Multiple Critical Bugs in voxl-imu-server: Incorrect FIFO Latching and HiRes Indexing (ICM-42688)
-
While auditing the IMU driver logic for the QRB5165 (icm42688.cpp), I identified two significant logical errors in how the ICM-42688-P FIFO data is retrieved and parsed. These bugs affect data integrity and 20-bit precision.
Bug 1: Incorrect FIFO_COUNT Latching Sequence (Race Condition)
Location: src/drivers/icm42688.c (inside read_imu_fifo)
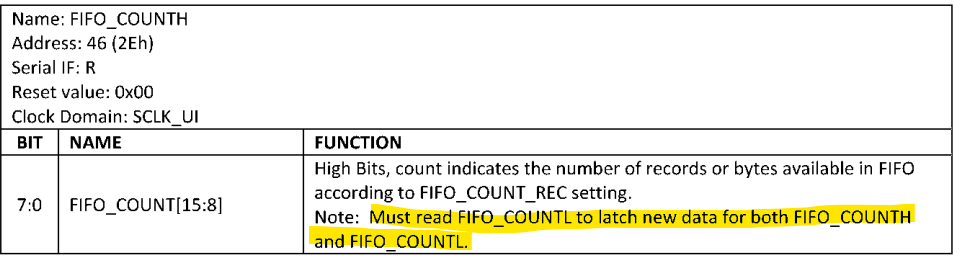
The current implementation reads fifo_count starting from FIFO_COUNTH (0x2E).// first read how many bytes are available using the fifo_count register ret = voxl_spi_read_reg_word(bus, count_address, &fifo_count);but acording to IMU document we must read FIFO_COUNTL to latch the data
Bug 2: Index Mismatch in 20-bit HiRes Packet Parsing
Location: fifo_read function under #ifdef HIRES_FIFOTechnical Detail:
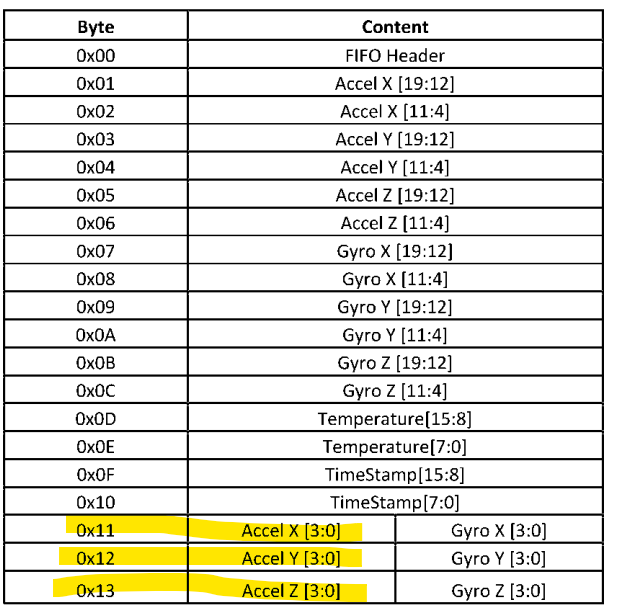
When parsing Packet 4 (20-byte), the code maps the extension bits (lower 4 bits) incorrectly for the accelerometer.ax32 = ((int32_t)ax16 << 4) | ((base[11] & 0xF0) >> 4); ay32 = ((int32_t)ay16 << 4) | ((base[12] & 0xF0) >> 4); az32 = ((int32_t)az16 << 4) | ((base[13] & 0xF0) >> 4);It uses byte indices 11, 12, and 13, but these correspond to Gyro Z and Temperature data. The correct indices are 17, 18, and 19.
-
While auditing the IMU driver logic for the QRB5165 (icm42688.cpp), I identified two significant logical errors in how the ICM-42688-P FIFO data is retrieved and parsed. These bugs affect data integrity and 20-bit precision.
Bug 1: Incorrect FIFO_COUNT Latching Sequence (Race Condition)
Location: src/drivers/icm42688.c (inside read_imu_fifo)
The current implementation reads fifo_count starting from FIFO_COUNTH (0x2E).// first read how many bytes are available using the fifo_count register ret = voxl_spi_read_reg_word(bus, count_address, &fifo_count);but acording to IMU document we must read FIFO_COUNTL to latch the data
Bug 2: Index Mismatch in 20-bit HiRes Packet Parsing
Location: fifo_read function under #ifdef HIRES_FIFOTechnical Detail:
When parsing Packet 4 (20-byte), the code maps the extension bits (lower 4 bits) incorrectly for the accelerometer.ax32 = ((int32_t)ax16 << 4) | ((base[11] & 0xF0) >> 4); ay32 = ((int32_t)ay16 << 4) | ((base[12] & 0xF0) >> 4); az32 = ((int32_t)az16 << 4) | ((base[13] & 0xF0) >> 4);It uses byte indices 11, 12, and 13, but these correspond to Gyro Z and Temperature data. The correct indices are 17, 18, and 19.
Hello @Igor ,
After a quick look your concerns seem valid to me. We will investigate this further and get back to you soon.
Thank you for reporting the issue.
Alex
-
Hello @Igor ,
After a quick look your concerns seem valid to me. We will investigate this further and get back to you soon.
Thank you for reporting the issue.
Alex
@Igor ,
You are absolutely correct about the incorrect parsing of the accel data. This is a typo and it was not detected because the effect of it is very small (4 LSB of the 20-bit number). The accelerometer noise in flight will dominate and these bytes will have no effect. We will fix this bug.
Regarding the order of the reading of FIFO_COUNT, we looked at many other sources, including the reference code from TDK and all the implementations read the FIFO_COUNTH first, so we suspect that the documentation has a typo (which makes sense, otherwise the implementation would have to have separate transactions for reading the H and L parts).
Thank you again for your bug report.
Alex
-
@Igor ,
You are absolutely correct about the incorrect parsing of the accel data. This is a typo and it was not detected because the effect of it is very small (4 LSB of the 20-bit number). The accelerometer noise in flight will dominate and these bytes will have no effect. We will fix this bug.
Regarding the order of the reading of FIFO_COUNT, we looked at many other sources, including the reference code from TDK and all the implementations read the FIFO_COUNTH first, so we suspect that the documentation has a typo (which makes sense, otherwise the implementation would have to have separate transactions for reading the H and L parts).
Thank you again for your bug report.
Alex
@Alex-Kushleyev Hi Alex,
Thank you for the clarification.
That makes sense regarding the accel parsing—agreed that a 4 LSB discrepancy on a 20-bit value is negligible compared to in-flight noise, but it’s good to see it will be corrected.
Appreciate you taking the time to investigate and confirm.
Igor
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login