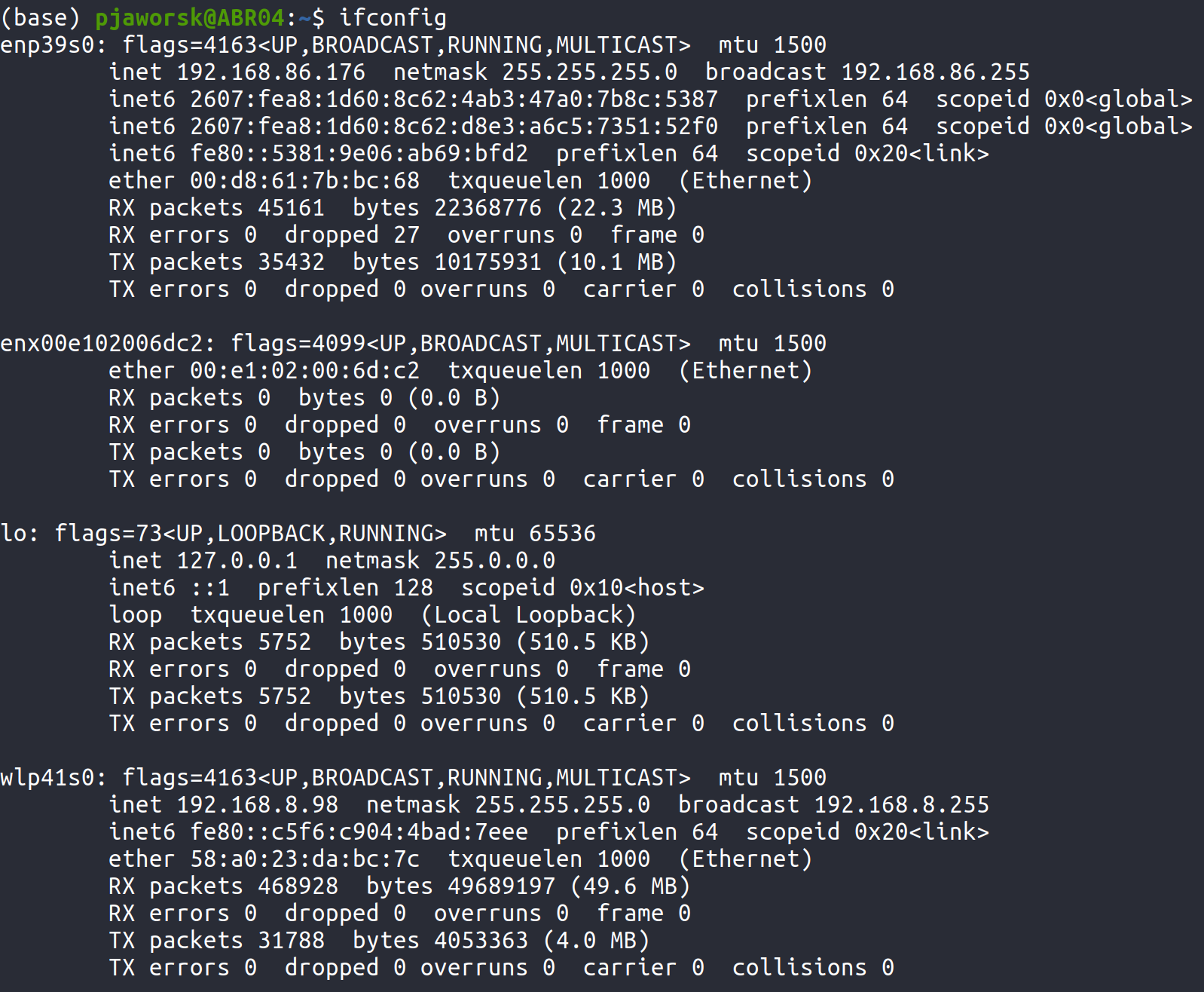
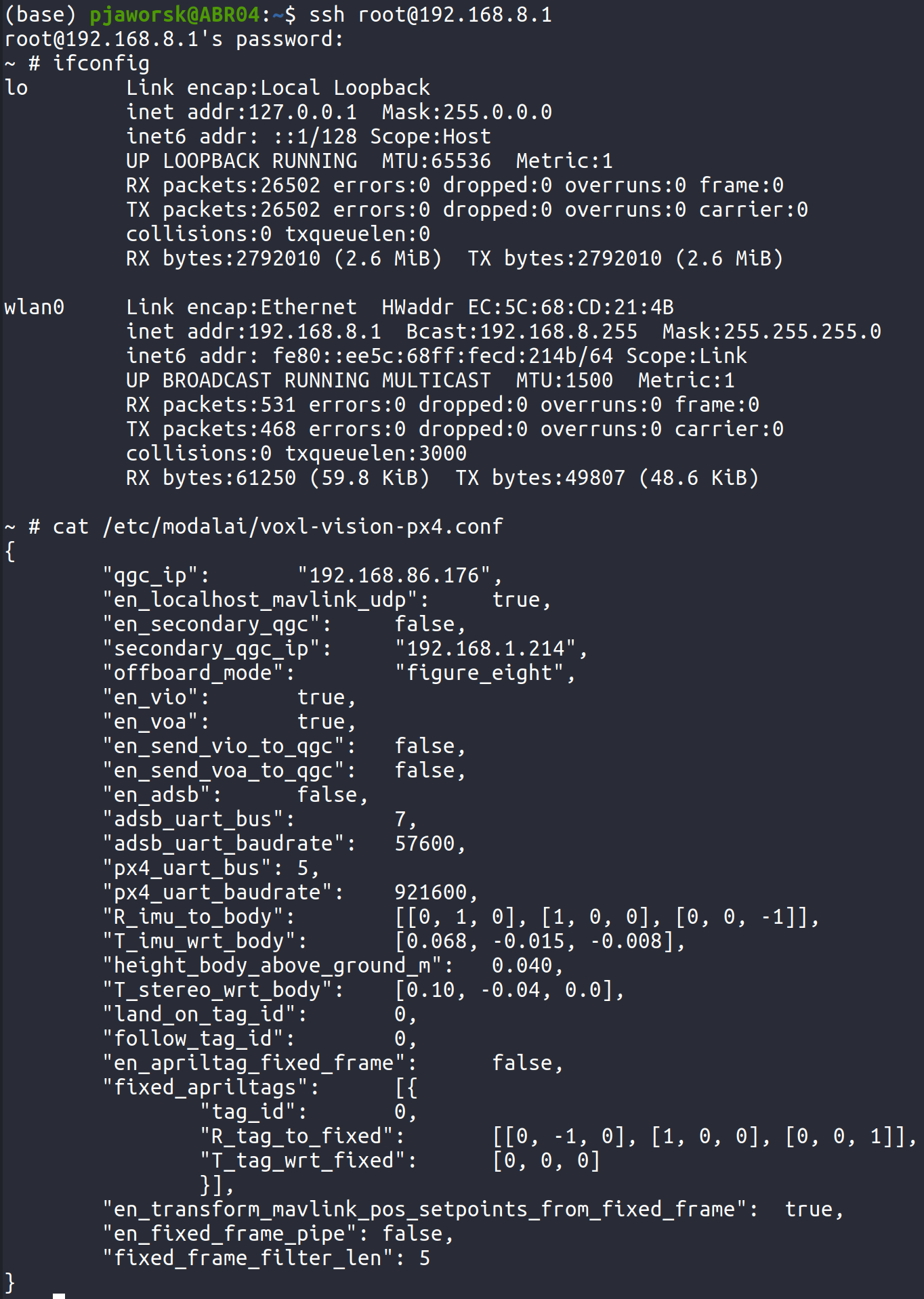
VOXL with ethernet IP
I have also checked the QCG debugging steps here, and do not have any of the connection messages in the QCG console log, however I am able to connect from my computer to the drone over ssh and wifi.Please let me know if there is any other information that can be useful for debugging.
Cheers,
Pawel
-
@tom said in Voxl not connecting to QGC:
systemctl status -l voxl-vision-px4
Sorry for the delay, I had to shift work for a few weeks. I was also able to get the drone to connect to my windows laptop, however I am still facing the same problem when connecting to my ubuntu 20 desktop. I just went through the connection process again and added my desktops ip given by the voxl-m500, and power cycled as you asked.
~ # systemctl status -l voxl-vision-px4 ● voxl-vision-px4.service - voxl-vision-px4 Loaded: loaded (/usr/bin/voxl-vision-px4; enabled; vendor preset: enabled) Active: active (running) since Thu 1970-01-01 00:00:08 UTC; 23s ago Main PID: 2869 (voxl-vision-px4) CGroup: /system.slice/voxl-vision-px4.service └─2869 /usr/bin/voxl-vision-px4 Jan 01 00:00:09 apq8096 voxl-vision-px4[2869]: [SensorImuUtil.cpp, 108] ComputeOffset The apps - dsp offset = [-1761534639]ns, Apps ClockType[CLOCK_MONOTONIC] Jan 01 00:00:09 apq8096 voxl-vision-px4[2869]: [7.963379] SNAV INFO: IMU sensor finished initializing. Jan 01 00:00:09 apq8096 voxl-vision-px4[2869]: [7.963522] SNAV INFO: IMU sensor settings retrieved. Jan 01 00:00:09 apq8096 voxl-vision-px4[2869]: [7.963537] SNAV INFO: Creating IMU thread. Jan 01 00:00:09 apq8096 voxl-vision-px4[2869]: [7.963627] SNAV INFO: Creating VISLAM processing thread. Jan 01 00:00:09 apq8096 voxl-vision-px4[2869]: [7.963682] SNAV INFO: Creating