@Zachary-Lowell-0 Am I using the wrong serial port? Currently set up with TTYHS0 on J10

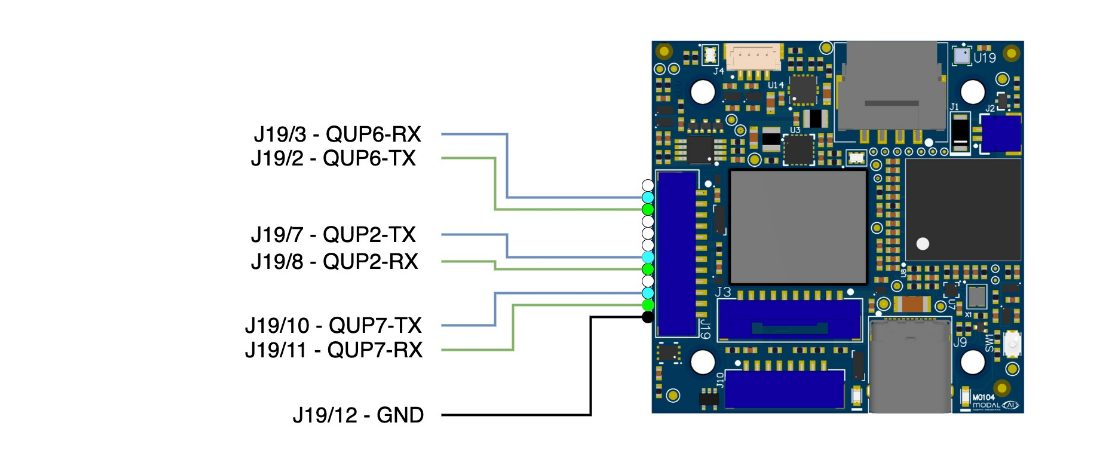
In the guide its showing the QUPs on J19 being connected
@Zachary-Lowell-0 Am I using the wrong serial port? Currently set up with TTYHS0 on J10
In the guide its showing the QUPs on J19 being connected
Hi @Zachary-Lowell-0 the serial line is correct, i do see there is an established connection to a flight controller with sys id of 2. Running our developed code we are able to follow a target based on target in frames, the aircraft responds well to VOXL2 mini inputs and corrections.
What is the expected outcome of running the mavlink inspect sys_status? should it show a data stream, again I am just seeing waiting for pipe to connect.
{
"primary_static_gcs_ip": "192.168.8.10",
"secondary_static_gcs_ip": "192.168.8.11",
"onboard_port_to_autopilot": 14556,
"onboard_port_from_autopilot": 14557,
"gcs_port_to_autopilot": 14558,
"gcs_port_from_autopilot": 14559,
"en_external_uart_ap": true,
"autopilot_uart_bus": 0,
"autopilot_uart_baudrate": 921600,
"en_external_ap_timesync": 1,
"en_external_ap_heartbeat": 1,
"udp_mtu": 0,
"gcs_timeout_s": 4.5
Tried to send you the file, but it says i do not have the privileges to do so. I am not using a HAT board on the VOXL2 MINI, i am using J10 pins 4 and 5 respectively for the UART TX and RX.
Hi @Zachary-Lowell-0 I did update the config file using uart bus 0 and the correct baud rates, as well as the external FC params. When I use voxl-inspect-mavlink mavlink_onboard i am not seeing the ID of the FC populate. I see there is areas in the vision hub conf file for mavlink. Also the guide mentions using voxl-cross docker. Is this needed for the mavlink server to talk to an FC via mavlink? In respect to the serial line the vehicle is navigating from the Voxl minis input and i would assume its good.
Good morning,
Looking at the mavlink server and needing be able to send a command to control a gimbal device. I am trying to test the status of the server and i only get waiting for pipe to connect.
I am connected to an external FC through UART pins 4 and 5 on J10 and we are able to control the UAS from the voxl2 for our usecase. Looking to get some guidance on where to turn to.
Matt
Good morning all. We are seeing in our setup a camera server crash randomly crashing. We will get frames and at somepoint we stop. Resetting the camera server works.
We are running a single hires in our system.
Thoughts?
Hi @modaltb, we are having that issue on a certain VOXL2 board. We had an extra Voxl2 we put in and the issue isnt there as expected. Once i get a free moment ill dig back into the problem board. as of now its ok.
Good afternoon,
Recently an issue came up where we had to reflash system image .9 to our sentinel. Before this the wifi was happy and worked as it should. Now we are getting this message when trying to set station mode.
oxl2:/$ voxl-wifi station "Somethin1" "somethingelse"
creating new wpa_supplicant.conf for station mode
/usr/bin/voxl-wifi: line 203: /data/misc/wifi/wpa_supplicant.conf: No such file or directory
/usr/bin/voxl-wifi: line 238: /data/misc/wifi/wlan_mode: No such file or directory
Station Mode Setup Complete!
Changes should be active in a few seconds
any thoughts here?
Update: looks as if my level shifter was a little low on the 3.3v side replaced and I’m talking to the FC now.
Also will i need to replicate the set up as in do i need a GPS directly to the VOXL2and the orientations to be set?
I when i run voxl-mavlink-server -s i see the outgoing. When i run with a -r there is no printing of outgoing messages.
What i have:
Voxl2 0.9
Microhard add on
UART from the Microhard
logic level from 1.8 to 3.3v
Verified the voltage shift
I saw a mention of a SDK fix that was about 14hours old. I just need a good start to troubleshoot this