Microhard support
-
Hello,
Just have a question about setting up microhard for our vehicle. The current setup is Pix Cube with MH pDDL2450. We are wanting to add the Voxl2 as a companion. We are able to get the Voxl2 connected to the SER3 port for Communication to the FC.
Do we need to directly attach the MH to the Voxl2s carrier add-on? or will utilizing the mavlink server be sufficient since the MH that is currently in the vehicle is located elsewhere.
The GCS is a proprietary standalone tablet with MH built in. We will need to add another laptop based MH unit. Im assuming with the MIMO functions we should be fine.
Any thoughts to these functions?
-
I think this document might help? https://docs.modalai.com/voxl2-external-flight-controller/
-
Hi @Chad-Sweet, It does help, but we are using the usb/uart expansion board for the UART to the external FC, and my understanding is that if we use the Microhard carrier board that uart goes away, so its either or. Im just trying to wrap my head around if we are able to use the already in place MH to communicate with the VOXL2.
-
Hi @Chad-Sweet, It does help, but we are using the usb/uart expansion board for the UART to the external FC, and my understanding is that if we use the Microhard carrier board that uart goes away, so its either or. Im just trying to wrap my head around if we are able to use the already in place MH to communicate with the VOXL2.
Hi @McMason ,
This may also help so you can still access a UART on our M0048 board to cascade your Flight Controller to... needs a little bit of soldering and translation buffers, but doable.Does the Microhard Modem Add-on with USB Hub expose a viable UART to connect an External Flight Controller to VOXL 2?
Reading the documentation, the connection to an external flight controller requires the VOXL 2 USB3.0 / UART Expansion Adapter; however, the connection betwe...
ModalAI Forum (forum.modalai.com)
Let us know if this helps!
Vinny -
Hi @Vinny thank you, I did see that thread. I am however not using any other UART function on VOXL2. That being said could i use J18 (ESC UART) or J19 (GNSS UART) to connect to the external FC, and still be able to add in Microhard with the carrier board?
-
Hi @Vinny thank you, I did see that thread. I am however not using any other UART function on VOXL2. That being said could i use J18 (ESC UART) or J19 (GNSS UART) to connect to the external FC, and still be able to add in Microhard with the carrier board?
Hi @McMason
I think the restriction right now on an external flight controller is it needs to be an applications processor UART. The direct JST UART ports on Voxl2 are for the "SLPI" (the DSP) and I do not think that is supported right now.
Someone from the SW team will need to chime in.
However, I'm still not 100% clear on your system configuration, so I think our SW team may also be slightly unsure of what you are trying to connect and how. I am not familiar with the Pix Cube at all.... maybe if you drew up a quick and dirty diagram of what you want, we can better help.Thanks!
-
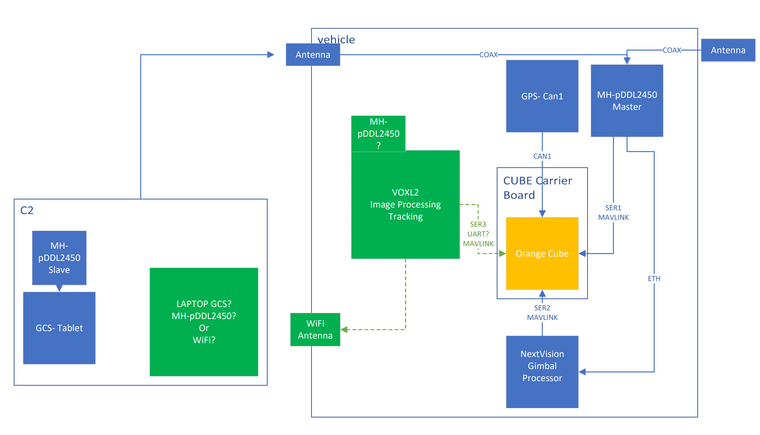
@Vinny Yeah I do not have parts in hand yet just trying to wrap my head around how everything will work. So yes im unsure myself. But heres a crude block D as it would be right now.
Everything in BLUE works as it should. Components in Green are whats in Question.
Biggest question I have is can I leave the MH where it is in the vehicle and still be able to communicate to the VOXL2? I know the block diagram you have shows the IP link and comms going to the VOXL2 first.
Im guessing no, but its worth a shot to ask haha
This is not on a Sentinel anymore so we are integrating your components into another vehicle.Again apologies for not being 100% clear just trying to get a grasp on this.
-
@Vinny Yeah I do not have parts in hand yet just trying to wrap my head around how everything will work. So yes im unsure myself. But heres a crude block D as it would be right now.
Everything in BLUE works as it should. Components in Green are whats in Question.
Biggest question I have is can I leave the MH where it is in the vehicle and still be able to communicate to the VOXL2? I know the block diagram you have shows the IP link and comms going to the VOXL2 first.
Im guessing no, but its worth a shot to ask haha
This is not on a Sentinel anymore so we are integrating your components into another vehicle.Again apologies for not being 100% clear just trying to get a grasp on this.