VISLAM publishing thread. Jan 01 00:00:09 apq8096 voxl-vision-px4[2869]: [7.963682] SNAV INFO: ImuManager thread has tid = 3052, nice = -15 Jan 01 00:00:09 apq8096 voxl-vision-px4[2869]: [7.963762] SNAV INFO: VISLAM processing thread has tid = 3053, nice = -5 Jan 01 00:00:09 apq8096 voxl-vision-px4[2869]: Init complete, entering main loop Jan 01 00:00:09 apq8096 voxl-vision-px4[2869]: [7.968099] SNAV INFO: VISLAM publishing thread has tid = 3054, nice = -5I am still not automatically connecting to QGC, please let me know if there is any other information I can send you.
Cheers
-
@PawelJ It looks as though you are using the correct IP in your config file and voxl-vision-px4 is running correctly. Is it possible that you have some custom firewall setup on your host PC that is blocking traffic on that port?
-
Thanks for sorting that out
") Is there a way I can mark the question as resolved? I don't see the option anywhere.
Is there a way I can mark the question as resolved? I don't see the option anywhere. -
@tom that sounds great, this forum has already been incredibly useful in my initial setup
 Just to clarify, I was asking if there was a way to mark the question as having an answer, vs being an ongoing issue. This is helpful when searching through the forum as well.
Just to clarify, I was asking if there was a way to mark the question as having an answer, vs being an ongoing issue. This is helpful when searching through the forum as well. -
@tom that sounds great, this forum has already been incredibly useful in my initial setup
Just to clarify, I was asking if there was a way to mark the question as having an answer, vs being an ongoing issue. This is helpful when searching through the forum as well.
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login