-
Hi @McMason
Looking at your diagram, I do have a couple comments and info now that this is made much clearer for us. I also understand your original questions now too.First, the sales pitch.... I think you can consider FlightCoreV2 instead of the pixcube for flight control. We are much much smaller than anything I see in a quick search for "pixcube flight controller" and cheaper too... plus NDAA complaint. Not sure if that matters to you or not, but something to ponder. We support CANBUS on FCv2 and several UART ports, which based on your diagram, is all that is needed.
So, few points, in random order (and some may feed back into each other as I think of them, so apologies for the poor flow of my writing):
I see you are thinking about Voxl2 as an image processing unit, which is a smart plan, but I am not sure what images you are trying to process??? Is it from the NV gimbal, or other sensors not shown?
We have worked with Nextvison Gimbals a few years ago, so maybe our SW team can chime in if support for that would be best from the FC or the companion computer. If you are really just focused on stable flight and attitude control from the FC, moving any kind of imagery the companion computer is a logical choice. It seems as if you are trying to pump the video feed right into the MH radio using ETH.
Note: Our MH modules do not expose the Ethernet ports of the MH modules, only USB.
If you want to pump the video from the NextVision gimbal into a companion computer for processing, we work best with raw data using MIPI, but USB could be an option. We do not have an HDMI input, which we have had to try before on the "DragonEye" module from NextVision, and it was not the smoothest. My PC is having a hard time accessing the NV website for some reason (claims destination issues), so I am not sure if DragonEye2, is still (or only) HDMI as an option. Is ETH an option? If so, we do have some designs with ETH, but they are not mainstream. We could possibly bring them to market if the business case was there. That's a conversation you'd have to have with Chad. For now, we kept ETH mostly as internal since most folks do not need/want it.
We are almost about to announce our own NDAA WiFi module soon... so stay tuned to that... give us a month or so and we may have our first beta units ready. Keep in mind though WiFi + MH at 2450 will likely collide with each other at the 2.4G ISM band... make sure you get familiar with disabling one or the other and turning them back on from the scripts. I know our Dev Team member Tom has many forum posts/responses on related topics like that.
So, when it comes to our MH radios, and our 4G/5G modems, they all operate over USB in our architecture. We have options for plug-in directly to Voxl2 through the B2B connectors, or we have stand-alone options as well, which just required an independent 5V supply and a link to one of our USB ports from the 60-pin B2B connector on Voxl2 (J3).
We have a USB + UART board that can allow you the freedom to connect standalone Modem or Radio boards, and keep a UART link which might be mappable to Mavlink messaging. SW will need to chime in. I'll tag our teams internally to respond to this to make sure I am not sending you down the wrong path.
Here is the USB + UART debug board:
https://www.modalai.com/products/m0125?variant=40740708876339
Here is our MH radio, (it's an older image as we now have a connector instead of bare wires) with a connector cable option to with tinned leads:
https://www.modalai.com/products/mh-sa
Included In Kit
External power supply cable (MCBL-00017-1) used to connect to external 5VDC power supply
https://docs.modalai.com/cable-datasheets/#mcbl-00017Note, if you decide to get a MH plug-in board for Voxl2 (as opposed to the Standalone variant link I posted above), it does not have a mating 120-pin connector (the MH design pre-dated Voxl2) so we would ask you to place Kapton tape on the 120-pin J5 of Voxl2 to prevent any possible shorting to components on the bottom of the MH board.
I'll ask our PX4 experts to review this thread too and respond if I mis-stated anything (I am hardware, so not always sure the way this SW all works together).
Let us know if that helps bring more clarity (or more confusion... haha) to your scenarios you are trying to figure out.
-
Hi @Vinny, thank you for that. In the future we will look to going strictly VOXL2 or related. Right now we only have the time to integrate into an OEM that utilizes the above.
The DragonEye2 has ETH and a couple of com ports which right now its eth up to the MH, and serial to the FC.
Ill look into the USB side from NV.
-
Ive been scouring some px4/ardupilot libs and found a few. this one gave me a little hope haha
https://ardupilot.org/dev/docs/mavlink-routing-in-ardupilot.html@McMason Keep us posted and let us know what you find out.
I asked one of our team experts to review this thread for me, so hopefully he'll respond with any news too.
To check the USB side of things, you can experiment with this cable:
https://docs.modalai.com/cable-datasheets/#mcbl-00009
Might need a straight pass from our Type-A to the NV Type-A, but worth a shot. -
HI @Vinny just poking to see if any of your team had any more ideas? Ill be integrating stuff next week.
@McMason Sorry, I know they are swamped too. Trying my best to help them out, but I am not SW, so the best bet is to get familiar with any and all PX4 docs that you can and if you have any issues integrating, then please start a new thread with specific issues/roadblocks you encounter. That will tag the whole team and maybe you can get new responses that way.
The more "generic" the forum question, it's harder for a good easy response. The more specific, the easier it is and our team usually can provide answers very fast that way.


Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login